ВУЗ: Камская Государственная Инженерно-Экономическая Академия
Категория: Учебное пособие
Дисциплина: Электротехника
Добавлен: 10.02.2019
Просмотров: 1999
Скачиваний: 7
СОДЕРЖАНИЕ
1. Реостатные преобразователи линейных и угловых перемещений.
4. Индуктивные преобразователи линейных величин.
6. Контактные преобразователи и преобразователи контактного сопротивления
7.Термоэлектрические преобразователи (принцип действия, их измерительные цепи).
9.Электростатические преобразователи (принцип действия, область применения).
10. Пьезоэлектрические преобразователи. Прямой и обратный пьезоэффект.
11. Пьезорезонансные преобразователи.
12.Измерительные преобразователи, основанные на использовании ПАВ.
13. Вихретоковые преобразователи.
14.Фотоприемники. Фоторезисторы и фотодиоды. Схемы включения.
1. Реостатные преобразователи линейных и угловых перемещений.
Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины.
Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной величиной — сопротивление.
На рис. 5-7, а показано устройство реостатного преобразователя. На каркас 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.

Реостатные преобразователи выполняют как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной коррозионной и износостойкостью; применяются также манганин, константан, фехраль.
Формы каркасов
очень разнообразны: они могут быть в
виде пластины, цилиндра, кольца и т. д.
Выбирая форму каркаса, можно получить
определенную функциональную зависимость
между перемещением и выходным
сопротивлением, как показано в качестве
примера на рис. 5-7, б.
Выходное
сопротивление реостатного преобразователя,
периметр каркаса р
и входное
перемещение x
связаны между
собой зависимостью![]() ,
где r
- сопротивление
1 м провода;
,
где r
- сопротивление
1 м провода;![]() ω0
— число витков на единицу длины
преобразователя. Из заданной зависимости
R=φ
(x)
можно определить зависимость р
= f
(x)
ω0
— число витков на единицу длины
преобразователя. Из заданной зависимости
R=φ
(x)
можно определить зависимость р
= f
(x)
Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преобразователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. При перемещении движка преобразователя на расстояние l, соответствующее ω виткам, будут иметь место 2ω ступенек, однако эти ступеньки неодинаковы по длине преобразователя.
Рассмотрим в
качестве примера выходную характеристику
преобразователя, включенного в режиме
делителя напряжения, как показано на
рис. 5-7, в. В
положении 1
движок, имеющий ширину 2d,
где d
— диаметр
витка, замыкает накоротко витки а
и b,
и выходное
напряжение
![]() ,
где ω0 — полное число витков и п
— число витков
до витка а. При
смещении движка на расстояние d/2,
т. е. в положение
2, движок
замыкает накоротко три витка а,
b
и с,
и выходное
напряжение
,
где ω0 — полное число витков и п
— число витков
до витка а. При
смещении движка на расстояние d/2,
т. е. в положение
2, движок
замыкает накоротко три витка а,
b
и с,
и выходное
напряжение
![]() ,
при смещении движка еще на d/2
выходное
напряжение
,
при смещении движка еще на d/2
выходное
напряжение
![]() .
Размер ступенек напряжения при перемещении
движка на расстояние d/2
будет зависеть
от п: первая
ступенька с увеличением п
увеличивается,
а вторая — уменьшается, сумма остается
постоянной:
.
Размер ступенек напряжения при перемещении
движка на расстояние d/2
будет зависеть
от п: первая
ступенька с увеличением п
увеличивается,
а вторая — уменьшается, сумма остается
постоянной:
![]() .
Выходное напряжение преобразователя
показано на рис. 5-7, в.
.
Выходное напряжение преобразователя
показано на рис. 5-7, в.
Дополнительное
расширение полосы неопределенности
происходит за счет шума, «генерируемого»
движком при его движении (вариации
контактного сопротивления, временное
разъединение движка и контактной
дорожки, ЭДС трения и т. д.). Поэтому в
целом погрешность нуля реостатных
преобразователей оценивается значением:
![]() .
.
Измерительные цепи, в которые включаются реостатные преобразователи, питаются преимущественно постоянным напряжением, но могут питаться и переменным напряжением. Напряжение питания преобразователя определяется его допустимой мощностью (для самых малогабаритных преобразователей допустимая мощность составляет не менее 0,1 Вт) и сопротивлением. Напряжение питания, как правило, стабилизируется. Наиболее распространенным является включение преобразователя в виде управляемого делителя напряжения или включение преобразователя в измерительный мост. Номинальное изменение сопротивления реостатного преобразователя достигает 90%, поэтому необходимо учитывать нелинейность, вносимую измерительной схемой, и, исходя из допустимой погрешности линейности, выбирать сопротивление измерительного прибора.
Применяется в устройствах электроавтоматики.
-
Металлические тензорезисторы. Конструкция. Области применения.
В основе работы
тензорезисторов лежит явление
тензоэффекта, заключающееся в изменении
сопротивления проводников и полупроводников
при их механической деформации.
Относительное изменение сопротивления
![]() при деформации резистора определяется
как
при деформации резистора определяется
как
![]() .
Учитывая, что в твердом теле в зоне
упругих деформаций величины поперечных
и продольных деформаций связаны через
коэффициент Пуассона μ как
.
Учитывая, что в твердом теле в зоне
упругих деформаций величины поперечных
и продольных деформаций связаны через
коэффициент Пуассона μ как
![]()
![]() ,
где b
– поперечный размер проводника, выражение
для
,
где b
– поперечный размер проводника, выражение
для
![]() можно представить в виде
можно представить в виде
![]() .
.
В металлах удельное сопротивление зависит только от напряжения растяжения или сжатия (рис. 5-8, а), не зависит от сдвиговых напряжений и определяется как:
![]() ,
,
где σ1, σ2, σ3 – механические напряжения в трех взаимно перпендикулярных направлениях; π11 и π12= π13 – тензорезистивные коэффициенты, называемые соответственно продольным и поперечным; E1 и J1 – напряженность поля и плотность тока в направлении 1, совпадающим с направлением действия напряжения σ1 (рис. 5-8, б).

Для металлического тензоэлемента π11= π22= π33 и π12= π13= π21= π23= π32.
Для константана,
из которого чаще всего делают
тензорезисторы, π11=![]() ;
π12=
;
π12=![]() .
.
При линейно
напряженном состоянии σ1=σ,
σ2=
σ3=0;
![]() ;
;
![]() .
.
Учитывая, что в
зоне упругих деформаций σ = Е![]() ,
где Е – модуль упругости, получим:
,
где Е – модуль упругости, получим:
![]() .
Величина
.
Величина
![]() - коэффициент тензочувствительности.
- коэффициент тензочувствительности.
При гидростатическом
сжатии изменения сопротивления и
давления связаны формулой
![]() .
Коэффициент
.
Коэффициент
![]() - барический коэффициент резисторов.
Барический коэффициент константана
- барический коэффициент резисторов.
Барический коэффициент константана
![]() ,
манганина
,
манганина
![]() .
.
При изменении температуры изменяется начальное сопротивление тензорезистора и коэффициент тензочувствительности. Таким образом, для тензорезисторов характерна температурная погрешность нуля и температурная погрешность чувствительности. Изменение начального сопротивления наклеенного тензорезистора определяется двумя факторами: изменение удельного сопротивления материала ρ непосредственно под действием температуры и изменением ρ под действием дополнительного механического напряжения, появляющегося в тензорезисторе, если коэффициенты линейного расширения детали и тензорезистора не равны. Величина кажущейся деформации под воздействием температуры определяется формулой:

![]()
где αθ – ТКС тензодатчика;
βД и βТ – коэффициенты линейного расширения материалов детали и тензодатчика.
Конструкция металлических тензорезисторов.
Устройство наиболее распространенного типа наклеиваемого проволочного тензорезистора изображено на рис. 5-12, а. На полоску тонкой бумаги или лаковую пленку 2 наклеивается так называемая решетка из зигзагообразно уложенной тонкой проволоки 3 диаметром 0,02— 0,05 мм. К концам проволоки присоединяются (пайкой или сваркой) выводные медные проводники 4. Сверху преобразователь покрывается слоем лака 1. Такой преобразователь, будучи приклеенным, к испытуемой детали, воспринимает деформации ее поверхностного слоя. Измерительной базой преобразователя является длина детали, занимаемая проволокой. Наиболее часто используются преобразователи с базами 5—20 мм, обладающие сопротивлением 30—500 Ом.
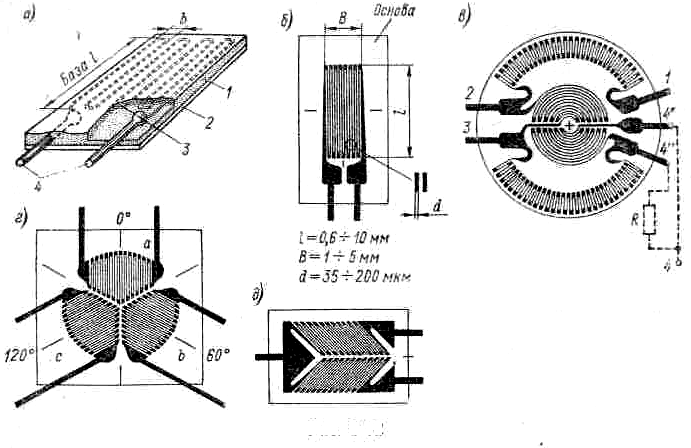
Фольговые преобразователи представляют собой ленту из фольги толщиной 4—12 мкм, на которой часть металла выбрана травлением таким образом, что оставшаяся его часть образует решетку с выводами. Фольговые преобразователи имеют меньшие габариты, чем проволочные; известны тензорезисторы с базой до 0,8 мм.
Металлические пленочные тензорезисторы изготовляются путем вакуумной возгонки тензочувствительного материала с последующим осаждением его на основу (подложку). Форма тензорезистора задается маской, через которую производится напыление. Пленочные тензорезисторы имеют толщину меньше 1 мкм.
Весьма важным параметром тензочувствительной решетки является расстояние между витками. Это расстояние определяет при заданных габаритах резистора число витков и, следовательно, сопротивление, а также допустимый ток, который ограничивается самонагревом и будет тем меньше, чем меньше расстояние между витками.
Кроме того, наличие
поперечных участков длиной b
(рис. 5-12, а)
вызывает
изменение сопротивления тензорезистора
за счет деформации этих участков при
действии на деталь напряжения,
перпендикулярного оси чувствительности
тензорезистора. Для проволочных
тензорезисторов отношение поперечной
и продольной чувствительностей
определяется отношением
![]() .
У фольговых тензорезисторов поперечная
чувствительность значительно меньше
за счет расширения поперечных участков
(рис. 5-12, б).
.
У фольговых тензорезисторов поперечная
чувствительность значительно меньше
за счет расширения поперечных участков
(рис. 5-12, б).
Характерные типы
фольговых преобразователей показаны
на рис. 5-12, в,
г, д. На рис.
5-12, в изображен
элемент, состоящий из четырех
тензорезисторов, образующих четыре
плеча моста. Этот элемент наклеивается
на мембрану Тензорезисторы, расположенные
в центре, испытывают растяжение, на
периферии — сжатие. К выводам 1
и 3 подводится
питание, выводы![]() образуют измерительную диагональ.
Выводы
образуют измерительную диагональ.
Выводы
![]() разомкнуты
для того, чтобы можно было включить
добавочный резистор R
в нужное плечо
и добиться подбором R
равновесия
моста. Розетка из трех тензорезисторов,
показанная на рис 5-12, г,
применяется
при измерении напряжений детали,
находящейся в плосконапряженном
состоянии, в том случае, когда направления
действия напряжений неизвестны. По
изменениям сопротивлений трех
тензорезисторов определяются направления
главных напряжений и их значения.
Элемент, показанный на рис. 5-12, д,
состоит из двух
тензорезисторов и используется при
измерении деформации валов при их
скручивании
разомкнуты
для того, чтобы можно было включить
добавочный резистор R
в нужное плечо
и добиться подбором R
равновесия
моста. Розетка из трех тензорезисторов,
показанная на рис 5-12, г,
применяется
при измерении напряжений детали,
находящейся в плосконапряженном
состоянии, в том случае, когда направления
действия напряжений неизвестны. По
изменениям сопротивлений трех
тензорезисторов определяются направления
главных напряжений и их значения.
Элемент, показанный на рис. 5-12, д,
состоит из двух
тензорезисторов и используется при
измерении деформации валов при их
скручивании
Для тензорезисторов, работающих в диапазоне температур до 180°С, в качестве тензочувствительного материала используется константан. Для более высоких температур (200—1000 °С) применяются специальные сплавы.
Основа тензорезистора (рис. 5-12, а) представляет собой тонкую полоску пропитанной клеем бумаги или лаковую пленку, из этого же материала выполняется обычно и покрышка. При высокой температуре (до 400 °С) может быть применена стеклоткань, пропитанная высокотемпературным цементом.
Для крепления тензорезистора к детали чаще всего используется клей Креплению должно уделяться очень большое внимание, так как именно через пленку клея происходит передача деформации с детали на тензорезистор и теплоотдача в деталь.
Нарушение технологии может привести к весьма существенным погрешностям, вызываемым ползучестью клея. В результате ползучести измеряемая деформация уменьшается по абсолютной величине. Значение погрешности зависит от технологии приклейки, температуры, величины деформации и в лучшем случае составляет 0,05 – 0,2%.

Из сравнения температурных возможностей тензочувствительного материала и клея видно, что ограничение температурного диапазона обуславливается прежде всего клеями. Поэтому для крепления высокотемпературных тензорезисторов применяются неорганические фосфатные цементы и жаростойкие окислы алюминия, наносимые на деталь методом газопламенного напыления. При таком креплении температурный диапазон ограничивается не ползучестью крепления с повышением температуры, а ухудшением изоляционных свойств цемента или окиси алюминия. Рабочий диапазон тензорезисторов ограничен температурой 350 - 600ºС. При статических деформациях и 600-800ºС при динамических деформациях. В случае измерения динамических деформаций в диапазоне температур до 1000ºС применяется крепление с помощью контактной сварки.
Область применения тензорезисторов.
При всем многообразии задач, решаемых с помощью тензорезисторов, можно выделить две основные области их использования.
К первой области относятся исследования физических свойств материалов, деформаций и напряжений в деталях и конструкциях. Для этих задач характерны значительное число точек тензометрирования, широкие диапазоны изменения параметров окружающей среды, а также невозможность градуировки измерительных каналов. Основной причиной погрешности в этих случаях является разброс параметров тензорезисторов R и KT вокруг средних для данной партии значений, и погрешность измерения составляет 2-10%.
Вторая область — применение тензорезисторов для измерения механических величин, преобразуемых в деформацию упругого элемента. В этом случае датчики градуируются по измеряемой величине и погрешности измерений лежат в диапазоне 0,5—0,05%.
Тензорезисторы
используются для измерения статических
и динамических деформаций, верхняя
граница частотного диапазона определяется
соотношением между длиной волны λ и
базой l
тензорезистора. Для того чтобы не было
искажения результата измерения из-за
усреднения деформации, принимается
отношение
![]() .
В частности, для измерения в стальных
деталях динамических деформаций с
частотой до 50 кГц должны применяться
тензорезисторы с базой, не большей
10 мм, так как скорость распространения
ультразвука в стали v
= 5000 м/с и длина волны
.
В частности, для измерения в стальных
деталях динамических деформаций с
частотой до 50 кГц должны применяться
тензорезисторы с базой, не большей
10 мм, так как скорость распространения
ультразвука в стали v
= 5000 м/с и длина волны
![]() .
.
При измерении
динамических деформаций величина
максимальной деформации для проволочных
тепзорезисторов не должна превышать
![]() ,
для полупроводниковых
,
для полупроводниковых
![]() ,
так как при больших деформациях резко
понижается надежность тензорезисторов.
,
так как при больших деформациях резко
понижается надежность тензорезисторов.
Для повышения
точности и чувствительности
тензорезисторов, а также измерительных
цепей к ним представляет интерес
установление предельных возможностей
тензорезисторов, определяемых
термодинамическими флюктуациями.
Тензорезистор является параметрическим
преобразователем с внутренним
сопротивлением R
и может представлен в виде эквивалентного
генератора с мощностью короткого
замыкания
![]() ,
где РT,
— мощность, потребляемая тензорезистором.
Средняя мощность термодинамического
шума равна
,
где РT,
— мощность, потребляемая тензорезистором.
Средняя мощность термодинамического
шума равна
![]() ,
где
,
где
![]() Дж/К
— постоянная Больцмана; Т — абсолютная
температура;
Дж/К
— постоянная Больцмана; Т — абсолютная
температура;
![]() —
полоса частот. Отсюда средняя
квадратическая погрешность находится
в виде:
—
полоса частот. Отсюда средняя
квадратическая погрешность находится
в виде:
![]() .Полупроводниковые
тензорезисторы. Интегральное исполнение.
.Полупроводниковые
тензорезисторы. Интегральное исполнение.




