ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 750
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
1.Строение механизмов
-
Структурный анализ механизмов
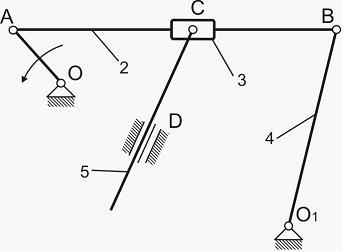
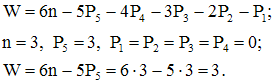
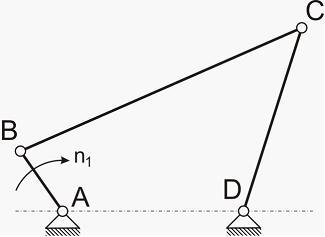
1.На рисунке представлена структурная схема плоского рычажного механизма. Число степеней свободы W равно…
Ответ:
-
нулю -
одному -
двум -
трём
Решение:
Для плоских механизмов используем формулу Чебышева:
При подсчёте количества кинематических пар нужно помнить, что в точке C соединяются три звена, следовательно, там находятся две кинематические пары: (2-3) и (3-5).
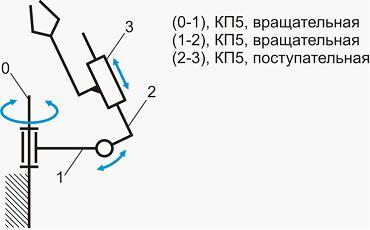
18. На рисунке представлена структурная схема пространственного манипулятора. Число степеней свободы W равно…
Варианты ответа:
трём
шести
четырём
двум
Решение:
Для пространственных механизмов используем формулу Сомова–Малышева:
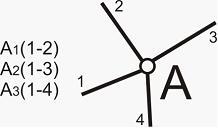
46. Количество кинематических пар в точке А равно…

Варианты ответа:
трём
четырём
двум
одному
Решение:
Если в одной точке соединяется n звеньев, то количество кинематических пар равно n-1; в данном случае
-
Основные понятия ТММ
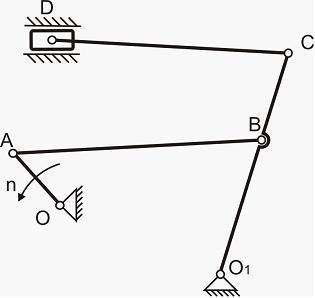
2.На представленной структурной схеме рычажного механизма звенья, начиная с входного и кончая выходным звеном, будут называться….
Ответ:
-
кривошип, шатун, коромысло, кулиса, ползун -
кривошип, ползун, коромысло, кулиса, кривошип -
кривошип, шатун, коромысло, шатун, ползун -
коромысло, шатун, кривошип, кулиса, ползун
Решение:
Правильный ответ: «кривошип, шатун, коромысло, шатун, ползун».
Звено ОА – может совершать полный оборот вокруг неподвижной оси O.
Звенья AB и CD – образует кинематические пары только с подвижными звеньями.
Звено
Звено в т. D – образует поступательную пару с одним звеном (стойка) и вращательную с другим (шатун CD).
34. К рычажным механизмам можно отнести …
Варианты ответа:
мальтийский и храповый механизмы
кулачковый и кривошипно-кулисный механизмы
зубчатый механизм и вариатор
кривошипно-ползунный и синусный механизмы
Решение:
Правильный ответ: кривошипно-ползунный и синусный механизмы.
Строгое определение: рычажный механизм есть механизм, звенья которого образуют только низшие кинематические пары.
Из перечисленных механизмов к рычажным можно также отнести кривошипно-кулисный механизм. Остальные перечисленные механизмы (кулачковый, мальтийский, храповый, зубчатый механизмы, вариатор) имеют в своей кинематической цепи высшую кинематическую пару.
48. Примерами технологических машин являются …
Варианты ответа:
сверлильный станок, пресс, бензопила
элеватор, прокатный стан, механические часы
генератор, электродвигатель, паровая турбина
арифмометр, фрезерный станок, токарный станок
Решение:
Правильный ответ: сверлильный станок, пресс, бензопила.
К технологическим машинам относят машины, которые посредством механической энергии изменяют форму, свойства и состояние предмета.
Арифмометр, механические часы – информационные машины, предназначенные для получения и/или преобразования информации.
Элеватор – транспортная машина, предназначенная для перемещения предмета.
Генератор, электродвигатель, паровая турбина – энергетические машины, предназначенные для преобразования любого вида энергии в механическую энергию и наоборот.
Фрезерный станок, токарный станок, прокатный стан – технологические машины.
-
Кинематические пары, кинематические цепи
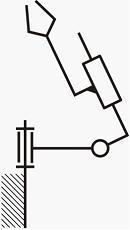
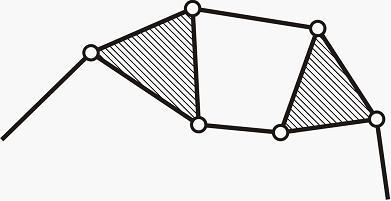
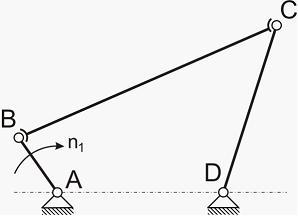
3. Кинематическая цепь, представленная на рисунке, является…
Ответ:
-
плоской, незамкнутой, сложной -
пространственной, замкнутой, сложной -
плоской, незамкнутой, простой -
плоской, замкнутой, простой
Решение:
Звенья кинематической цепи движутся в параллельных плоскостях; кинематическая цепь имеет звенья, которые вступают только в одну кинематическую пару; кинематическая цепь содержит структурную группу 4-го класса, следовательно, эта цепь плоская, незамкнутая, сложная.
17. К низшим кинематическим парам можно отнести…
Варианты ответа:
сферическую и точечную
вращательную и сферическую
вращательную и линейную
линейную и точечную
Решение:
Правильный ответ: вращательную и сферическую.
Низшая пара (Lover pair) – сопряжение, элементом которого является поверхность.
У линейной и точечной кинематических пар элементом сопряжения является соответственно линия и точка.
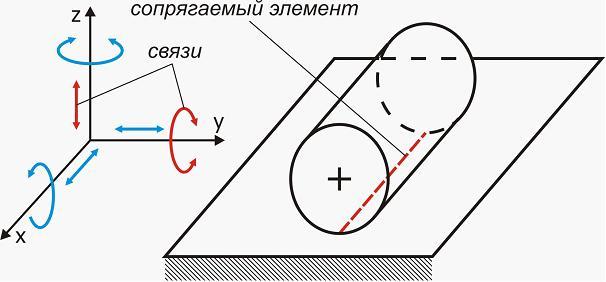
35. Линейная кинематическая пара имеет…
Варианты ответа:
одну связь и пять степеней свободы
две связи и четыре степени свободы
одну связь и четыре степени свободы
две связи и шесть степеней свободы
Решение:
Линейная кинематическая пара имеет четыре степени свободы (две вращательных и две поступательных) и две связи (одну вращательную и одну поступательную).
Сумма числа степеней свободы и числа связей в кинематической паре всегда равна шести.
-
Структурные группы звеньев. Структурный синтез
4. На рисунке представлена структурная схема кривошипно-коромыслового механизма. Количество избыточных связей q равно…
Ответ: 3,0,2,1
Решение:
Используем формулу для подсчёта количества избыточных связей плоских механизмов:
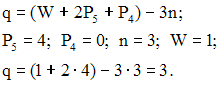
И действительно, для устранения избыточных связей можно вращательные кинематические пары в точках B и C заменить на сферические. В таком случае мы получим кривошипно-коромысловый механизм с местной подвижностью шатуна и отсутствием избыточных связей.

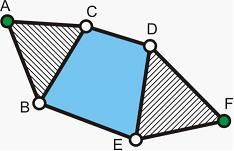
19. Класс и порядок структурной группы равен…
Варианты ответа:
2 и 4
4 и 2
4 и 6
6 и 4
Решение:
Данная структурная группа имеет четыре стороны замкнутого контура BCDE (отмечено синим), следовательно, относится к 4-му классу. Также структурная группа имеет два элемента сопряжения кинематической пары A и F (отмечено зелёным), следовательно, имеет 2-й порядок.
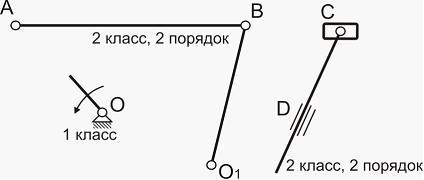
42. Класс сложности механизма равен…

Варианты ответа:
двум
одному
трём
нулю
Решение:
Класс сложности механизма определяется наивысшим классом, входящих в его состав структурных групп. Данный механизм состоит из двух структурных групп второго класса и одной группы первого класса (первичный механизм).
1. ... механизм — это механизм, все подвижные звенья которого описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях
-
пространственный
2. ... Механизм — это механизм, все подвижные звенья которого описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях
3. Движение для приведения в движение других звеньев механизма сообщается ... звену
-
входному
4. ... — это звено плоского рычажного механизма, совершающего вращательное движение
-
кривошип
5. ... — это звено плоского рычажного механизма, совершающего поступательное движение
-
ползун
6. Движение для приведения в движение других звеньев механизма сообщается ... Звену
-
входному
7. Механизмы с высшими кинематическими парами превосходят механизмы с низшими кинематическими парами ...
-
большей точностью преобразования движения
8. Звенья высшей кинематической пары соприкасаются …
-
по линии -
в точке
9. Звенья низшей кинематической пары соприкасаются ...
-
по поверхности
10. ... механизм — это механизм, все подвижные звенья которого описывают траектории, лежащие в одной плоскости
-
плоский
11.Число степеней свободы плоского рычажного механизма определяют по формуле ...
-
Чебышева
12.Плоский рычажный механизм, структурная формула которого имеет вид I →III → II1, — это механизмом .... класса
-
3 его
13.Кинематическая пара, имеющая одну связь, — это ... пара
-
пятиподвижная
14.Кинематическая пара, имеющая две связи, — это … пара
-
четырехподвижная
15.Кинематическая пара, имеющая три связи, — это ... пара
-
трехподвижная
16.Кинематическая пара, имеющая четыре связи, — это ... пара
-
двухподвижная
17.Кинематическая пара, имеющая пять связи, — это ... пара
-
одноподвижная
18. Формула Чебышева для расчета плоского механизма имеет вид …
-
∆W = 3n – (2pн + pв) + q
19. Формулой строения вида
I → IV→III→ II обладает механизм ...класса.
-
4-го
20. Степень подвижности структурной группы Ассура первого класса равна ...
-
0
21. Степень подвижности структурной группы Ассура второго класса равна ...
-
0
22. Признаки классификации кинематических пар — это ...
-
число степеней свободы
23. Степень подвижности механизма первого класса равна ....
-
1
24. Степень подвижности структурной групп Ассура первого класса равна ....
-
0
25. Механизм статически определен, когда избыточные связи q удовлетворяют условию ...
-
q =0
26. Степень подвижности механизма первого класса равна ... .
-
1
27. Степень подвижности группы Ассура равна ... .
-
0
28. Число звеньев n в группе Ассура и число кинематических пар пятого класса