ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 139
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
2.2 Решение системы дифференциальных уравнений
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
4.2 Описание и построение структурной схемы электропривода
4.3 Разработка и описание принципиальной электросхемы датчика контроля состояния вентилей
4.4 Разработка и описание принципиальной электросхемы системы импульсно-фазового управления
4.5 Расчет и выбор элементов датчика контроля состояния вентилей
4.6 Расчет и выбор элементов системы импульсно-фазового управления
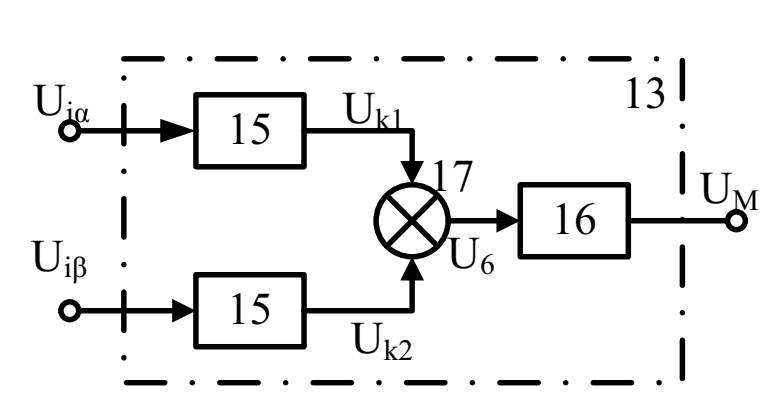
Рисунок 3.3а − Вычислитель момента
С выхода регулятора-усилителя поступает сигнал Uрна вход модулятора, который является входом вентильного электродвигателя. На выходе модулятора выделяется сигнал ⋅ sinωгр tU с несущей
частотой ωг , вырабатываемой встроенным генератором синусоидального
напряжения и изменяемой амплитуды Uр (коэффициент передачи
модулятора 8 принят равным единице). Этот сигнал поступает на
обмотку возбуждения синусно-косинусного датчика положения ротора. Сигналы с выхода ДПР поступают на вход фазочувствительных
выпрямителей, на выходах которых выделяются сигналы.
Управление моментом в замкнутом контуре эквивалентно классической системе управления. Отрицательная обратная связь не имеет ограничений, которые могли бы нарушить стабильность или эксплуатационную устойчивость. Любой входной опорный сигнал или работа нагрузки может привести к отрицательной обратной связи, а положительная обратная связь и релаксационные колебания не возникают.
Контроллеры ограничения крутящего момента могут быть оснащены известными законами управления и могут достигать высокой точности управления. Необходимый коэффициент усиления контура может быть отрегулирован. Это обеспечивает требуемую жесткость механических свойств привода клапана.
3. Вентильный электропривод с обратной связью по скорости
и логическими вычислителями
Структурная схема рассматриваемого вентильного электропривода приведена на рис. 3.4, где 1 – синхронная машина; 2 – ДПР; 3 – задатчик; 4 – блок сравнения; 5 – предварительный усилитель; 6 – регулятор; 7 – двухканальный усилитель; 8 – блок выделения модуля сигнала частоты вращения двигателя; 9 – блок изменения знака; 10 – блок определения направления вращения; 11, 12 – дифференциаторы; 13, 14 – выходы ДПР.
Блок определения направления вращения включает в себя два элемента НЕРАВНОЗНАЧНОСТЬ 15 и 16, компараторы 17-20, логические элементы И-НЕ 21 и 2НЕ-И-НЕ 22 и RS-триггер 23. Входы элементов НЕРАВНОЗНАЧНОСТЬ 15 и 16 подключены к входам компараторов 17-20, выходы которых образуют соответствующие выходы блока 10, подключенные к выходам дифференциаторов 13 и 14 и выходам ДПР. Выходы элементов 15 и 16 подключены соответственно к входам элементов 21 и 22, выходы которых подключены к входам RS-триггера, выход которого образует выход блока 10, подключенный к управляющему входу блока изменения знака.
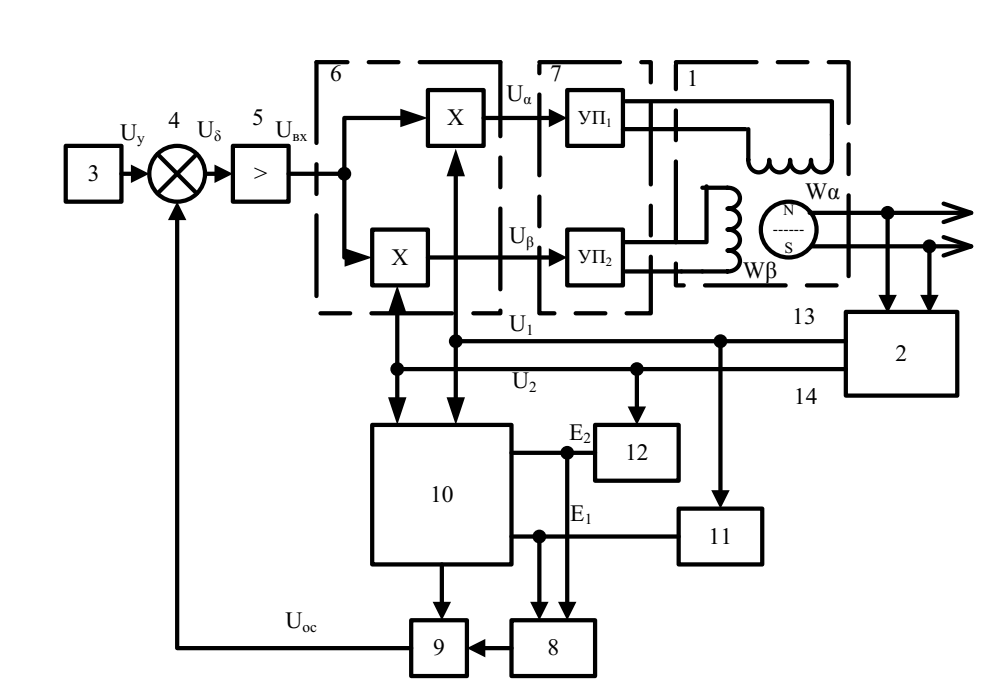
Рисунок 3.4 − Функциональная схема вентильного электропривода
с обратной связью по скорости
Блок выделения модуля 8 включает в себя последовательно
соединенные сумматор 24 и блок извлечения квадратного корня 25, выход
которого является выходом блока выделения модуля 8. Входы сумматора
через квадраторы 26 подключены к входам блока выделения модуля 8.
Регулятор 6 выполнен в виде двух умножителей, первые входы которых объединены и подключены к выходу предварительного усилителя 5, а вторые их входы подключены к соответствующим выходам ДПР.
При вращении ротора синхронной машины ДПР вырабатывает
сигналы U1 и U2.
Дифференциаторы выполняют дифференцирование сигналов с выходов ДПР. Полученные сигналы несут информацию о частоте вращения вала двигателя, но промодулированы знакопеременными тригонометрическими функциями углового перемещения sinα(t) и cosα(t).
Выделение сигнала, пропорционального частоте вращения,
происходит в блоке 8.
Таким образом, частотная обратная связь в предлагаемом двигателе
не ограничена по скорости, числу оборотов или режиму работы.
Ограничений по скорости и режиму работы электродвигателя нет. Обратная связь имеет следующие характеристики
Обратная связь имеет линейные характеристики и обладает высокой надежностью. Положительным эффектом данной схемы является повышение точности и скорость работы электропривода за счет рациональности.
Хороший эффект схемы заключается в увеличении точности и быстродействия при работе в электроприводах за счет рациональной организации функциональных связей элементов бесконтактного двигателя постоянного тока и схемной реализации блоков, формирующих сигнал обратной связи.
Проведя анализ выбираем реверсивный электропривод ВИД, как самое наилучшее решение для выпускной квалификационной работы.
4. РАЗРАБОТКА СИСТЕМЫ ДЛЯ ПИТАНИЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
4.1 Обоснование, выбор и описание функциональной схемы электропривода
При составлении функциональной схемы электропривода в соответствии с техническими требованиями ВИД отметим характерные особенности проектируемого электропривода:
- тип преобразователя – тиристорный;
- пуск – управляемый;
- торможение – динамическое управляемое;
- наличие реверса;
- типы защиты электропривода - нулевая, тепловая, токовая, максимальная токовая, от перенапряжений;
- вид блокировок – неправильный порядок чередования фаз;
- тип блока – система импульсного управления автономным инвертором (аналоговая);
- тип датчика – потока электродвигателя.
С учетом типа преобразователя будем использовать трехфазную мостовую схему управляемого выпрямителя (УВ) для питания автономного инвертора (АИ) напряжения.
Источником питания служит трехфазная сеть переменного тока с напряжением 380 В.
Автономный инвертор питается от источника постоянного тока следовательно необходимо обеспечить преобразование энергии переменного тока в энергию постоянного тока. Для преобразования электрической энергии переменного тока в электрическую энергию постоянного тока, мы применяем управляемый выпрямитель, собранный по мостовой схеме, элементной базой которого являются тиристоры.
Для управления выпрямителем используется система импульсно-фазового управления (СИФУ). Сигналы на СИФУ поступают с блока логики-управления ( БЛУ) и регулятора скорости (РС). Также на СИФУ поступает сигнал с блока динамического управляемого торможения (БУДТ), обеспечивающий уменьшение подводимого напряжения к автономному инвертору (АИ) при динамическом торможении.
Функциональная схема управляемого выпрямителя представлена на рисунке 4.1.
Рисунок 4.1 – Функциональная схема управляемого выпрямителя
Для питания обмоток статора электродвигателя используется автономный инвертор напряжения с параллельной двухступенчатой индивидуальной коммутацией. Этот инвертор по своим характеристикам наиболее близок к полностью управляемому вентильному инвертору.
Для реализации генераторного режима автономные инверторы оснащаются диодами VD7...VD12. ...VD12.
Управление автономными инверторами осуществляется системой управляющих сигналов, подаваемых на тиристоры в цепи.
Система управления автономного инвертора состоит из трех функциональных устройств: генератора импульсов (ГИИ), распределителя импульсов (РИ) и драйвера (ДР).
Эта система управления позволяет выполнять следующие действия
- Переключать проводящие тиристоры сразу после завершения операции переключения;
- отключение токопроводящих тиристоров при получении сигнала защиты инвертора; и
- Переход в режим динамического торможения и возврат при получении управляющего сигнала.
Генератор импульсов (PI) автономного инвертора получает сигналы от датчика положения ротора (RPS) и системы контроля состояния силового клапана. Генератор импульсов (PI) посылает сигналы на блок распределения импульсов (PDU). Блок распределения импульсов (DP) также получает сигналы от блока реверса (RB) и блока управления динамическим торможением (DCCB).
Тиристоры в автономном распределенном инверторе получают импульсы от системы управления через выходной формирователь импульсов (драйвер). Помимо формирования импульсов, драйвер также обеспечивает гальваническую развязку.
Функциональная схема автономного инвертора представлена на рисунке 4.2.
Использован автоматический выключатель QF1 и комбинированный автоматический выключатель для ручного включения и отключения силовой части от сети.
Использованы магнитные пускатели KM1 для дистанционного включения и отключения силовой части от сети. Дистанционное отключение реле необходимо для контроля работы инвертора во время технического процесса установки. Магнитный пускатель KM1 также обеспечивает нулевую защиту.
Рисунок 4.2 –Схема автономного инвертора
Со стороны переменного тока быстродействующие предохранители FU2.... ...FU4 на стороне переменного тока и быстродействующие предохранители FU5 и FU6 на стороне постоянного тока.
Для защиты тиристоров от перенапряжения управляющего выпрямителя используется RC-цепочка, подключенная параллельно тиристорам.
Емкостной фильтр C7 используется для уменьшения фликкеров напряжения выпрямителя.
Для дистанционного управления инвертором в дополнение к магнитному пускателю используется кнопка "пуск" и "стоп", а для защиты цепи управления - предохранитель FU1.
Для обеспечения защиты от неправильного чередования используем блок контроля чередования фаз (БКЧФ).
Кроме вышеперечисленных элементов функциональная схема электропривода содержит следующие блоки:
- блок питания (БП), подающего управляющее напряжение на элементы системы управления электроприводом;
- блок логики-управления (БЛУ), вырабатывающий управляющие импульсы;
- блок задания (БЗ), выполняющий функции задания скорости;
- задатчик интенсивности (ЗИ);
- датчик скорости (ДС). Назначением датчика скорости является преобразование скорости вращения двигателя в пропорциональное ему напряжение;
- датчик тока (ДТ), предназначенный для контроля величины тока в цепи преобразователя;
- регулятор скорости (РС), регулятор тока (РТ), служат для преобразования управляющего сигнала;
- датчик контроля состояния вентилей (ДСВ) в автономном инверторе;
- блок контроля состояния вентилей (БКСВ);
- датчик положения ротора (ДПР).