Добавлен: 21.10.2018
Просмотров: 1735
Скачиваний: 4
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
1/28
Оглавление
Введение
1. Оформление пояснительной записки и чертежей
2. Математическое описание автоматизированной системы
2.1. Определение параметров объекта автоматизации при активном эксперименте
2.2. Алгоритмы функционирования регуляторов. Расчет и выбор настроек регуляторов
3. Проектирование исполнительных механизмов
3.1. Принципы управления исполнительными системами
3.2. Постановка задачи синтеза системы управления
3.3. Синтез электромеханического модуля методом амплитудно-частотных характеристик
3.4. Статический расчет ЭММ
4. Ход работы курсового проекта на примере АСР уровня
раствора в баке
Приложение 1 Варианты заданий
Приложение 2 Параметризация моделей второго порядка по переходной характеристике
Список рекомендуемой литературы
Введение
Одним из главных средств интенсификации современной экономики является концентрация ресурсов на
важнейших направлениях научно-технического прогресса, к которым отнесена и комплексная автоматизация
производства. Автоматиза ция современного производства основана
на
использование
гибких
производственных систем, автоматических линий, станков с ЧПУ, промышленных роботов и эффективного
применения современных программных средств и компьютерных систем управления. Создание
конкурентоспособной продукции, пользующейся спросом на мировом рынке, неизбежно связано с
интенсификацией технологических процессов, с разработкой специального оборудования, оснащенного
системами управления.
Характерные особенности современного этапа автоматизации будут состоять в том, что она должна
опираться на революцию в электронно-вычислительной технике, на самое широкое использо вание мини- и
микро-ЭВМ, а также на быстрое развитие робото техники и мехатронных устройств.
Применение современных средств и систем автоматизации по зволяет решать следующие задачи:
·
вести процесс с производительностью, максимально достижи мой для данных производительных сил,
автоматически учитывая непрерывные изменения технологических параметров, свойств ис ходных материалов
и полуфабрикатов, изменений в окружающей среде, ошибки операторов;
·
управлять процессом, постоянно учитывая динамику производ ственного плана для номенклатуры
выпускаемой продукции путем оперативной перестройки режимов технологического оборудования,
перераспределения работ на однотипном оборудовании и т.п.;
·
автоматически управлять процессами в условиях, вредных или опасных для человека.
Общая структура разрабатываемого курсового проекта включает в себя введение и разделы: научно-
исследовательский (теоретическое обоснование, экспериментальная часть, применение ЭВМ, патентный
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
2/28
поиск), основной раздел по проектированию автоматизированных систем, а также выводы и ре комендации,
список литературы. Введение как раздел проекта составляется после разработки всех частей проекта.
Если проект связан с решением многосторонней инженерной за дачи на уровне технического
проектирования, то следует отметить реальность проекта. Желательно привести ожидаемый технико-эко-
номический эффект осуществления проекта. Если в проекте предло жены разработки на уровне изобретений,
новизна которых под тверждена авторскими свидетельствами, то следует указать их но мера и дату выдачи.
Объем рукописного текста введения не должен превышать пять страниц.
1. Оформление пояснительной записки и чертежей
Требования к оформлению пояснительной записки.
1. Все стра ницы записки должны быть одинакового размера 210
´ 297 мм (формат А4). Рукопись пишут
на одной стороне листа чернилами или пастой.
2. Расстояние от границ листа до границ текста следует оста влять: слева — 20...25 мм, вверху и внизу —
5...10 мм, справа — не менее 5 мм.
3. План записки должен соответствовать последовательной работе над проектом. Заголовки разделов
должны иметь поряд ковые номера, обозначенные арабскими цифрами. Подразделы должны иметь двузначную
нумерацию в пределах каждого раз дела. Подразделы могут иметь несколько пунктов.
Например:
1. Исходные данные для проектирования.
2. Определение основных параметров автоматизированной системы.
2.1. Алгоритмы функционирования регуляторов.
2.2. Расчет и выбор настроек регуляторов и т.д.
4. Расчетные формулы записывают в буквенных обозначениях с экспликацией, в которой приводят
наименование каждой вели чины, входящей в формулу, и единицу СИ:
правильно
где
— приведенный момент,
;
— сила сопротивле ния, Н; l
1
— радиус кривошипа, м;
—
отношение линейных скоростей точек С и В;
неправильно правильно
;
.
Затем в формулу подставляют необходимые числовые значения и приводят результат вычислений с
указанием единицы СИ, например:
Формулы нумеруются, если в записке необходимо делать ссылки. Нумерацию целесообразно указывать
в пределах опреде ленной главы (например, 1.5; 3.2 и т.п.).
5. Буквенные обозначения единиц СИ, входящих в произведе ние, следует отделять точками на средней
линии строки, напри мер Н·м. При применении буквенных обозначений единиц СИ в виде отношений должна
применяться только одна косая или горизонтальная черта, например:
правильно
неправильно
При применении косой черты обозначения единиц СИ в чис лителе и знаменателе следует помещать в
строку, а произведение в знаменателе следует заключать в скобки, например
;
.
6. Задание функций и результаты решения уравнения с боль шим объемом числовых данных
рекомендуется приводить в за писке в виде таблиц. Каждая таблица должна иметь заголовок, отражающий


13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
3/28
содержание таблицы, а также заголовки боковиков и граф.
7. Небольшой по объему цифровой материал удобнее оформ лять в строку (колонки разделяются не
линейками, а пробелами).
8. Основной текст записки должен быть кратким, четким, но достаточным для точного и конкретного
отражения содержания расчетов, графических построений и выводов.
9. Записка должна содержать ссылки на использованную ли тературу, список которой приводят в конце
записки.
10. Все страницы записки брошюруют в обложку и нумеруют. Записка должна иметь титульный лист
установленной формы.
11. В начале записки поместить «Аннотацию» или «Реферат» — краткую ин формацию о содержа нии
записки в виде пе речня главнейших воп росов с выделением ключевых слов.
В «Оглавлении» привести наименование разделов записки с ука занием номеров стра ниц.
12. Текст записки пишется от третьего лица или в безличной форме: например: «определяют», «опре-
деляется», «определе ние». Форма «опреде ляю» недопустима.
13. Реферат должен содержать данные, не обходимые для органи зации машинного банка информации с
описани ем краткого содержа ния записки с подчеркнутыми ключевыми словами, а также указа ния объема и
количества текстовых, табличных и других листов и иллюстраций, используемых при копировании
документов.
Требования к оформлению графиков и схем. При оформлении структурных, функциональных,
принципиальных схем, схем автоматизации и чертежей необходимо руководствоваться ГОСТами ЕСКД 2.701–
68, 2.721–74, 2.743–72, 2.747–68, 2.750–68, 2.751–73. На каждом листе работы в правом нижнем углу должна
быть основная надпись по ГОСТ 2.104–68. Несоблюдение требований ЕСКД и ЕСПД оформлении
иллюстраций говорит об их незнании, что приводит к снижению оценки за курсовой проект.
На каждом листе проекта в правом нижнем углу должна быть основная надпись по ГОСТ 2.104–2006.
Организация защиты проекта. Курсовой проект при оконча тельном оформлении подписывают студент
и руководитель про екта. В процессе защиты студент кратко излагает назначение и принцип работы машины
или установки и особенности принятых решений при исследовании и проектировании автоматизированной
системы. В процессе обсуждения студент должен показать, что он овладел общими методами синтеза
элементов автоматизированной системы, получил навыки выполнения конкретных расчетов, владеет
аналитическими и численными методами исследования средств автоматизации, может обосно вать
целесообразность принятия конкретных решений при проек тировании автоматизированных систем.
Защита курсового проекта проходит в комиссии в составе трех преподавателей, по ходу защиты ведется
протокол заседания.
2. Математическое описание автоматизированной системы
2.1. Определение параметров объекта автоматизации при активном эксперименте
При активном эксперименте на объект исследования действуют типовые входные сигналы, т.е.
ступенчатые, импульсные или гар монические воздействия.
Соответственно этим воздействиям опре деляются:
·
временные характеристики (кривые разгона),
·
время - им пульсные,
·
частотные характеристики.
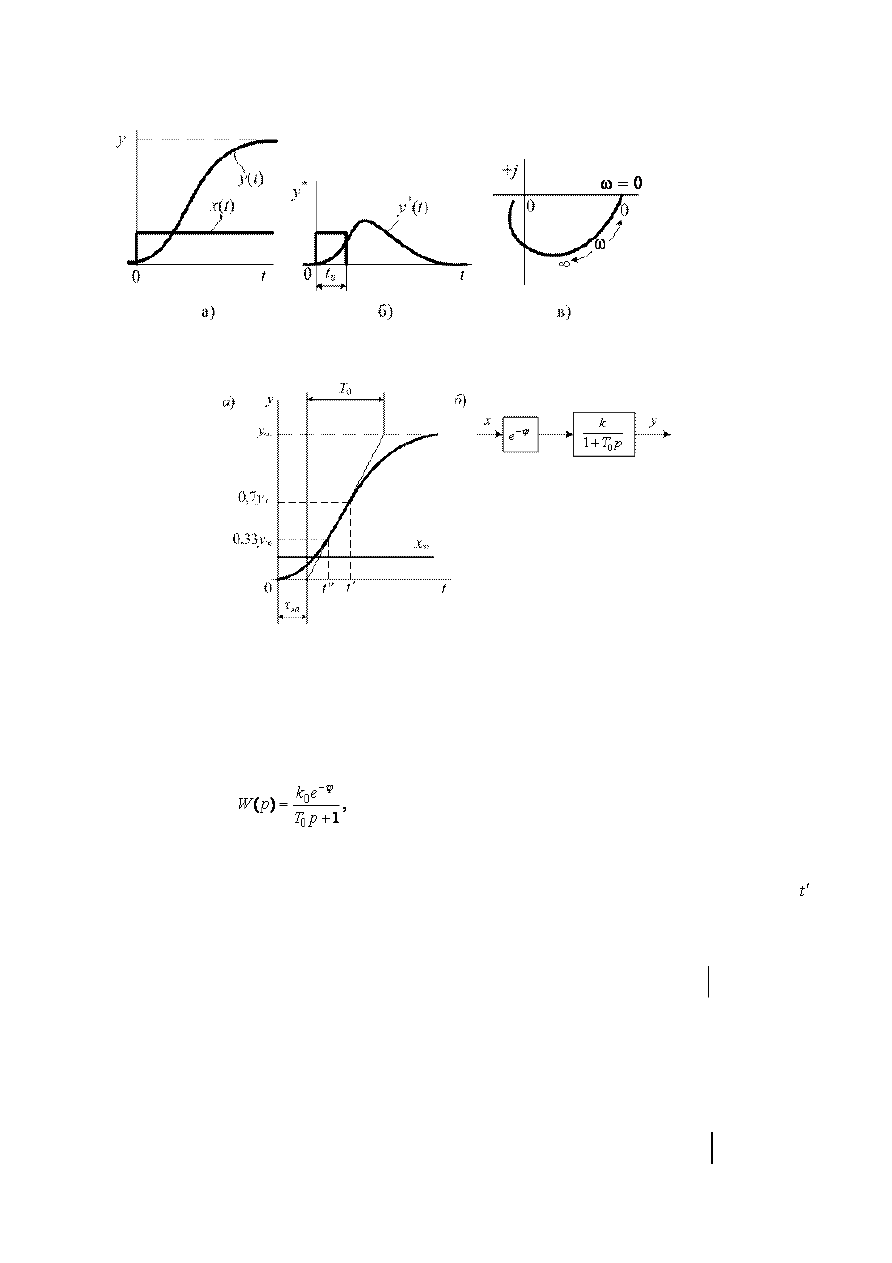
Для объектов управления с самовыравниванием указанные характеристики приведены соот ветственно
на рис. 1, а, б, в.
Величина ступенчатого воздействия, как правило, составляет 5...20% от номинального входного
сигнала.
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
4/28
При определении параметров объектов управления по экспери ментальным данным в большинстве
случаев оказывается возможным приближенно оценивать свойства объектов тремя параметра ми:
коэффициентом усиления k
0
, постоянной времени Т
0
и време нем запаздывания τ.
Рис. 1. Динамические
характеристики объекта с самовыравниванием:
а — временная; б — время-импульсная; в — амплитудно-фазовая
Рис. 2. Определение по экспериментальной временной характеристике параметров (а) и структуры (б) объекта
управления
Если известна временная характеристика объекта (рис. 2, а), то структура и параметры объекта
определяются
заменой
дейст вительной
характеристики
эквивалентной,
состоящей
из
участка запаздывания и экспоненты с постоянной времени Т
0
, подобран ными так, чтобы аппроксимирующая
характеристика наилучшим образом воспроизводила действительную временную характери стику.
Передаточная функция такого объекта управления
(1)
а его структурная схема показана на рис. 2, б.
Более точную аппроксимацию временной характеристики мож но получить, если τ и Т
0
рассчитывать
следующим образом: на временной характеристике (рис. 2, а) сначала определить мо менты времени при
у
= 0,7у(∞) и t" при у = 0,33у(∞), а затем вычислить параметры объекта по формулам
τ
= 0,5(3t″ - t′); T
0
= 1,25(t′ - t″) (2)
Связь выхода в установившемся режиме y(∞) от входа х(∞) выражается через коэффициент усиления
k
0
= y(∞)/х(∞) (3)
Если замена сложного дифференциального уравнения объекта более простым неприемлема, то для
определения коэффициентов дифференциального уравнения и его порядка без участка запаз дывания
пользуются графо-аналитическим методом площадей (метод Симою). Этот метод легко программируется
для ЭВМ и программа занимает весьма малый объем памяти. При наличии более точного математического
описания объекта, полученного с использованием метода площадей, можно осуществить синтез структуры
корректирующих устройств (регуляторов) и получить автоматическую систему высокого качества.
2.2. Алгоритмы функционирования регуляторов. Расчет и выбор настроек регуляторов
Автоматические регуляторы по своим динамическим свойствам подразделяются на линейные и
нелинейные. При проектировании АСР с линейными регуляторами используют П, И, ПИ, ПД и ПИД
13.10.2018
Содержание
https://dec.cdo.vlsu.ru/pluginfile.php/13674/mod_resource/content/0/Yearly_project/KP.htm
5/28
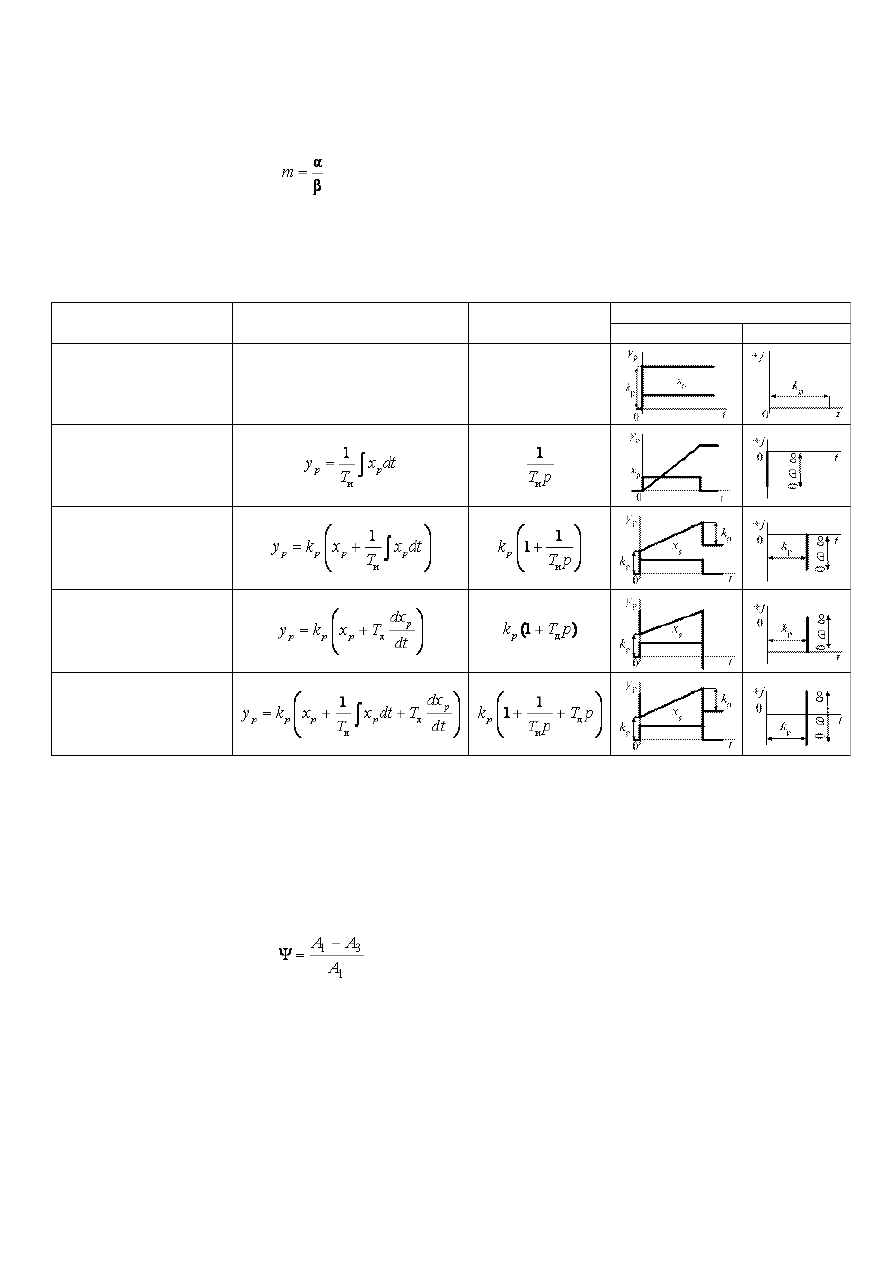
алгоритмы регулирования. Уравнения, передаточные функ ции, временные и частотные характеристики
линейных регуляторов приведены в табл.1. Необходимым условием надежной устой чивой работы АСР
является правильный выбор типа регулятора и его настроек, гарантирующий достаточный запас устойчивости
и требуемое качество регулирования.
В качестве количественных мер запаса устойчивости исполь зуют степень колебательности
, (4)
где α и β — действительная и мнимая части наиболее «опасного» полюса передаточной функции замкнутой
АСР соответственно (рис 3,а)
Таблица 1
Передаточные функции, временные и частотные характеристики линейных регуляторов
Тип регулятора
Уравнение
Передаточная
функция
Характеристика
временная
частотная
Пропорциональный
(статический)
y
p
=k
p
x
p
k
p
Интегральный
(астатический)
Пропорционально –
интегральный
(изодромный)
Пропорционально –
дифференциональный
Пропорционально –
интегрально –
дифференциональный
Наиболее опасным считается полюс с наименьшим значением т. Для границы устойчивости т
= 0.
Показатель колебательности М определяется по величине максимума амплитудно-частотной характеристики
(АЧХ) замкнутой АСР (рис. 3,б). Чем больше максимум АЧХ, тем выше колебательность системы. По
переход ным характеристикам замкнутой АСР (рис. 3,а) определяется степень затухания
. (5)
Для АСР на границе устойчивости Ψ
=0.
В целом все три показателя т, М, Ψ являются примерно рав ноценными мерами запаса устойчивости.
Знание одного из них дает информацию о значениях других. Так, например, значениям m —0,2...0,3
соответствуют значения М
= 2,5...1,5 и Ψ ≈ 0,7...0,9.