Файл: Контрольная работа по дисциплине Автоматизированный электропривод.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 56
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 Министерство науки и высшего образования Российской Федерации
Министерство науки и высшего образования Российской ФедерацииКумертауский филиал
федерального государственного
бюджетного образовательного учреждения
высшего образования
«Оренбургский государственный университет»
(Кумертауский филиал ОГУ)
Кафедра электроснабжения промышленных предприятий
КОНТРОЛЬНАЯ РАБОТА
по дисциплине «Автоматизированный электропривод»
на тему «Расчет пускового реостата для заданного типа двигателя»
КФ ОГУ 13.03.02. 4 0 23. 992 О
Руководитель работы
___________Сорокин В.А.
«____»___________2023 г.
Выполнил
Студент группы 20ЭЭ(ба)Э
____________Егоров Д.С.
«____»____________2023 г.
Кумертау 2023
Содержание
Задание 3
1 Расчет двигателя постоянного тока 4
2 Расчет двигателя переменного тока 7
Задание
1) Рассчитать пусковой реостат для заданного типа двигателя при нагрузке на его валу М = 0.8 ∙ МНОМ и полном потоке возбуждения.
2) Изобразить схему включения двигателя совместно с пусковым реостатом и указанием ступеней сопротивления.
3) Определить модуль статической жесткости β естественной механической характеристики двигателя.
Дано:
Таблица 1 - Двигатель постоянного тока
| Тип | РНОМ, кВт | n, об/мин | Iян, А | rя+ rД.П | rпар, Ом | IВН, А | J кг∙м2 |
| П11 | 6,0 | 3000 | 33,0 | 0,36 | 280 | 0,6 | 0,15 |
Таблица 2 - Двигатель переменного тока
| Тип | РНОМ, кВт | n, об/мин | Мм/Мн | Ерн, В | IРН, А | rр, Ом |
| МТ-51-8 | 22,0 | 723 | 3,0 | 197 | 70,5 | 0,0496 |
1 Расчет двигателя постоянного тока
Двигатель параллельного возбуждения 6,0 кВт, 220 В, 3000 об/мин, IЯ.Н = 33,0 А пускается раз в смену при трехсменной работе.
Момент инерции, приведенный к валу двигателя, равен JM = 0,15 кг∙м2.
Двигатель управляется по схеме рисунок 1.
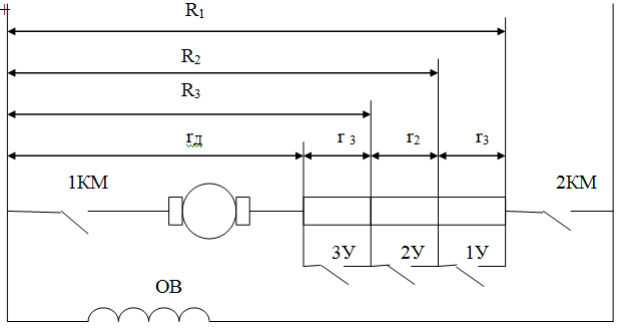
Рисунок 1
Решение: Строим естественную характеристику двигателя, для чего предварительно определяем внутренне сопротивление его по рисунку 2.
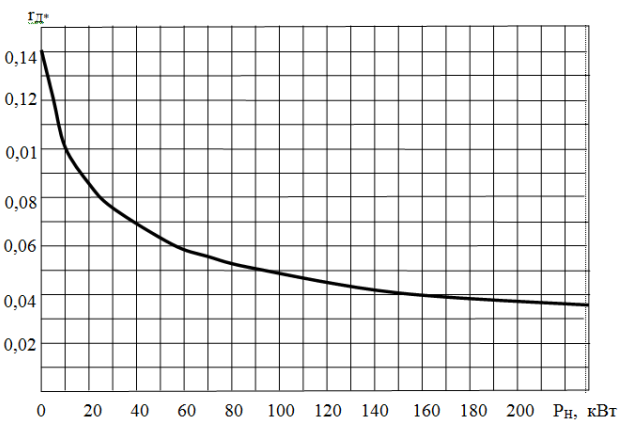
Рисунок 2
Откладываем на вертикали номинального момента относительное падение частоты вращения 0,11 и через эту точку и точку идеального холостого хода проводим прямую.
Принимаем, что номинальный момент МН = 1 Н∙м.
Вследствие того, что двигатель пускается 3 раза в сутки, нет необходимости заставлять его быстро ускоряться, учитывая, что удары от пусковых моментов нежелательны. Для минимальных пиков момента необходимо задавать переключающими моментами, которые примем на 10 % выше статического, т.е. будем считать МДОП = 0,8∙МН = 0,8

Рисунок 3
После нескольких пробных построений находим, что заданных трех ступеней сопротивления пускового резистора пики момента М1* = 1,4 Н∙м.
Отсчитывая относительные падения частоты вращения между характеристиками при МН =1 Н∙м, находим сопротивления ступеней резистора r1* = 0,23 , r2* = 0,14 , r3* = 0,08.
Найдем номинальное сопротивление двигателя:
Сопротивления ступеней пускового резистора:
Определим модуль статической жесткости естественной механической характеристики двигателя:



2 Расчет двигателя переменного тока
Двигатель управляется по схеме, показанной на рисунке 4.
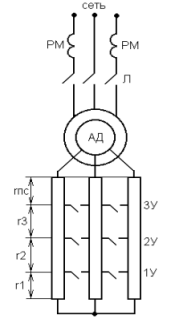
Рисунок 4
Решение. Двигатель всегда пускается в холостую при расцепленной муфте, преодолевая только трения в редукторе. Ориентировочно можно полагать, что статический момент холостого хода составляет 0,10,2 номинального момента. Учитывая, что при пуске двигатель должен развернуться маховик, и не желая получить слишком большое время ускорения, которое может оказаться больше максимальной выдержки времени применяемых маятниковых реле, зададимся не переключающими, а пиковыми 1,5-кратными моментами. Считая число ступеней m = 3 , пики момента М1 1,5 и скольжение при номинальном моменте ввиду наличия постоянно включенной секции 5 = 0,1 определяем отношение пиковых моментов к переключающим:
Моменты переключения получим:
т. е. значительно больше статического при пуске двигателя. Сопротивление постоянно включенной секции резистора определится:

Начальное сопротивление в цепи ротора:
Сопротивления ступеней найдутся по формуле, где вместо внутреннего активного сопротивления цепи ротора нужно подставлять полное активное сопротивление цепи ротора:



Определим жесткость системы: