ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 763
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Ответы:
Уравнение моментов всех сил для звена относительно внутренней кинематической пары
Уравнение моментов всех сил для группы относительно внутренней кинематической пары
Уравнение равновесия одного из звеньев
Уравнение равновесия для всей группы
Вопрос 17. Какая сила определяется по методу "жесткого рычага" Жуковского?
Ответы:
Движущая сила
Сила полезного сопротивления
Уравновешивающая сила
Сила инерции
Вопрос 18. Какие силы являются основными расчетными нагрузками, если сила полезного сопротивления мала, а ускорения звеньев значительны?
Ответы:
Силы тяжести
Силы трения
Силы упругости
Силы инерции
Вопрос 19. Какие силы не определяются методом "жесткого рычага" Жуковского?
Ответы:
Движущая сила
Уравновешивающая сила
Уравновешивающий момент
Реакции в кинематических парах
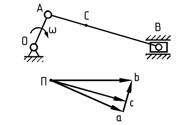
Вопрос 20. Как направлен главный вектор сил инерции шатуна АВ?
Ответы:
В сторону, противоположную ускорению точки А
В сторону, противоположную ускорению точки В
Перпендикулярно к звену АВ
В сторону, противоположную ускорению центра тяжести звена АВ
Вопрос 21. Как направлен главный момент сил инерции шатуна АВ?
Ответы:
В сторону, противоположную угловой скорости звена АВ
В сторону углового ускорения звена АВ
В сторону, противоположную угловому ускорению звена АВ
В сторону угловой скорости звена АВ
Вопрос 22. Каким моментом является уравновешивающий момент?
Ответы:
Движущим моментом для механизма машины двигателя
Движущим моментом для механизма рабочей машины
Моментом сопротивления для механизма машины двигателя
Моментом сопротивления для механизма рабочей машины
Вопрос 23. Что не требуется для определения уравновешивающего момента по методу "жесткого рычага" Жуковского?
Ответы:
Построения плана скоростей механизма
Нагружения "рычага" Жуковского силами, под действием которых механизм находится в состоянии равновесия
Определения реакций в кинематических парах механизма
Составления уравнения равновесия "жесткого рычага"
Вопрос 24. Какое утверждение является неправильным?
Ответы:
Движущая сила приложена к ведущему звену и ее направление совпадает с направлением движения ведущего звена
Движущая сила приложена к ведомому звену и ее направление совпадает с направлением движения ведомого звена
Сила полезного сопротивления приложена к ведущему звену и ее направление совпадает с направлением движения ведущего звена
Сила полезного сопротивления приложена к ведомому звену и направлена в сторону, противоположную направлению движения ведомого звена
Вопрос 25. При силовом расчете плоских рычажных механизмов с низшими парами всю кинематическую цепь делят на следующие составные части:
Ответы:
звено
деталь
структурные группы и механизмы 1-го класса
система из двух звеньев, скрепленных кинематическими парами
Вопрос 26. Коэффициент полезного действия при последовательном соединении машин определяется по формуле (hi – коэффициент полезного действия i-й машины, li – доля энергии, которая затрачивается на функционирование i-й машины):
Ответы:
Вопрос 27. Укажите силу технологического сопротивления:
Ответы:
сила тяжести груза, поднимаемого мостовым краном
сила инерции звена
сила трения между поршнем и цилиндром двигателя внутреннего сгорания
сила, обусловленная давлением газа на поршень двигателя внутреннего сгорания
Вопрос 28. Какие из сил, действующих на звенья механизма, возникают только при его движении?
Ответы:
силы трения
силы упругости пружин
усилия в кинематических парах
силы инерции звеньев
Вопрос 29. Какие из сил остаются постоянными во всех положениях механизма?
Ответы:
силы инерции
силы упругости пружин
силы тяжести
реакции в кинематических парах
Вопрос 30. Метод рычага Жуковского основан на
Ответы:
равенстве работ на возможных перемещениях механизма и модели
равенстве мощностей, развиваемых механизмом и его моделью
равенстве угловых скоростей модели и ведущего звена
равенстве линейных скоростей модели и механизма
Тема "Кинематический анализ рычажных механизмов"
Вопрос 1. Какой из методов кинематического анализа дает наибольшую точность?
Ответы:
1. Графический
2. Аналитический
3. Графо-аналитический
4. Экспериментальный
Вопрос 2. Векторы каких скоростей (ускорений) исходят из полюса плана скоростей (плана ускорений)?
Ответы:
1. Абсолютных скоростей
2. Относительных скоростей
3. Абсолютных ускорений
4. Относительных ускорений
Вопрос 3. Как направлен вектор скорости точки А кривошипа ОА при известном направлении его вращения?
Ответы:
1. Параллельно звену ОА к центру вращения
2. Перпендикулярно к звену ОА в сторону его вращения
3. Параллельно звену ОА в сторону от центра вращения
4. Перпендикулярно к звену ОА в сторону, противоположную его вращению
Вопрос 4. Как направлено ускорение точки А кривошипа ОА, если его угловая скорость постоянна?
Ответы:
1. Параллельно звену ОА к центру вращения
2. Перпендикулярно к звену ОА в сторону его вращения
3. Параллельно звену ОА в сторону от центра вращения
4. Перпендикулярно к звену ОА в сторону, противоположную его вращению
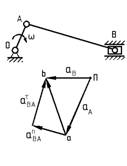
Вопрос 5. Какой вектор на плане скоростей изображает относительную скорость звена АВ?
Ответы:
1. Вектор Пa
2. Вектор Пb
3. Вектор Пc
4. Вектор ab
Вопрос 6. Какой вектор на плане скоростей изображает скорость точки С звена АВ?

Ответы:
Вектор Пa
Вектор Пb
Вектор Пc
Вектор ab
Вопрос 7. С помощью какой скорости можно определить угловую скорость звена АВ?
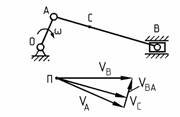
Ответы:
Скорость точки А
Скорость точки B
Скорость точки C
Относительная скорость звена АВ
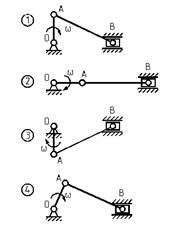
Вопрос 8. Для какого положения механизма скорость точки А равна скорости точки В?
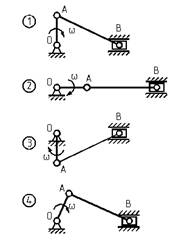
Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
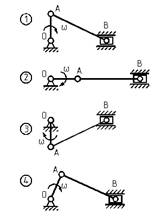
Вопрос 9. Для какого положения механизма скорость точки В равна нулю?
Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
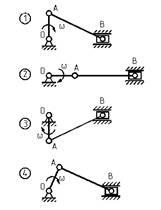
Вопрос 10. Для какого положения механизма скорость точки А равна относительной скорости звена АВ?
Ответы:
Положение 1
Положение 2
Положение 3
Положение 4
Вопрос 11. Для какого положения механизма относительная скорость звена АВ равна нулю?
Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 12. С помощью какого ускорения можно определить угловое ускорение звена АВ?
Ответы:
1. Ускорение точки А
2. Нормальная составляющая относительного ускорения звена АВ
3. Тангенциальная составляющая относительного ускорения звена АВ
4. Ускорение точки В
Вопрос 13. Направлением какого ускорения определяется направление углового ускорения звена АВ?

Ответы:
1. Нормальной составляющей относительного ускорения звена АВ
2. Тангенциальной составляющей относительного ускорения звена АВ
3. Полного относительного ускорения звена АВ
4. Ускорения точки В
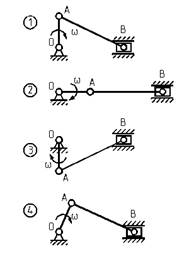
Вопрос 14. Для какого положения механизма угловая скорость звена АВ равна нулю?
Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 15. Для какого положения механизма угловое ускорение звена АВ равна нулю?
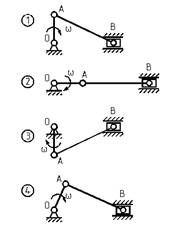
Ответы:
1. Положение 1
2. Положение 2
3. Положение 3
4. Положение 4
Вопрос 16. Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение какого звена этого механизма будет равно нулю?
Ответы:
1. Шатуна
2. Коромысла
3. Кривошипа
4. Ползуна
Вопрос 17. Для какого звена необходимо определять ускорение Кориолиса?
Ответы:
1. Звена, совершающего вращательное движение
2. Звена, совершающего поступательное движение
3. Звена, совершающего сложное движение
4. Звена, совершающего плоскопараллельное движение
Вопрос 18. Какое положение является крайним ("мертвым") для центрального кривошипно-шатунного механизма?
Ответы:
1. Положение, в котором скорость ползуна является максимальной
2. Положение, в котором скорость ползуна является минимальной
3. Положение, в котором скорость ползуна равна нулю
4. Положение, в котором скорость ползуна является средней между максимальной и минимальной
Вопрос 19. Что не входит в задачи кинематического анализа механизмов?
Ответы:
1. Определение положений звеньев и траекторий точек
2. Определение линейных скоростей и ускорений точек
3. Определение угловых скоростей и ускорений звеньев
4. Определение размеров звеньев механизма
Вопрос 20. Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой группы следует начинать кинематический расчет этого механизма?
Ответы:
1. С группы начального звена
2. С группы Ассура, соединенной с группой начального звена
3. С группы Ассура, наиболее удаленной от группы начального звена
4. Порядок расчета не имеет значения
Вопрос 21. Какие параметры подлежат определению при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
Ответы:
1. Координаты внешних кинематических пар
2. Координаты внутренней кинематической пары
3. Длины звеньев группы
4. Угловые положения звеньев
Вопрос 22. Чем определяется показатель сборки при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?