Файл: Курсовая работа. Исследование релейной следящей системы.docx
ВУЗ: Российский университет дружбы народов
Категория: Курсовая работа
Дисциплина: Теория автоматического управления
Добавлен: 23.10.2018
Просмотров: 1424
Скачиваний: 22
!!!Шаблон
выполнения курсовой работы!!! Использовать
только в качестве примера
Российский Университет Дружбы Народов
Курсовая работа
по курсу: «Теория автоматического управления»
«Исследование релейнойследящейсистемы»
Выполнил:
Группа: ИУБПреподаватель:
Москва. 2010 г
Оглавление
Построение фазовогопортретасистемы 10
Определение амплитуды ичастоты автоколебаний 13
Построение переходных процессовметодомприпасовывания 15
Исследование САР методомгармоническойлинеаризации 16
Определение коэффициентовгармонической линеаризации 16
Исследование автоколебаний методомгармоническойлинеаризации 19
Графическийспособ 19
Аналитическийметод 20
Частотный метод спомощьюАФЧХ 21
Частотный метод спомощьюФГУ 22

Тема курсовой работы
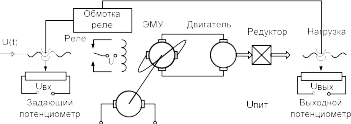
Исследование следящей системы, содержащей датчик угла рассогласования, релейный усилитель напряжений, электромеханический усилитель мощности, исполнительный двигатель иредуктор.
Функциональная схемасистемы:
 Задание
Задание
-
Составить структурную схемуСАР.
-
Произвести исследование САР методом фазовойплоскости:
-
аппроксимировать линейную часть звеном с передаточной функцией графически ианалитически;
kes
 sTs1
sTs1
-
построить фазовый портрет системы и определить амплитуду и частоту автоколебаний; построить фазовые траектории свободного движения при заданных начальных
-
условиях: Х1 = 3b , Х2 =0;
-
построить соответствующие переходныепроцессы;
-
произвести расчет автоколебаний графически ианалитически.
Произвести исследование САР методом гармоническойлинеаризации:
-
найти коэффициенты гармонической линеаризации нелинейного звена и составить выражение его эквивалентного комплексного коэффициентапередачи;
-
найти частотным методом (с помощью АФЧХ и с помощью ЛАХ) амплитуду и частоту предельногоцикла;
-
произвести анализ устойчивости предельных циклов и найти параметрыавтоколебаний;
Произвести анализ вынужденного движения системы.
Произвести сравнительный анализ результатов исследования САР указанными методами.
Исходное данные
Вариант
1
|
Ucp,B |
Uном.дв.,B |
Tэ,c |
Tдв,c |
Кд,вмм |
Kэ |
Кдв,рад сВ |
Кр,мм рад |
|
0.005 |
110 |
0.05 |
0.20 |
0.03 |
24 |
11 |
0.03 |
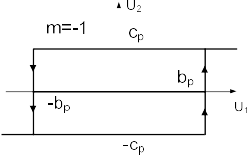
Значение коэффициента возврата: m=-1
Начальные условия: : Х1 = 3b , Х2 = 0;
Структурная схема САР
Составим структурную схему системы автоматического регулирования по имеющейсяфункциональной.

Выражения для передаточных функций отдельных элементов САР.
-
Датчик:
WдKд
-
Реле:
Реле представляет собой нелинейный элемент, и его характеристика задается графически.
-
ЭМУ:
TэU&2tU2tKэU1t
-
Электродвигатель:
Wэs
Кэ

Tэs1
Tдв&t&tKдвU2t
-
Редуктор
WpКр
Wэs
Кдв

sTдвs1

Нелинейный элемент
Параметры нелинейного элемента можно рассчитать по схеме.
bp= Ucp= 0,005 В;
т*bр=- bр=0,005 В;
Напряжение на входе двигателя - это напряжение на выходе реле, усиленное с помощью ЭМУ.
Таким образом, можно записать:Uде=ср•Кэ.Отсюда найдем ср.
Входное напряжение двигателяUдв=110 В. Коэффициент усиления ЭМУ Кэ=24 .
Напряжение на выходе релеcp
Uдв
 Кэ
Кэ
Нелинейный элемент приводится к обобщенному виду с учетом коэффициентов усиления в структурной схеме. Для этого пересчитываем его коэффициенты.
 bbp
bbp
Kд
= 0,167
ccpKэKдвKр= 36,3

Исследуемая система третьего порядка. Для построения фазового портрета необходимо понизить порядок на единицу.
Аппроксимация линейной части
Как и говорилось выше, после всех структурных преобразований мы получили систему третьего порядка. Понизить порядок можно, аппроксимировав колебательное звено последовательным соединением апериодического звена и звена «чистое запаздывание». Таким образом, вместо системы, описываемой передаточной функцией вида:
Wл
'
1
 .
.
sTдвs1Tэs1
es
экв