ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 760
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Ч
| Червячная передача | механизм для передачи вращения между валами со скрещивающимися осями посредством винта (червяка) и сопряженного с ним червячного колеса. |
| Число степеней подвижности | число независимых возможных перемещений. |
| Червячная фреза | инструмент для нарезания зубчатых колес методом обкатки (огибания). |
| Частичное уравновешивание плоского механизма | при котором сумма всех сил инерции равна нулю, а сумма моментов сил инерции не равна нулю. Такое частичное уравновешивание называется статическим. |
| Число степеней свободы материальной точки или тела (звена) | число независимых координат (перемещений), которым обладает материальная точка или тело (звено). |
| Число степеней свободы механизма | число независимых вариаций обобщённых координат (возможных перемещений) механизма. Структурные степени свободы механизма определяются геометрическими связями. Параметрические степени свободы зависят от массы, жёсткости звеньев и параметров режима движения. |
Ш
| Шаг делительный (зубьев) | расстояние между одноименными профилями двух соседних зубьев, измеренное по делительной окружности. |
| Шаг зацепления | расстояние t между одинаково расположенными точками двух соседних зубьев, измеренное по делительной окружности. 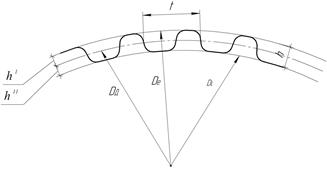 |
| Шарнирный механизм | механизм, звенья которого образуют только вращательные пары. Примерами шарнирных механизмов являются кривошипно-коромысловый механизм, двухкоромысловый механизм и др. 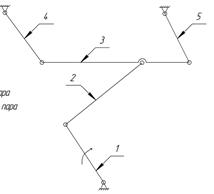 |
| Шарнирный четырехзвенный механизм | шарнирный механизм, содержащий три подвижных звена и стойку. |
| Шатун | звено рычажного механизма, образующее кинематические пары только с подвижными звеньями (совершает сложно-плоское движение относительно стойки) (звено 3). 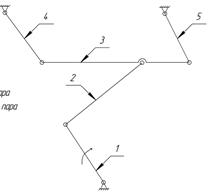 |
| Шатунная кривая | траектория, описываемая какой-либо точкой шатуна. |
Э
| Эвольвента | кривая, геометрическое место центров кривизны которой является другая кривая, называемая эволютой. |
| Элемент звена | поверхности, линии, точки, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару. |
| Элемент кинематической пары | совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару. |
2.Кинематический анализ и синтез механизмов
-
Основные понятия кинематики механизмов
5.В процессе проектирования механизма инженеру потребовалось определить скорости и ускорения выходного звена за полный цикл работы механизма. В общем случае задача будет называться…
Ответ:
-
кинематическим синтезом -
кинетостатическим расчётом -
кинематическим анализом -
структурным анализом
Решение:
Правильный ответ: кинематическим анализом.
Кинематический анализ механизма (Kinematic analysis of mechanism) – определение движения звеньев механизма по заданному движению
20. В процессе проектирования инженеру потребовалось определить размеры звеньев механизма по заданным кинематическим характеристикам входного и выходного звена и структурной схеме. В общем случае задача будет называться…
Варианты ответа:
структурным синтезом
кинетостатическим расчётом
кинематическим анализом
кинематическим синтезом
Решение:
Кинематический синтез механизма (Kinematic synthesis of mechanism) – проектирование кинематической схемы механизма.
Кинематическая схема механизма (Kinematic diagram of mechanism) – схема механизма, выполненная в масштабе.
43. К методам кинематического анализа относится(-ятся)…
Варианты ответа:
только графоаналитический метод
аналитический, графический и графоаналитический
метод Мерцалова и метод Виттенбауэра
кинемостатический метод
Решение:
1. Аналитический.
2. Графический (МЦС и МЦУ).
3. Графоаналитический (метод планов).
-
Синтез плоских стержневых механизмов по заданным кинематическим свойствам
6. Звено 5 будет занимать крайние положения, когда…
Ответ:
-
-
кривошип OA будет параллелен горизонтальной оси -
-

Решение:
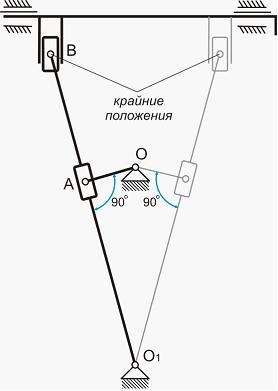
21. Угол размаха кулисы обозначен цифрой…
Варианты ответа:
1
4
2
3
Решение:
Правильный ответ: 4.
Угол размаха кулисы – это угол между двумя крайними положениями, которые может занимать кулиса.
37. Коэффициент изменения средней скорости вычисляют по формуле _________ (
Варианты ответа:
Решение:
Коэффициентом изменения средней скорости выходного звена механизма называют отношение средних скоростей в период холостого и рабочего ходов .
Решение:
Коэффициентом изменения средней скорости выходного звена механизма называют отношение средних скоростей в период холостого и рабочего ходов
-
Кинематический анализ зубчатых механизмов
7. Передаточное отношение
…
Варианты ответа:
у редуктора (понижающей передачи)
у редуктора (понижающей передачи)
у редуктора (понижающей передачи)
у редуктора (понижающей передачи)
Решение:
Зубчатые механизмы, в которых происходит уменьшение угловых скоростей при передаче движения от входного звена к выходному, называют понижающими передачами, или редукторами . Если скорости увеличиваются, то передачи называются повышающими, или мультипликаторами .
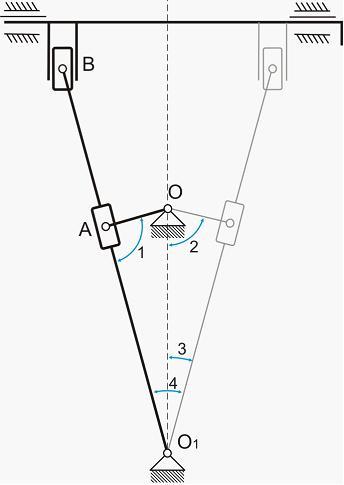
22. Для определения передаточного отношения в данном редукторе необходимо и достаточно…

Варианты ответа:
вычислить отношение чисел зубьев 4-го и 1-го колёс
вычислить произведение передаточных отношений всех ступеней редуктора
вычислить отношение чисел зубьев 1-го и 4-го колёс
вычислить отношение чисел зубьев 3-го и 2-го колёс
Решение:
В данном редукторе колёса 2 и 3 являются паразитными: они участвуют в движении, но не влияют на величину передаточного отношения. Поэтому необходимо и достаточно вычислить отношение чисел зубьев 4-го и 1-го колёс.
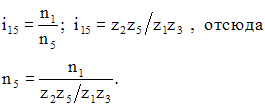
38. В данном редукторе число оборотов пятого зубчатого колеса вычисляется по формуле…
Варианты ответа:

Решение:
Колесо 4 – паразитное, его не учитываем при подсчёте передаточного отношения.
-
Кинематическое исследование механизмов (методом планов)
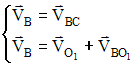
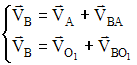
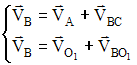
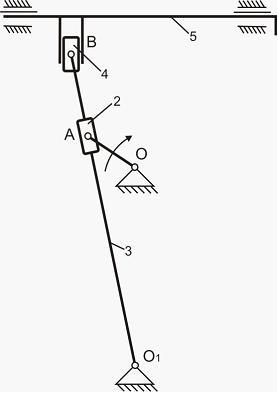
8. Для определения скорости точки B и построения плана скоростей необходимо воспользоваться следующей верной системой векторных уравнений:

Ответ: