Добавлен: 03.02.2024
Просмотров: 11
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Ульяновский государственный педагогический университет имени И.Н. Ульянова»
Факультет Иностранных языков
Тема реферата
Marc Raibert
Выполнил:
студентка 2 курса
группы Бз-19
Д.Э.
г. Ульяновск, 2021 г.
Marc Raibert

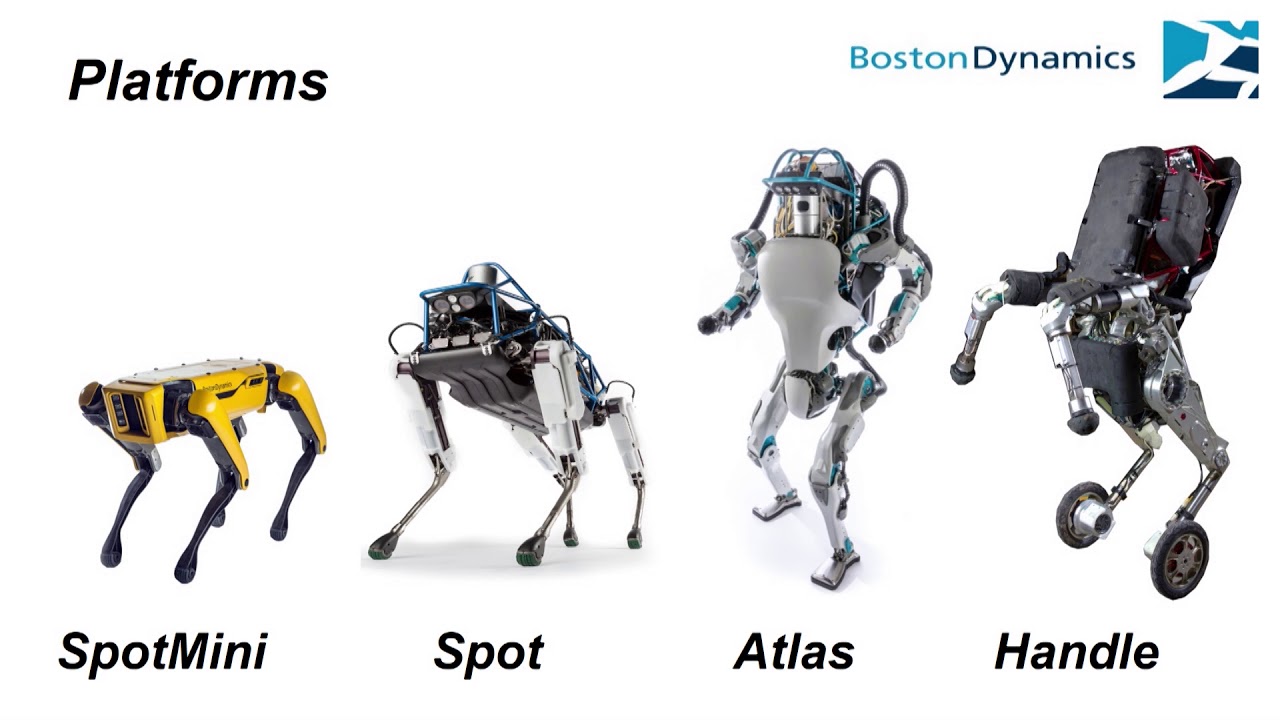
Marc Raibert (born December 22, 1949) is the founder, former CEO, and now Chairman of Boston Dynamics, a robotics company known for creating BigDog, Atlas, Spot, and Handle. Before starting Boston Dynamics, Raibert was professor of Electrical Engineering and Computer Science at MIT and an associated professor of Computer Science and Robotics at Carnegie Mellon University. At CMU he founded the Leg Laboratory (1980), a lab that helped establish the scientific basis for highly dynamic robots. Raibert developed the first self-balancing hopping robots, a significant step forward in robotics. Raibert earned an Electrical Engineering, BSEE from Northeastern University in 1973 and a PhD from MIT in 1977. His dissertation is entitled "Motor control and learning by the state space model".Raibert is a member of the National Academy of Engineering.
Marc Raibert as a young man.
Raibert's dream is to advance bipedal and quadrupedal robotics to a supernatural state. Boston Dynamics was acquired by Google in December 2013. On the acquisition, Raibert commented that he was "excited by Andy Rubin and Google’s ability to think very, very big... with the resources to make it happen." In March 2016, Google began offering Boston Dynamics for sale. The company was acquired by SoftBank in June 2017.

Lecture on the exploration of Mars. 2018
-
Patents granted to Marc Raibert
1.1. Actuator system
U.S. Patent 8,126,592 Actuator system, Issued: February 28, 2012.
An actuator subsystem preferably for a robot or bionic linkage. A joint between two robotic or bionic members includes at least first and second actuators such as piston-cylinder assemblies connected between the members. A hydraulic circuit includes a sensor subsystem for sensing the magnitude of the load on the piston-cylinder assemblies and/or members. A fluid supply system includes an actuatable control valve operable to supply fluid to one or both piston-cylinder assemblies. A control circuit is responsive to the sensor and is configured to electronically control the fluid subsystem to supply fluid to the first piston-cylinder assembly when the sensor subsystem senses a load below a predetermined magnitude and to supply fluid to both piston-cylinder assemblies when the sensor subsystem senses a load above the predetermined magnitude. Co-inventor: Aaron Saunders
Its working robots now
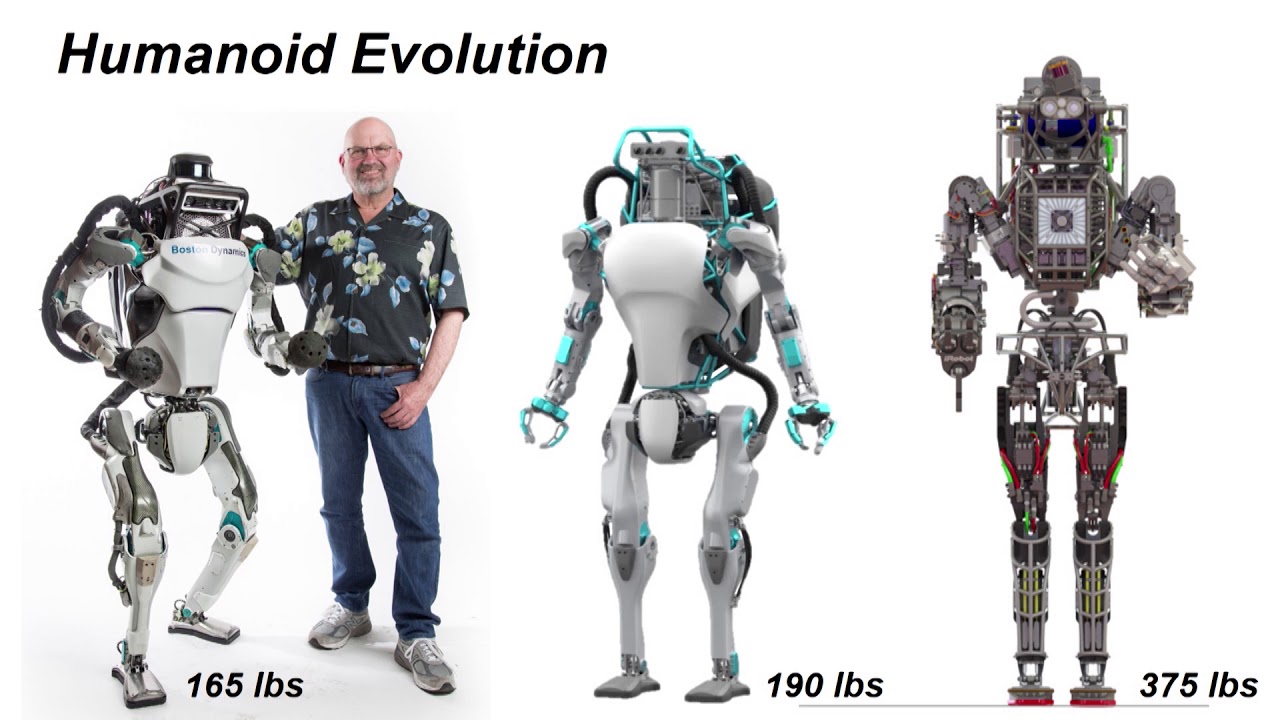
His first invention 375lbs and present 165lbs are shown.
1.2 Robot apparatus and method for controlling jumping of robot device
U.S. Patent 6,484,068 Robot apparatus and method for controlling jumping of robot device, Issued: November 19, 2002.
A robot apparatus that is able to perform jumping. In a leg structure 110 of the robot apparatus, connecting bars 113, 114 and pivots 112a to 112d constitute a four-point link mechanism. A rod 117 is inserted into an opening formed in the distal end of a leg part 116. A coil spring 118 as an elastic member is provided between one end of the rod 117 and the distal end of the leg part 116. A bar member 120 is connected and secured to a preset point of a connecting member 115 as a knee joint. The coil spring 118 is extended/contracted by the stretching/contraction of the connecting member 115. By the operation of the four-point link mechanism, the trajectory of the distal end of the leg part is linear. The coil spring 118 is mounted at a position such that the distance between a driving shaft 101 and the distal end of the bar member 120 has a substantially linear relationship with respect to the force virtually operating between a driving shaft 101 and the distal end of the bar member 120. Co-inventors: Takashi Yamamoto, Martin de Lasa, Shervin Talebinejad, Darrin Jewell, Robert Playter
-
In fiction
Several of the MIT Leg Lab robots appear in the movie Rising Sun.
-
Appearances
Raibert was a keynote speaker at the 2016 Congress of Future Science and Technology Leaders.
On May 11, 2018 Marc Raibert took part in TechCrunch Sessions: Robotics 2018 where he spoke about the SpotMini robot that Boston Dynamics will begin to sell in 2019.

Marc Raibert is one of his inventions.
In April 2019, Raibert spoke at the TechCrunch Sessions: Robotics 2019, where he presented the newest uses for the SpotMini robot.[9]
References:
-
Raibert, Marc (1986). Legged Robots that Balance. MIT Press. ISBN 0-262-68119-6. -
"Marc Raibert". www.ai.mit.edu. -
Stone, Brad; Clark, Jack. "Google Puts Boston Dynamics Up for Sale in Robotics Retreat". Bloomberg.com. -
Lunden, Ingrid. "SoftBank is buying robotics firms Boston Dynamics and Schaft from Alphabet | TechCrunch". TechCrunch. -
https://techcrunch.com/2018/05/11/boston-dynamics-will-start-selling-its-dog-like-spotmini-robot-in-2019/
Словарь:
| Appearances bipedal quadrupedal subsystem piston-cylinder hydraulic supply fluid configured Co-inventor responsive driving shaft substantially relationship between ability excited subsystem actuator fluid load below mounted force Several keynote distal newest uses | Внешность двуногая четвероногая подсистема поршнево-цилиндровая гидравлическая система подачи жидкости сконфигурирована Соавтор изобретателя отзывчивый приводной вал существенно влияет на зависимость между способностью возбуждаемой подсистемы привода жидкостной нагрузкой ниже установленной силы Несколько основных дистальных новейших применений |
Перевод:
Марк Райберт (родился 22 декабря 1949 года) - основатель, бывший генеральный директор
, а ныне председатель Boston Dynamics, робототехнической компании, известной созданием BigDog, Atlas, Spot и Handle. До начала работы в Boston Dynamics Райберт был профессором электротехники и компьютерных наук в Массачусетском технологическом институте и ассоциированным профессором компьютерных наук и робототехники в Университете Карнеги-Меллона. В КМУ он основал Лабораторию Опора (1980), которая помогла создать научную основу для высокодинамичных роботов. Райберт разработал первые самобалансирующиеся прыгающие роботы, что стало значительным шагом вперед в робототехнике. Райберт получил степень бакалавра электротехники в Северо-Восточном университете в 1973 году и степень доктора философии в Массачусетском технологическом институте в 1977 году. Его диссертация называется "моторное управление и обучение по модели пространства состояний". Райберт является членом Национальной инженерной академии.
Райберт мечтает развить двуногую и четвероногую робототехнику до сверхъестественного состояния. Boston Dynamics была приобретена компанией Google в декабре 2013 года. По поводу приобретения Райберт отметил, что он был "возбужден Энди Рубином и способностью Google мыслить очень, очень масштабно... с ресурсами, чтобы это произошло ". в марте 2016 года Google начала предлагать Boston Dynamics на продажу. Компания была приобретена SoftBank в июне 2017 года.
-
Патенты, выданные Марку Райберту
1.1 Приводная система
Патент США 8,126,592 на систему привода, выданный: февраль 28, 2012
Подсистема привода предпочтительно для робота или бионической связи. Соединение между двумя роботизированными или бионическими элементами включает по меньшей мере первый и второй исполнительные механизмы, такие как узлы поршень-цилиндр, соединенные между элементами. Гидравлический контур включает в себя сенсорную подсистему для определения величины нагрузки на поршнево-цилиндрические узлы и / или элементы. Система подачи жидкости включает в себя исполнительный регулирующий клапан, работающий для подачи жидкости в один или оба поршневых цилиндрических узла. Схема управления реагирует на датчик и сконфигурирована для электронного управления подсистемой текучей среды подачей текучей среды в первый узел поршень-цилиндр, когда подсистема датчика воспринимает нагрузку ниже заданной величины
, и подачей текучей среды в оба узла поршень-цилиндр, когда подсистема датчика воспринимает нагрузку выше заданной величины. Соавтор изобретения: Аарон Сондерс
1.2 Роботизированное устройство и способ управления прыжком роботизированного устройства
Патент США 6,484,068 на роботизированние устройства и способ управления прыжками роботизированного устройства, выданный: 19 ноября 2002 г.
Робот-аппарат, способный выполнять прыжки. В ножной конструкции 110 роботизированного аппарата соединительные стержни 113, 114 и шарниры 112а - 112d образуют четырехточечный шарнирный механизм. Стержень 117 вставляется в отверстие, образованное в дистальном конце ножной части 116. Спиральная пружина 118 в качестве упругого элемента предусмотрена между одним концом стержня 117 и дистальным концом ножной части 116. Стержневой элемент 120 соединен и закреплен в заданной точке соединительного элемента 115 в виде коленного сустава. Спиральная пружина 118 вытягивается сжимается за счет растяжения / сжатия соединительного элемента 115. При работе механизма четырехточечного звена траектория дистального конца ножной части линейна. Спиральная пружина 118 установлена в таком положении, что расстояние между ведущим валом 101 и дистальным концом стержневого элемента 120 имеет существенно линейное отношение по отношению к силе, фактически действующей между ведущим валом 101 и дистальным концом стержневого элемента 120. Соавторы: Такаши Ямамото, Мартин де Ласа, Шервин Талебинеджад, Даррин Джуэлл, Роберт Плейтер
-
В художественной литературе
Несколько роботов из лаборатории MIT Leg появляются в фильме "Восходящее солнце".
-
Появление
Райберт был основным докладчиком на Конгрессе будущих лидеров науки и техники 2016 года.
11 мая 2018 года Марк Райберт принял участие в TechCrunch Sessions: Robotics 2018, где рассказал о роботе SpotMini, который Boston Dynamics начал продавать в 2019 году.
В апреле 2019 года Райберт выступил на TechCrunch Sessions: Robotics 2019, где представил новейшие возможности использования робота SpotMini.