Добавлен: 08.11.2023
Просмотров: 1435
Скачиваний: 6
СОДЕРЖАНИЕ
Проблема охраны территорий от малогабаритных БПЛА
Обзор известных методов решения проблемы
Постановка задачи проектирования системы управления охранного квадрокоптера
Характеристики центрального процессора (CPU)
Барометрический датчик давления
Электронный регулятор скорости (ESC)
Принцип работы датчика с оптическим потоком
Результат сборки квадрокоптера
Программная среда Robot Operating System
Алгоритм управления автономным полетом охранного квадрокоптера
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Продолжительность этапов работ
Расчет сметы затрат на выполнение проекта
Расчет затрат на электроэнергию
Расчет затрат на социальный налог
Расчет прочих (накладных) расходов
Безопасность в чрезвычайных ситуациях
Особенности законодательного регулирования проектных решений
Список используемых источников
Архитектура системы управления была построена вокруг полетного контроллера Pixhawk с автопилотом PX4. Raspberry Pi 3 является «мозгами» автономного охранного квадрокоптера и использует свои вычислительные
мощности для обмена командами с полетным контроллером. На рисунке 3.1 показана структура системы управления коптером.
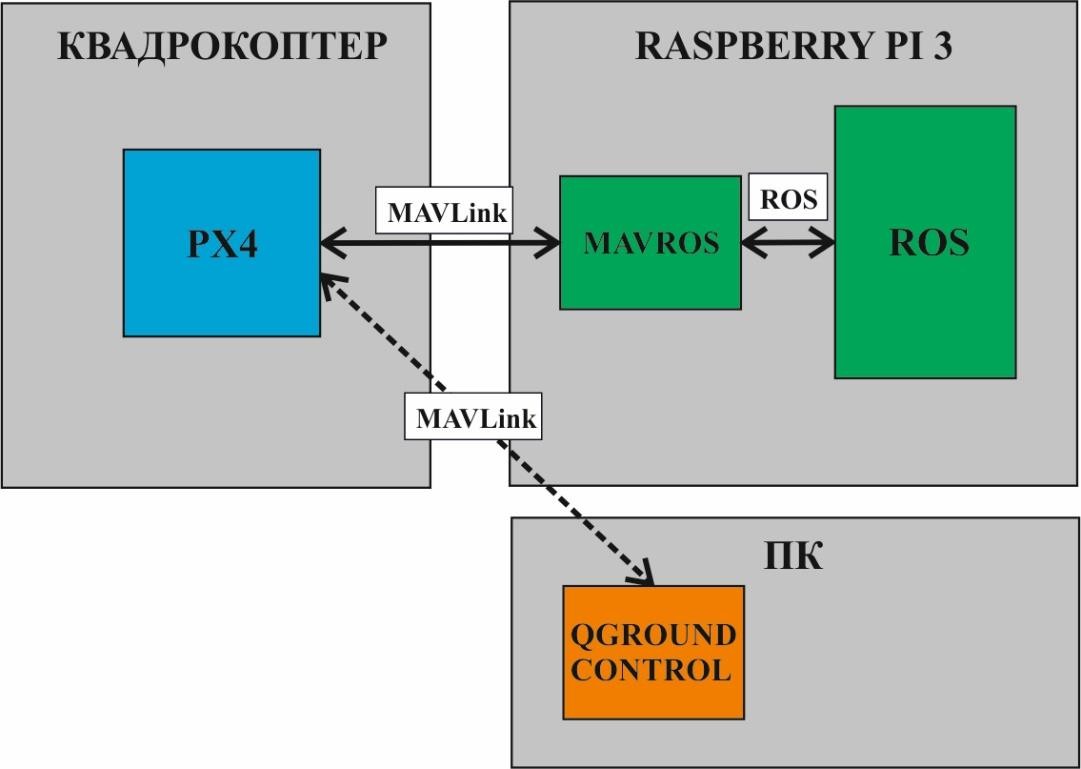
Рисунок 3.1 – Структура системы управления автономного полета охранного квадрокоптера
В структурной схеме представлена программное обеспечение QGroundControl, которое отвечает за первоначальную прошивку полетного контроллера, его настройку и калибровку всех датчиков. Во время автономных полетов в данном программном обеспечении нет необходимости, и поэтому его можно отключить.
Разработанная архитектура системы
управления автономного охранного квадрокоптера имеет такие преимущества как:
-
отсутствует непосредственный доступ к полевому уровню управления системы (датчики, моторы); -
имеет возможности расширения функциональности дрона; -
возможность реализации алгоритмов управления на языках C++, Python; -
большое сообщество разработчиков на ROS и соответственно большое количество дополнительных библиотек.
К недостаткам данной системы можно отнести небольшие задержки между командами для полетного контроллера, связанно это непосредственно с техническими особенностями протокола MAVLink. Данный недостаток некритичен в решении данной задачи.
- 1 ... 10 11 12 13 14 15 16 17 ... 35
Автопилот PX4
Полетный стек PX4 является частью платформы Dronecode, комплексного решения для создания и управления беспилотными летательными аппаратами (БПЛА). Платформа имеет несколько частей:
-
PX4 Flight Stack: система управления полетом (автопилот). -
MAVLink: высокоэффективный, легкий и быстрый инструмент для создания роботизированных коммуникаций. -
QGroundControl: современный, мобильный и настольный пользовательский интерфейс для настройки системы, и выполнения полетов.
PX4 – независимое от платформы программное обеспечение автопилота (или программный стек/прошивка), которые могут летать или управлять беспилотными летательными аппаратами или наземными транспортными средствами (БПЛА/UGV). Он загружается на некоторые платы управления транспортными средствами, а вместе с наземной станцией управления создают комплексное решения для автопилота.
Станция наземного управления PX4 называется QGroundControl и является неотъемлемой частью системы автопилота PX4. QGroundControl может работать в Windows, OS X или Linux. На рисунке 3.2 показано рабочее окно программы. С помощью QGroundControl загружается прошивка PX4 на полетный контроллер квадрокоптера, производится настройка коптера, изменяются различные параметры, отображается полетная информация в реальном времени. [15]

Рисунок 3.2 – Рабочее окно программы QGroundControl
PX4 можно управлять с отдельного компьютера компаньона, установленного непосредственно на квадрокоптер. Подключается он через
последовательный кабель или Wi-Fi.
В режимах полета предусмотрены различные типы/уровни автоматизации автомобиля и автопилота для пользователя (пилота). Автономные режимы полностью контролируются автопилотом и не требуют ввода пилот-сигнала/дистанционного управления. Они используются, например, для автоматизации общих задач, таких как взлет, возврат в исходное положение и посадку. Другие автономные режимы выполняют запрограммированные миссии, следуют маяку GPS или принимают команды от бортового компьютера или наземной станции.
Ручные режимы контролируются пользователем (с помощью ручек управления джойстика) или с помощью автопилота. Различные режимы ручного управления позволяют использовать различные характеристики полета – например, некоторые режимы позволяют акробатические трюки, в то время как другие невозможно переворачивать и удерживать положение/курс от ветра.
PX4 имеет настраиваемые отказоустойчивые системы для защиты и восстановления контроля над квадрокоптером, если что-то пойдет не так.
Они позволяют указать области и условия, при которых можно безопасно летать, и действие, которое будет выполняться при срабатывании отказоустойчивости (например, при посадке, удержании позиции или возврате в указанную точку).
Ниже перечислены основные отказоустойчивые области:
-
низкий уровень заряда батареи; -
потеря связи с удаленным управлением; -
потеря координат в пространстве (качество оценки глобальной позиции слишком низкое); -
неполадки на борту (например, потеря подключения к компьютеру- компаньону) и т.д.
Режимы полета определяют, как автопилот реагирует на вход дистанционного управления, и то как он управляет движением транспортного средства во время автономного полета.
Режимы предоставляют различные типы/уровни поддержки автопилота для пользователя (пилота), начиная от автоматизации общих задач, таких как взлет и посадка, до механизмов, которые облегчают возврат квадрокоптера, удержание квадрокоптера в фиксированном положении.
Так как все режимы автопилота PX4 нас не интересуют, рассмотрим режим автопилота, с которым непосредственно будем работать. Данный режим называется «OFFBOARD». Это автоматический режим, который требует данные о местоположении (GPS или как в нашем случае локальные координаты от PX4FLOW Smart Camera). Если этот режим активирован, то коптер должен подчиняться заданному положению, скорости или настройке положения над MAVLink.
Перед включением этого режима коптер должен быть снят с защиты и должен уже получать поток целевых значений до того, как этот режим может быть задействован. Частота целевых значений должна быть более 2 Гц, если это не так, то автопилот выйдет из этого режима.
Режим «OFFBOARD» в основном используется для управления движением и ориентацией транспортного средства. Для этого режима требуется активное соединение с удаленной системой MAVLink (например, сопутствующим компьютером или GCS). Если соединение потеряно, после таймаута коптер попытается приземлиться или выполнить какое-либо действие. Действие определяется параметрами COM_OBL_ACT и COM_OBL_RC_ACT.
- 1 ... 11 12 13 14 15 16 17 18 ... 35