Файл: Отчет По расчётнографической работе По дисциплине Основы теории управления.docx
Добавлен: 10.01.2024
Просмотров: 20
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Новосибирский государственный технический университет»
Кафедра вычислительной техники
Отчет
По расчётно-графической работе
По дисциплине: «Основы теории управления»
Выполнил: Преподаватель: Воевода А.А.
Группа:
Новосибирск, 2022
Цель работы
Исследовать систему, состоящую из трёх пружин и трёх грузов. Провести теоретические расчёты и реализовать систему в пакете Matlab Simulink. Добиться устойчивости системы путём расчёта и добавления к ней регулятора. Перевести получившуюся систему в дискретный вид.
Задание
Дана трёхмассовая система без демпфирования (d1=d2=d3=0):
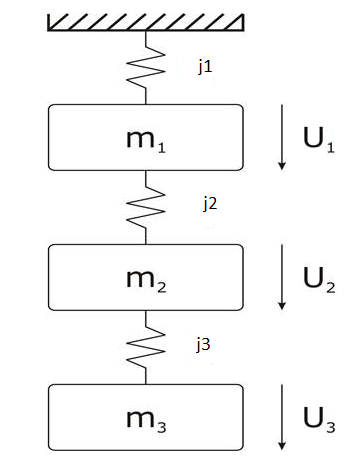
Рис.1. Схема задания
Сила прикладывается только ко второй массе u1=u3=0. Стоит задача управлять положением первой массы x1. В качестве входных параметров были взяты: m1 = 3, m2 = 2, m3 = 1, j1 = 4, j2 = 5, j3 = 6. В качестве входного сигнала – u2.
Ход работы
Силы, действующие на данную систему систему:



Составим систему на основе второго закона Ньютона:
Тогда
Преобразование Лапаласа:
Выразим:
Найдём решение системы в Matchad:
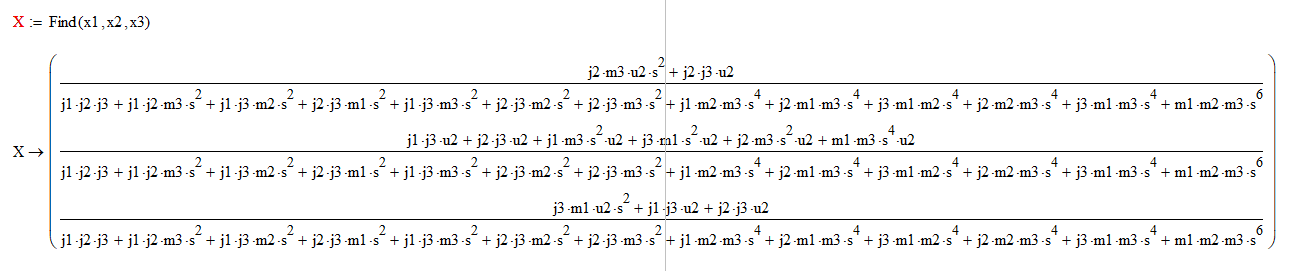
Нас интересует


Теперь необходимо подставить исходные значения в полученный полином.
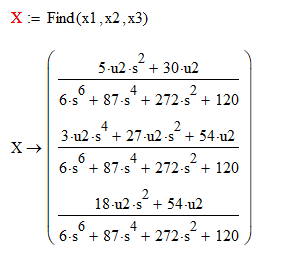
Тогда передаточная функция системы будет иметь вид:

Схема в Simulik:

Рис.2. Построенная схема в Simulink
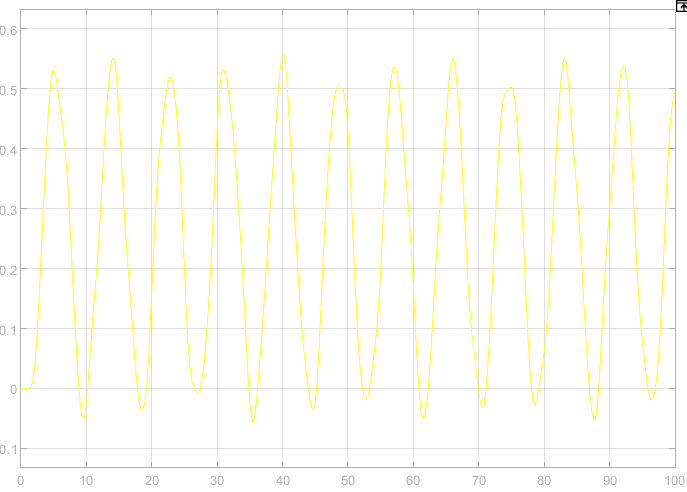
Рис.3.График переходной функции системы
С помощью Simulink построим диаграмму Боде и годограф Найквиста:
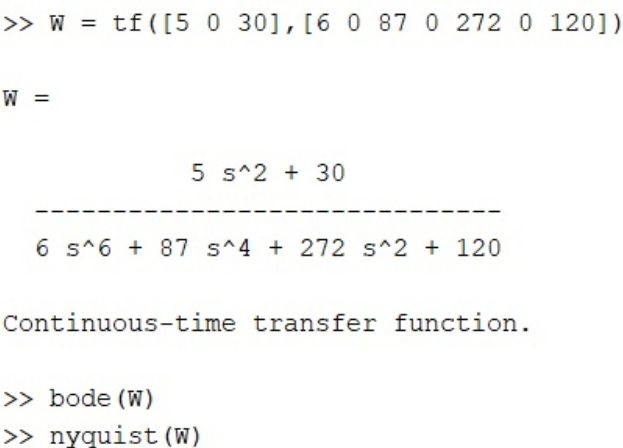
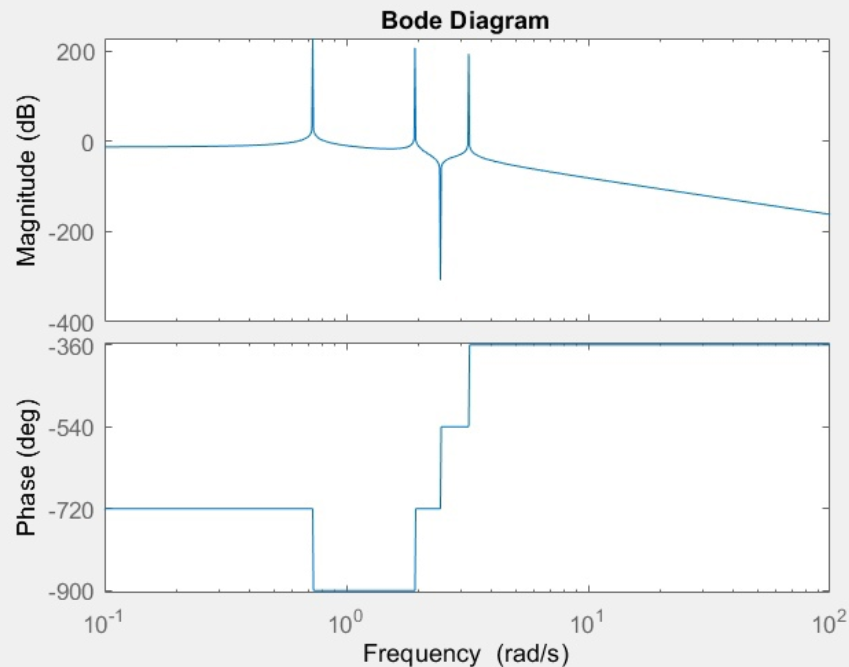
Рис.4. ЛАЧХ и ЛФЧХ
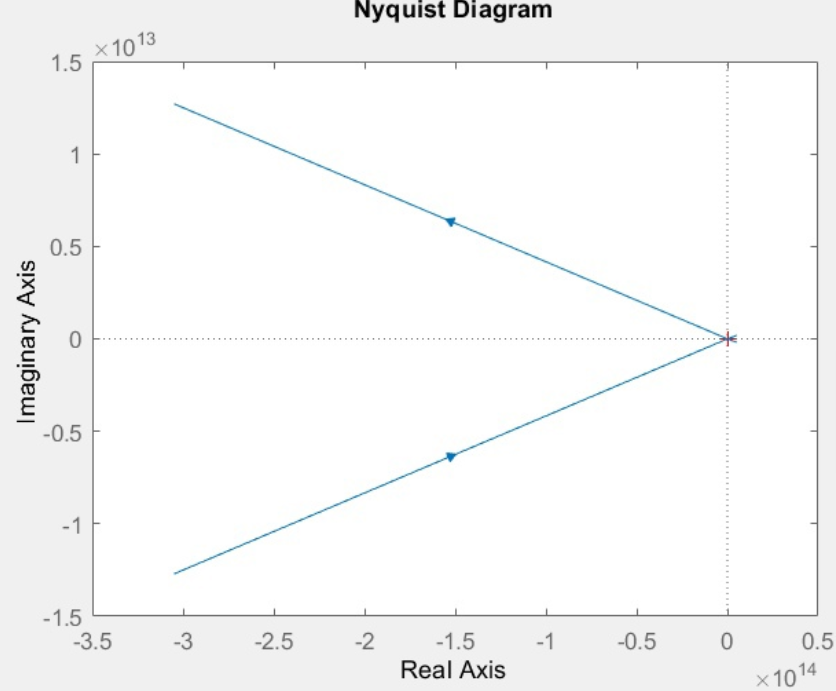
Рис.5. Годограф Найквиста
Найдём корни ХПЗС в Matlab:
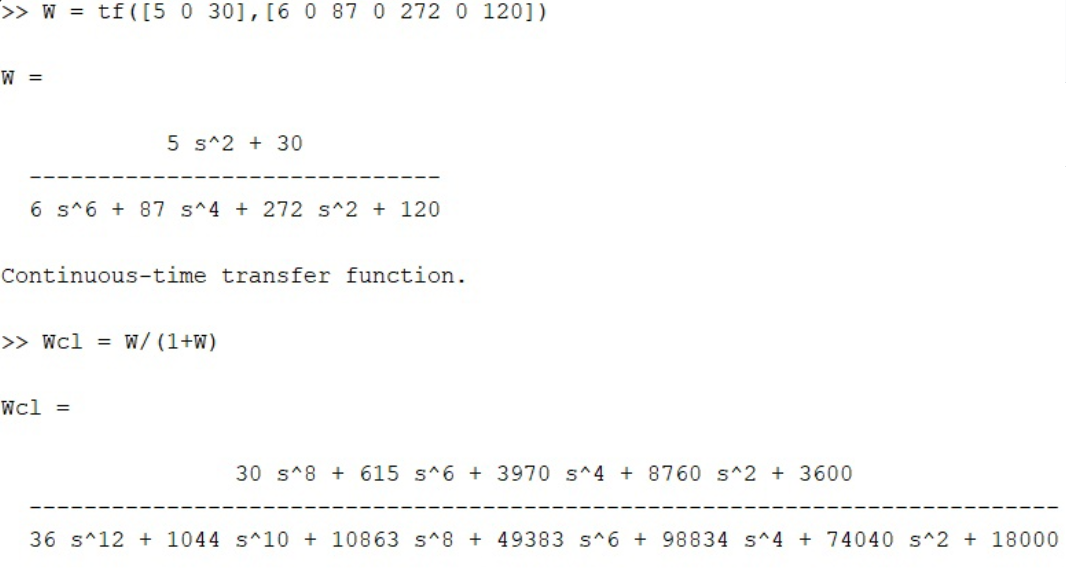
Рис.7. Поиск корней
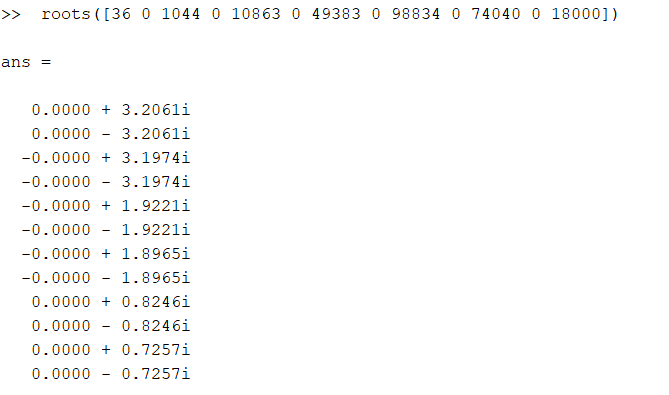
Рис.6. Корни ХПЗС
Как видно из рис.8 система находится на границе устойчивости
По методу размещения полюсов передаточной функции замкнутой системы выберем регулятор. Проведем необходимые вычисления в система MatchCAD. Приходим к тому, что ХПЗС сводится к биному Ньютона 11 степени. Тогда останется приравнять коэффициенты при одинаковых степенях s – решить матричное уравнение.
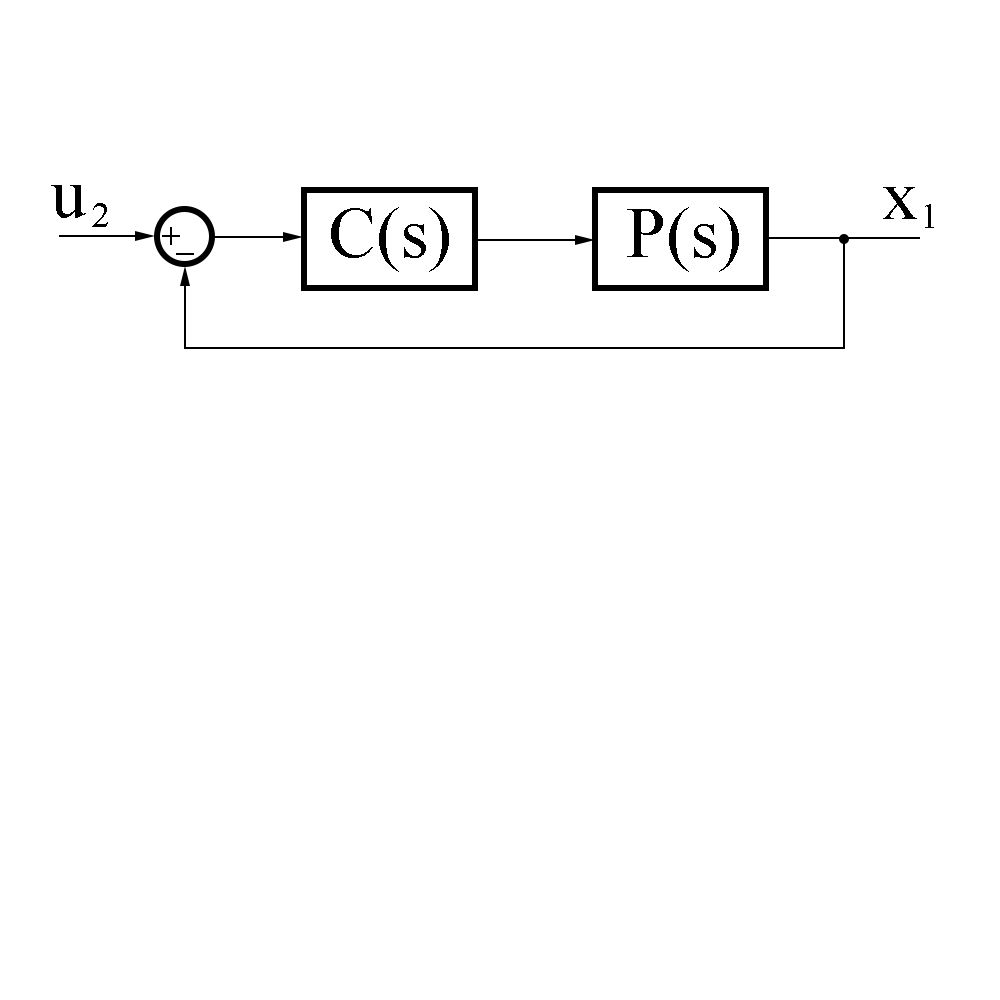
Рисунок 7. Структурная схема системы с регулятором в общем виде
Где
 – регулятор,
– регулятор,  – объект управления.
– объект управления.Выберем регулятор вида:


Необходимо определить коэффициенты

,
 .
.ХПЗС:
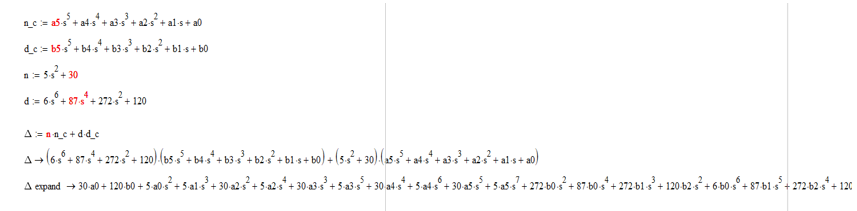
Предположим, что мы хотим выбрать регулятор так, чтобы разместить корни полинома
 в заданных точках, то есть добиться выполнения равенства
в заданных точках, то есть добиться выполнения равенства  .
.По биному Ньютона:

Поиск неизвестных коэффициентов сводим к решению матричного уравнения вида:
 ,
, ,
,где X – искомые коэффициенты, A – коэффициенты при X, B – коэффициенты бинома Ньютона.
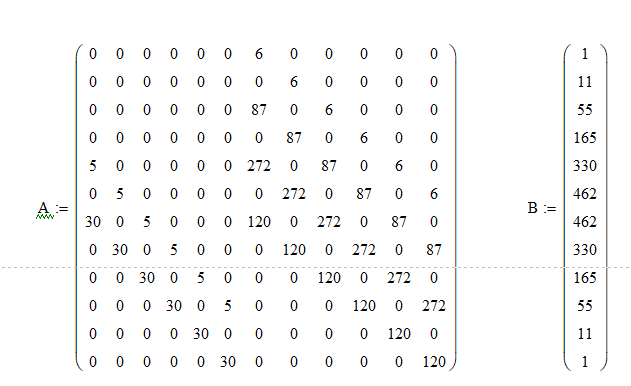
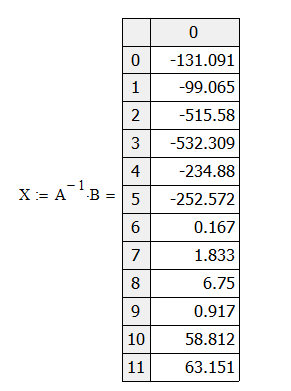
Рис.7. Найденные коэффициенты регулятора
Подставим полученные коэффициенты в регулятора и соберем структурную схему в Simulink:

Рис.8. Структурная схема с регулятором
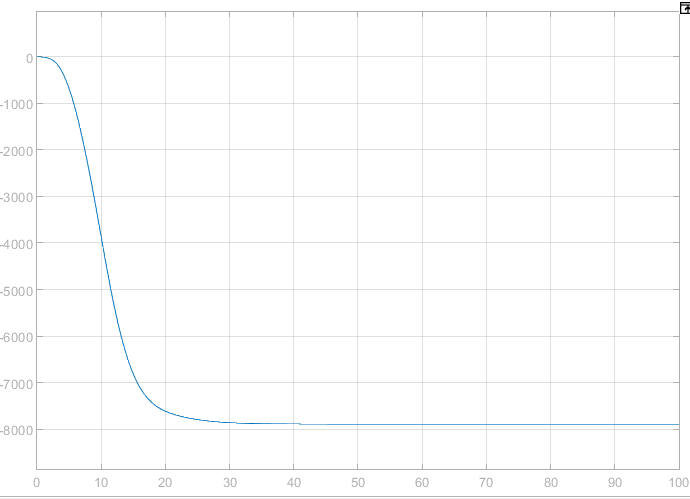
Рис.9. График переходной функции
Построим в Matlab диаграммы bode и годограф Найкфиста:
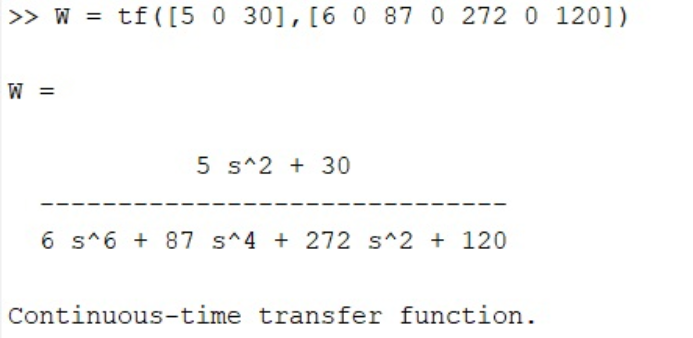
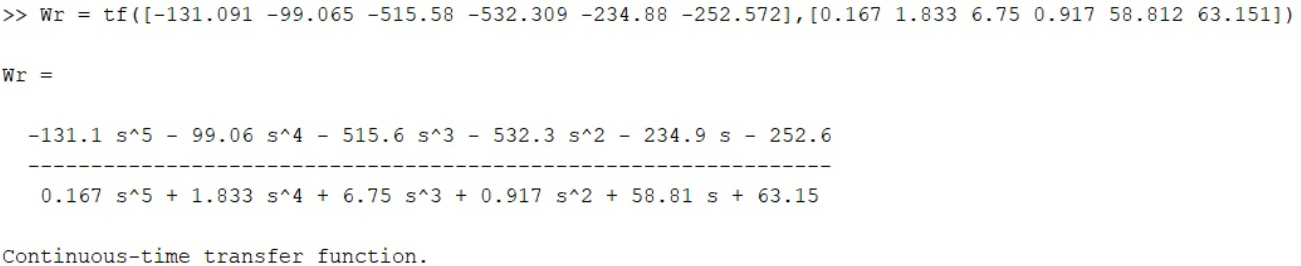
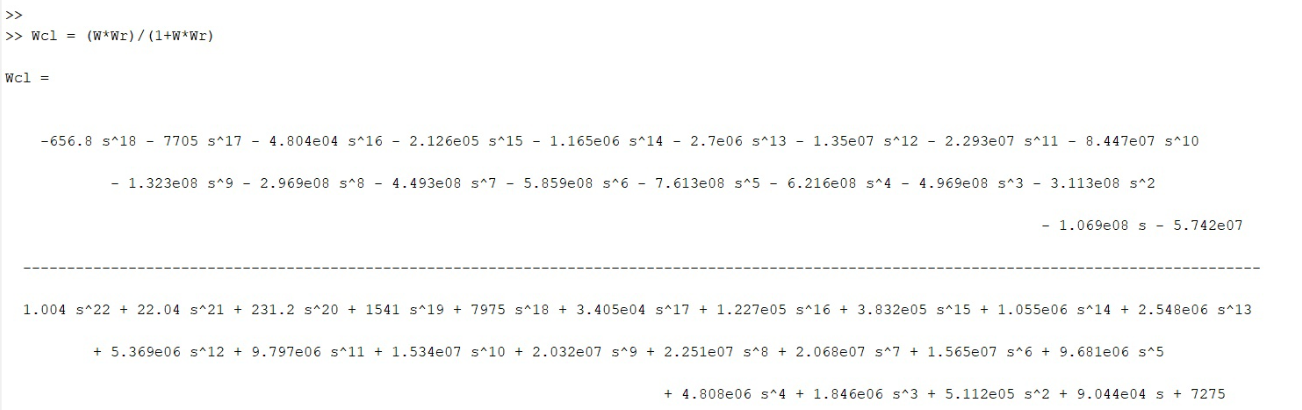
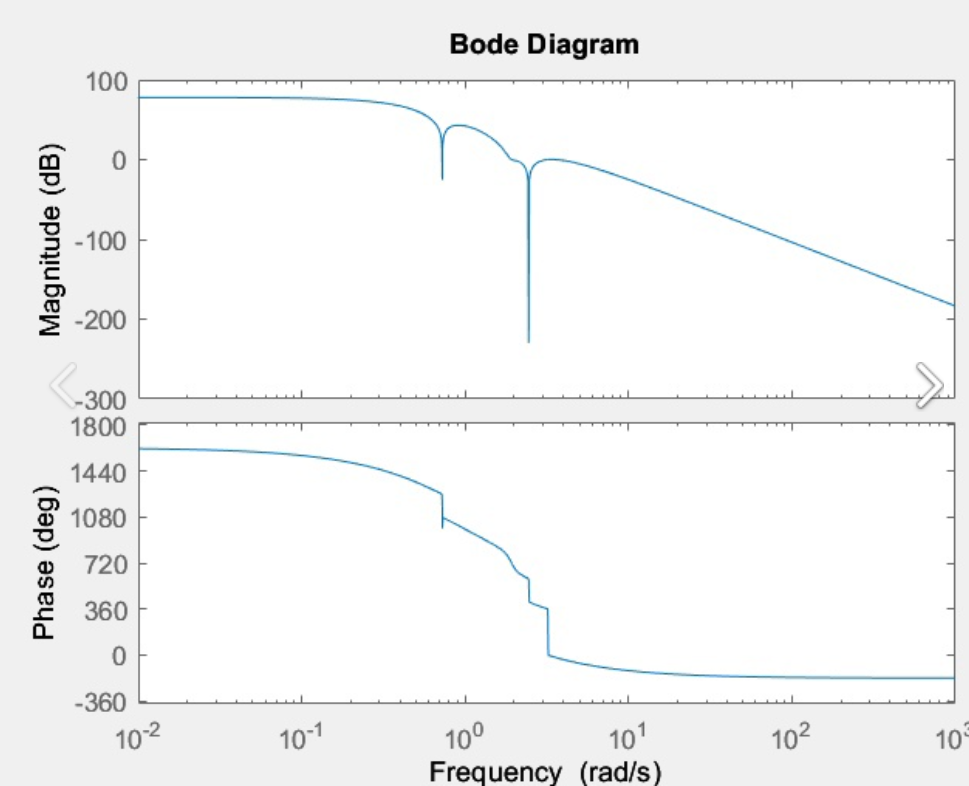
Рис.10 ЛАЧХ и ЛФЧХ
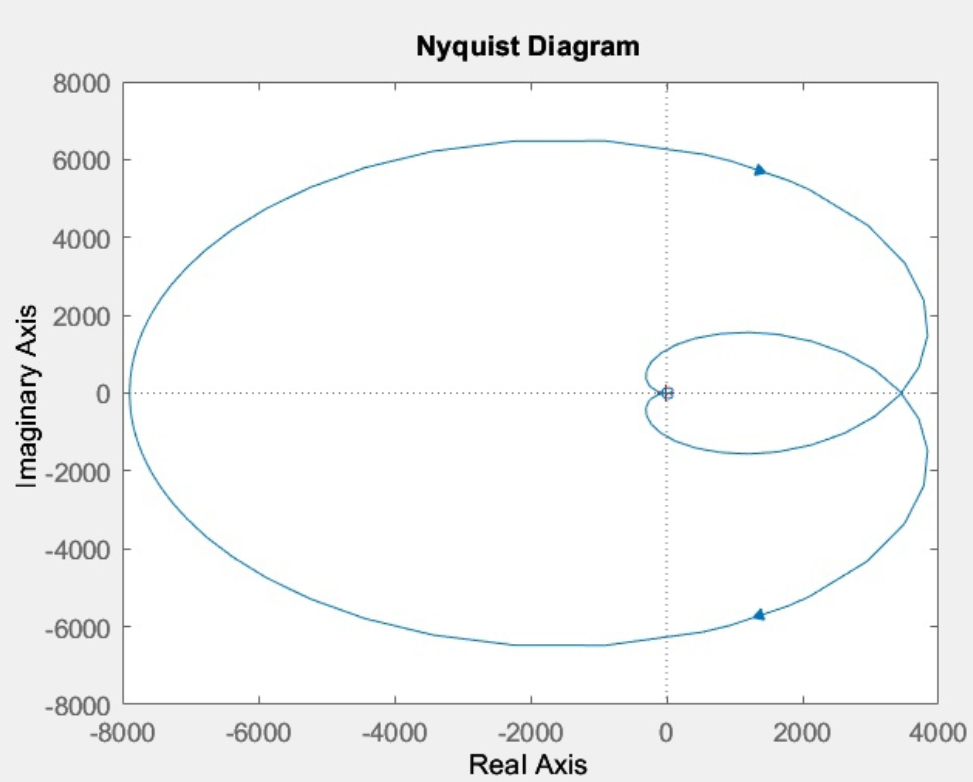
Рис.11 Годограф Найквиста
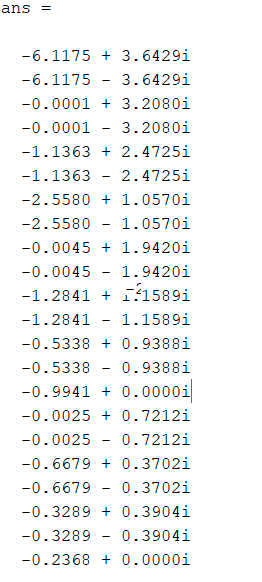
Рис.12. Корни ХПЗС
Так как все корни ХПЗС расположены в левой полуплоскоти, то система устойчива.
Переведем теперь систему в дискретный вид, используя функцию c2d(), transfer function регулятора и шаг дискретизации 0.1.
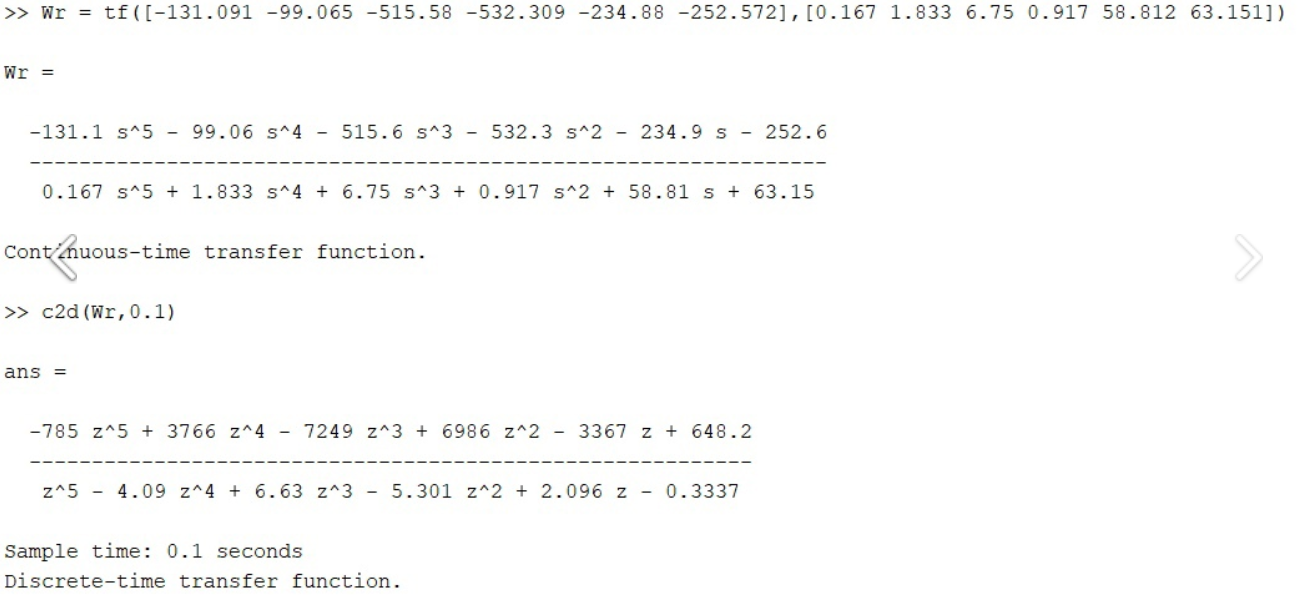
Теперь соберём схему в Simulink, заменив блок Trunsfer func у регулятора на блок Discrete Trunsfer func:

Рис.13. Структурная схема с дискретным регулятором
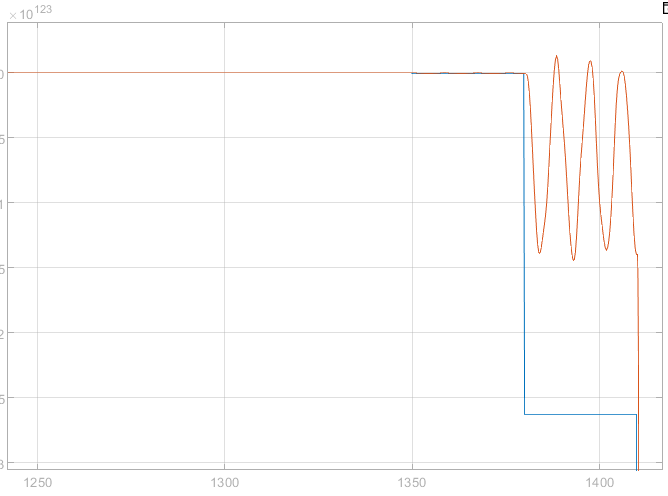
Рис.14. График
Вывод
В ходе выполнения работы была исследована система из трех пружин и трех грузов. Найдена transfer function зависимости входного и выходного сигналов. Найден регулятор для достижения устойчивости системы, он же переведен в дискретный вид.