Добавлен: 08.11.2023
Просмотров: 1430
Скачиваний: 6
СОДЕРЖАНИЕ
Проблема охраны территорий от малогабаритных БПЛА
Обзор известных методов решения проблемы
Постановка задачи проектирования системы управления охранного квадрокоптера
Характеристики центрального процессора (CPU)
Барометрический датчик давления
Электронный регулятор скорости (ESC)
Принцип работы датчика с оптическим потоком
Результат сборки квадрокоптера
Программная среда Robot Operating System
Алгоритм управления автономным полетом охранного квадрокоптера
Финансовый менеджмент, ресурсоэффективность и ресурсосбережение
Продолжительность этапов работ
Расчет сметы затрат на выполнение проекта
Расчет затрат на электроэнергию
Расчет затрат на социальный налог
Расчет прочих (накладных) расходов
Безопасность в чрезвычайных ситуациях
Особенности законодательного регулирования проектных решений
Список используемых источников
MAVROS
MAVROS - MAVLink расширяемый узел связи ROS с прокси наземной станции управления.
Этот пакет обеспечивает коммуникационный драйвер для различных автопилотов с протоколом связи MAVLink. Дополнительно он обеспечивает мост UDP MAVLink для наземных станций управления (например, QGroundControl).
Основной узел может быть расширен плагинами, например, такими как mavros_extras.
Особенности пакета MAVROS:
-
связь с автопилотом через последовательный порт, UDP или TCP; -
внутренний прокси-сервер для наземной станции управления; -
система плагинов для перевода ROS-MAVLink; -
поддержка PX4Flow (через mavros_extras); -
поддержка режима OFFBOARD; -
преобразование географических координат.
Главный коммутационный узел mavros_node. Его запуск необходимо осуществлять файлом запуска. Так как в нашем квадрокоптере установлена прошивка PX4, то и запуск MAVROS необходимо производить файлом px4.launch.
-
Протокол MAVLink
MAVLink является основным каналом передачи команд из миникомпьютера в полетный контроллер. Micro Aerial Vehicle Link (MAVLink) [18] – протокол, который использует PX4 для связи наземной станции (GCS). Протокол состоит из сообщений, и их типов, а также набора
предписанных и служебных функций. Физическая передача происходит через последовательную линию, либо через USB, либо с помощью модуля 3DR Radio по беспроводной сети. Протокол определяет набор сообщений, включая отчеты о состоянии
квадрокоптера, входов, настройки параметров и сообщения передачи телеметрии. Для этих драйверов имеются отчеты для получения статуса, данных датчиков, ввода команд и управления двигателем. Сообщение обычно зашифровывается и отправляется со станции, работающей на сопутствующем компьютере, на квадрокоптер. Квадрокоптер декодирует, активирует обработчик событий сообщения и предпринимает соответствующие действия. Общение также работает наоборот. PX4 автоматически генерирует сообщения и отправляет их на станцию, например
данные телеметрии.
Тип сообщения отличается идентификатором сообщения (Message ID), который определяется протоколом. Он также содержит часть данных, которая изменяется в соответствии с идентификатором сообщения.
- 1 ... 13 14 15 16 17 18 19 20 ... 35
Структура пакета MAVLink
Сообщение содержит заголовок (6 байтов), тело и контрольную сумму (2 байта). Минимальная длина сообщения - 8 байт (сообщение не имеет тела) и максимум 263 байта. На рисунке 3.4 показана структура пакета MAVLink.
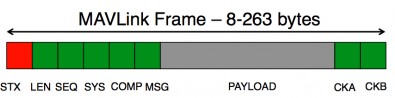
Рисунок 3.4 – Структура пакета MAVLink
Сообщения генерируются функциями оператора, и нам не нужно их полностью создавать из базы. Для выбора типа сообщения важны только две вещи: Message ID (MSG) и связанный с ним объект сообщения (PAYLOAD). Тело прочно связано с ID сообщения. Каждый идентификатор предварительно определен, он имеет идентификатор MAVLINK_MSG_ID,
который связан с именем сообщения. Например, MAVLINK_MSG_ID_HEARTBEAT имеет идентификатор, равный 0. Если он указан как идентификатор компонента, это сообщение HEARTBEAT.
Флаг пакета (STX) – указывает начало сообщения, всегда имеет значение 0xFE. Длина полезной нагрузки (LEN) – указывает длину тела пакета. Последовательность пакетов (SEQ) – последовательность увеличивается с каждым новым сообщением. Включает обнаружение потери пакетов. Системный идентификатор (SYS) – идентификационный номер ресурса или устройства, отправляющего это сообщение. Используется для различения соседних устройств. Идентификатор компонента (COMP) – подсистема или идентификатор компонента, который отправляет это сообщение. Позволяет различать различные компоненты одной системы. На данный момент этот элемент не имеет большого значения и установлен в ID системы. Идентификатор сообщения (MSG) – знает, как
будет выглядеть тело пакета (данные). Данные (PAYLOAD) – тело сообщения, также называемое полезной нагрузкой. Содержимое и размер зависят от идентификатора сообщения. Последней частью является контрольная сумма нужная для обнаружения ошибок.
-
Сообщения MAVLink
Рассмотрим некоторые сообщения, которые могут использоваться в проекте для управления квадрокоптером.
HEARTBEAT (# 0). Основная функция этого сообщения – информировать противоположную сторону о том, что система получает сообщения и отвечает. В частности, квадрокоптер отправляет это сообщение каждую секунду. Если в течение этого интервала произошел сбой пакета, произошло событие или проблема.
Например, перезапуск системы, разряд батареи, замерзание системы, авария, ошибка связи или потеря сигнала.
RAW_IMU (# 27). Здесь мы получаем необработанные данные из датчиков IMU (Инерционный измерительный блок). Для каждой оси x, y и z имеются данные ускорения, угловая скорость от гироскопа и данные магнитного поля от магнитометра.
ATTITUDE (# 30). В отчете дается информация о расположении квадрокоптера. Это выражается с помощью углов, которые делают оси x, y, z (конвенция North East Down) осями самолета. Оси самолета называются продольными, передними (продольными) и вертикальными (нормальными) осями и соответствуют элементам roll, pitch и yaw. Дополнительные данные представляют собой угловые скорости для отдельных осей.
LOCAL_POSITION_NED (# 32). Сообщение определяет рассчитанную локальную позицию из начала работы системы. Оси x, y, z соответствуют
конвенции North East Down, также известной как местная касательная плоскость (LTP). Элементы vx, vy, vz соответствуют рассчитанным скоростям оси.
GLOBAL_POSITION_INT (№ 33). Глобальная позиция, рассчитанная на основе GPS и акселерометров. Он предлагает расчетную географическую ширину, длину, высоту, относительную высоту, скорость движения по земле и направление компаса.
VFR HUD (# 74). Полетная информация, обычно отображаемая на контрольном дисплее (HUD, экран). Это дает, например, данные о скорости, направлении, высоте и подъеме летательного аппарата.
- 1 ... 14 15 16 17 18 19 20 21 ... 35