Добавлен: 08.11.2023
Просмотров: 1446
Скачиваний: 6
СОДЕРЖАНИЕ
Проблема охраны территорий от малогабаритных БПЛА
Обзор известных методов решения проблемы
Постановка задачи проектирования системы управления охранного квадрокоптера
Характеристики центрального процессора (CPU)
Барометрический датчик давления
Электронный регулятор скорости (ESC)
Принцип работы датчика с оптическим потоком
Результат сборки квадрокоптера
Программная среда Robot Operating System
Алгоритм управления автономным полетом охранного квадрокоптера
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Продолжительность этапов работ
Расчет сметы затрат на выполнение проекта
Расчет затрат на электроэнергию
Расчет затрат на социальный налог
Расчет прочих (накладных) расходов
Безопасность в чрезвычайных ситуациях
Особенности законодательного регулирования проектных решений
Список используемых источников
-
Вторичный инерционный измерительный блок
Также имеется инерционный блок измерения (IMU), выпускаемый InvenSense (номер детали MPU 6000). Микросхема оснащена трехосевым гироскопом и акселерометром.
Спецификации акселерометра идентичны модулю eCompass и служат главным образом в качестве вторичного отказоустойчивого оборудования. Гироскоп имеет полные диапазоны шкалы +/- 250, 500 и 1000. [9]
-
Аналого-цифровой преобразователь
Аналого-цифровой преобразователь (АЦП) представляет собой 8- канальный 3,3 В, 12-разрядный чип. Двенадцать бит приводит к 4096 потенциальным целочисленным значениям для ввода, что означает, что каждое значение бита представляет собой разность напряжений 0,0008 вольт. Поскольку Pixhawk работает на стандартном питании 5 В, вывод 6,6 В не может получать максимальное напряжение, тем самым уменьшает его общее разрешение.
- 1 2 3 4 5 6 7 8 9 10 ... 35
Барометрический датчик давления
Барометр (номер детали MS5611) - это датчик высокого разрешения, выполненный специалистами по измерениям. Этот барометрический датчик давления оптимизирован для высотомеров с разрешением высоты 10 см. Он имеет цифровое разрешение 24 бит для значений давления и температуры. Микросхема также имеет встроенное цифровое преобразование и последовательные соединения I2C и SPT, в дополнение к процедуре компенсации температуры второго порядка. [9].
-
Зуммер и переключатель постановки на охрану
Зуммер работает вместе с многоцветовым светодиодом Pixhawk для передачи информации о состоянии системы. Он детектирует конкретные проблемы, обнаруженные в предполетных проверках.
 Переключатель постановки на охрану служит дополнительной защитой для коптера. После завершения всех предполетных проверок Pixhawk будет мигать либо синим светом, не сигнализирующим о приеме GPS, либо зеленым светом, указывающим прием GPS. После нажатия на кнопку коптером можно управлять. [9] Зуммер и переключатель постановки на охрану показаны на рисунке 2.4.
Переключатель постановки на охрану служит дополнительной защитой для коптера. После завершения всех предполетных проверок Pixhawk будет мигать либо синим светом, не сигнализирующим о приеме GPS, либо зеленым светом, указывающим прием GPS. После нажатия на кнопку коптером можно управлять. [9] Зуммер и переключатель постановки на охрану показаны на рисунке 2.4.Рисунок 2.4 – Зуммер и переключатель постановки на охрану
-
Регулятор напряжения
Регулятор напряжения и монитор по умолчанию позволяют пользователю подключать батарею 4S LiPo через соединение XT60, которое
обеспечивает Pixhawk постоянным источником питания 5 В. Этот XT60 также отслеживает выносливость и уровни заряда батареи во время полета. Данный регулятор показан на рисунке 2.5.

Рисунок 2.5 – Регулятор напряжения XT60
-
Рама квадрокоптера
Рама является одним из основных строительных блоков каждого мультикоптера. Она показана на рисунке 2.6. Она необходима, так как все компоненты крепятся к раме. Существуют разные варианты рам. Они варьируется в размере, весе и количестве плеч. Например, для квадрокоптера рама будет выглядеть по-другому и иметь другие свойства, чем у октокоптера. Данный элемент является пассивным. Она не оказывает положительного влияния на продолжительность полета, поэтому для данного компонента используются материалы, обеспечивающие прочность рамы с наименьшим весом. Используются такие материалы, как углерод, пластик, бальза, алюминий или авиационный сплав. Материалы различны в цене. Мультикоптеры для исследовательских целей используют в основном пластик. Большие коптеры, которые несут более существенную нагрузку, такие как камера, используют углерод.

Рисунок 2.6 – Рама квадрокоптера
Размер рамы обычно обозначается числом, таким как 150, 200, 450 и т. д. Это число представляет собой диагональную длину в миллиметрах от
двигателя к двигателю.
Для нашего проекта мы выбрали популярную пластиковую раму размером 450 мм, показанную на рисунке 2.6. Она отличается достаточной прочностью и приемлемой ценой.
- 1 ... 4 5 6 7 8 9 10 11 ... 35
Электродвигатель
В основном коптеры используют коллекторные и бесколлекторные двигатели постоянного тока. Данные типы двигателей показаны на рисунке 2.7.
Коллекторные двигатели имеют щеточно-коллекторный узел. Коллектор – это контакты обмоток, расположенных на роторе, а щётка выполняет функцию скользящего контакта, расположенного на статоре. Коллекторный узел сильно уменьшает ресурс мотора, так как создаётся трение. Вращение двигателя начинается при подаче на него постоянного тока. Направление вращения двигателя зависит от полярности поданного напряжения.
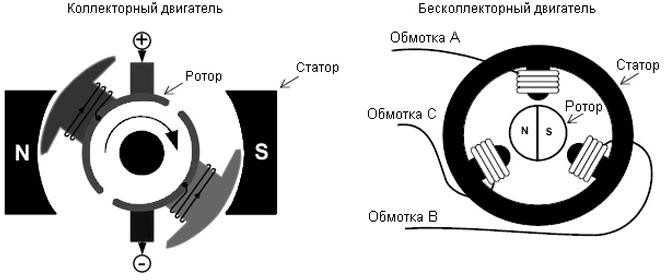
Рисунок 2.7 – Типы двигателей постоянного тока
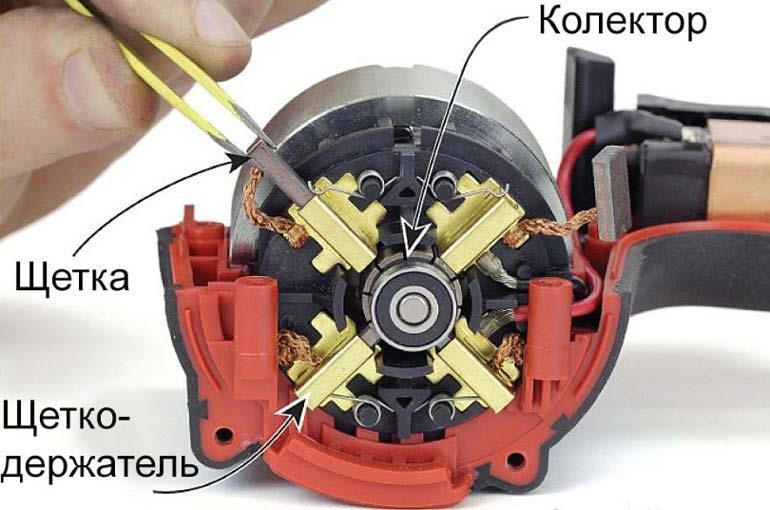
Коллекторный двигатель, показанный на рисунке 2.8, обладает следующими преимуществами:
-
минимальный вес и размер двигателя; -
низкая стоимость; -
прост в обслуживании и ремонте.
Также данный тип двигателей имеет недостатки:
-
низкий коэффициент полезного действия; -
сравнительно низкая скорость вращения; -
быстрый перегрев; -
 быстрый износ.
быстрый износ.
Рисунок 2.8 – Коллекторный двигатель с щеточным узлом Бесколлекторные двигатели состоят из ротора с постоянными
магнитами и статора с обмотками. Направление вращения зависит от очередности фаз. Данный тип двигателя резко стартует и быстро