ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 753
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
И
| Изнашивание | процесс разрушения и отделения материала с поверхности твердого тела, проявляющийся в постепенном изменении размеров и формы тела; при этом могут изменяться и свойства поверхностных слоев материала (абразивное, механическое, усталостное, эрозионное). |
| Износ | результат изнашивания в единицах длины, объема или массы. |
| Интерференция зубьев | явление, заключающееся в том, что при рассмотрении теоретической картины зубчатого зацепления часть пространства оказывается одновременно занятой двумя взаимодействующими зубьями. |
| Исполнительный орган (звено) машины | твердое тело, выполняющее в технологических машинах заданные перемещения с целью изменения или контроля формы, размеров и свойств обрабатываемого предмета. |
1 2 3 4 5 6 7 8 9 ... 16
К
| Карданная передача | механизм, состоящий из одного или нескольких карданных валов и карданных шарниров и предназначенный для передачи крутящего момента между агрегатами, оси которых не совпадают и могут изменять свое положение. Для компенсации изменения расстояния между агрегатами трансмиссии в карданной передаче используют подвижные в осевом направлении шлицевые муфты. Карданные шарниры можно разделить: - по кинематике на синхронные (равные угловые скорости) и асинхронные (неравные угловые скорости); - по конструкции на полные, полукарданные — жесткие (угол до 2°) и упругие (угол до 12°). |
| Квазиплоский механизм | пространственный механизм, по своей структуре не имеющий избыточных контурных связей, однако элементы кинематических пар имеют такое расположение в пространстве, при котором звенья совершают сложное движение, достаточно близкое к плоскому движению, параллельному одной и той же неподвижной плоскости. Это позволяет при расчете кинематических и кинетостатических параметров характеристик механизма пользоваться с некоторыми допущениями двухмерными системами отсчета взамен трехмерной системы отсчета. |
| Кинематика | изучает методы определения скоростей, ускорений точек звеньев механизма, а также кинематическое проектирование механизмов по заданным условиям. |
| Кинематический анализ механизма | определение движения звеньев механизма по заданному движению начальных звеньев. Основные задачи: - определение положений звеньев и траекторий отдельных точек; - определение линейных скоростей и ускорений точек и угловых скоростей и ускорений звеньев; - определение передаточных функций или отношений между звеньями. Методы кинематического анализа: - графический – основан на графическом дифференцировании и интегрировании; - аналитические – в общем случае сложны и требуют громоздких вычислений. |
| Кинематический синтез механизма | определение размеров его звеньев по заданным кинематическим свойствам. |
| Кинематическая диаграмма | называется кривая в прямоугольной системе координат, представляющая зависимость какого-либо параметра движения звена от времени или угла поворота ведущего звена. |
| Кинематическая схема механизма | называется графическое изображение механизма с применением условных обозначений звеньев и кинематических пар и с указанием размеров, необходимых для кинематического анализа. |
| Кинематическая пара | соединение двух соприкасающихся звеньев, допускающее их относительное движение (или подвижное соединение двух звеньев). Кинематические пары обозначают заглавными латинскими буквами (A,B,C,D и т.д.).  |
| Кинематическая пара начальная | пара, звеньям которой приписывается одна или несколько обобщенных координат механизма. |
| Кинематическая пара одноподвижная | кинематическая пара с одной степенью свободы в относительном движении ее звеньев. |
| Кинематическая пара приводная | кинематическая пара, в которой звенья перемещаются принудительно посредством привода, смонтированного на них. |
| Кинематическая пара высшая | кинематическая пара, в которой элементом соприкосновения двух звеньев являются точка или линия. 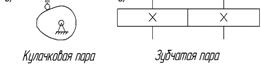 |
| Кинематическая пара низшая | кинематическая пара, в которой элементом соприкосновения двух звеньев является поверхность. 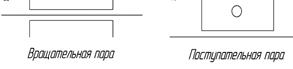 |
| Кинематическая поступательная пара винтовая | одноподвижная пара, допускающая винтовое движение одного звена относительно другого. Число связей – 5, число степеней свободы – 1, 1Ви (Ви)  |
| Кинематическая поступательная пара вращательная | одноподвижная пара, допускающая вращательное движение одного звена относительно другого. Число связей – 5, число степеней свободы – 1, 1В (В)  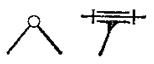 |
| Кинематическая пара плоскостная | трехподвижная пара, допускающая плоское движение одного звена относительно другого. Число связей – 3, число степеней свободы – 3, 3Пл (Пл)   |
| Кинематическая пара поступательная | одноподвижная пара, допускающая прямолинейно – поступательное движение одного звена относительно другого. Число связей – 5, число степеней свободы – 1, 1П (П) 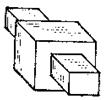  |
| Кинематическая пара сферическая | трехподвижная пара, допускающая сферическое движение одного звена относительно другого. Число связей – 3, число степеней свободы – 3, 3С (С) 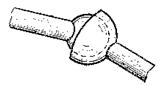  |
| Кинематическая пара сферическая с пальцем | двухподвижная пара, допускающая сферическое движение одного звена относительно другого. Число связей – 4, число степеней свободы – 2, 2Сп (Сп) 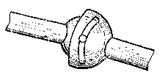  |
| Кинематическая пара шар-плоскость | Число связей – 1, число степеней свободы - 5 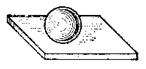  |
| Кинематическая пара цилиндр-плоскость | Число связей – 2, число степеней свободы – 4 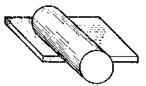  |
| Кинематическая пара цилиндрическая | двухподвижная пара, допускающая вращательное и поступательное (вдоль оси вращения) движения одного звена относительно другого. Число связей – 4, число степеней свободы – 2, 2Ц (Ц) 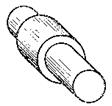  |
| Кинематической пары элемент | совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару. |
| Кинематической пары класс | число связей, наложенных на относительное движение звеньев кинематической пары. В плоских механизмах подвижность пары не связана однозначно с ее классом. |
| Кинематическая цепь | система звеньев, связанных между собой кинематическими парами. |
| Кинематическая цепь открытая | называется кинематическая цепь, звенья которой входят только в одну кинематическую пару.  |
| Кинематическая цепь замкнутая | называется кинематическая цепь, каждое звено которой входит не менее чем в две кинематические пары.  |
| Кинематическая цепь простая | называется кинематическая цепь, в которой все звенья входят не более чем в две кинематические пары. 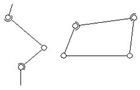 |
| Кинематическая цепь сложная | называется кинематическая цепь, звенья которой входят в три и более кинематические пары. 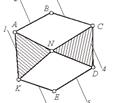 |
| Кинематическая цепь определенная | кинематическая цепь, в которой закон движения ведомых звеньев можно определить по закону движения ведущих. |
| Кинематическая цепь неопределенная | кинематическая цепь, в которой закон движения ведомых звеньев нельзя определить по закону движения ведущих. |
| Кинематическая цепь плоская | кинематическая цепь, в которой точки звеньев описывают траектории, лежащие в параллельных плоскостях. |
| Кинематическая цепь пространственная | кинематическая цепь, в которой точки звеньев описывают неплоские траектории, или траектории лежащие в пересекающихся плоскостях. |
| Кинематическое соединение | кинематическая цепь с числом звеньев более двух, эквивалентная заменяющей кинематической паре, но отличающаяся по своей конструкции. |
| Кинетическая энергия механизма | сумма кинетических энергий его звеньев. У звена, совершающего поступательное движение, кинетическая энергия Звено, совершающее вращательное движение, имеет кинетическую энергию где J – момент инерции звена относительно оси вращения; m – масса звена; v – скорость звена; ω – угловая скорость звена. |
| Кинетостатика | раздел механики, изучающий движение с помощью уравнений движения, записанных в форме уравнений статики с использованием принципа Даламбера. |
| Кинетостатический расчет | силовой расчет механизма, основанный на применении принципа Даламбера. |
| Класс кинематической пары | число связей,наложенных на относительное движение звеньев. |
| Колебания периодические | возникают в механизмах и машинах, в которых силы, действующие на звенья, изменяются в определенной зависимости от угла поворота ведущего звена. К таким машинам относятся двигатели внутреннего сгорания, паровые машины, поршневые насосы и др. Периодические колебания регулируются при помощи маховика. |
| Колебания непериодические | возникают в результате случайного изменения сил полезных сопротивлений. Такие колебания регулируются центробежными регуляторами. |
| Конические зубчатые передачи | передачи с пересекающимися осями колес 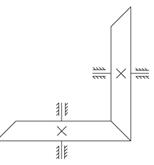 |
| Контур | линия, очерчивающая расположение звеньев в механизме. Механизм может содержать один или несколько замкнутых или незамкнутых контуров. |
| Контур механизма векторный | контур, составленный из геометрических векторов, связанных со звеньями механизма. |
| Коромысло (редко: рычаг) | вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси (звено 4 и 5). 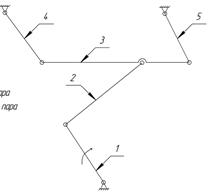 |
| Коронная шестерня Коэффициент неравномерности Коэффициент удельного давления Коэффициент удельного скольжения | центральное колесо, имеющие внутренние зубья. отклонения угловой скорости от среднего уровня. характеризует величину контактных напряжений, возникающих в местах соприкосновения зубьев. характеризует износостойкость зубчатой передачи в высшей КП. |
| Коэффициент неравномерности движения механизма | отношение разности максимального и минимального значений обобщенной скорости механизма к ее среднему значению за один цикл установившегося движения механизма. |
| Коэффициент перекрытия | характеризует непрерывность и плавность зацепления в зубчатой передаче. |
| Коэффициент скольжения | характеризует величину проскальзывания сопряженных профилей зубчатых колес в процессе зацепления |
| К.П.Д. цикловой механизма (????) | отношение полезной работы к работе движущих сил за цикл установившегося движения η=1-ψ, где ψ- коэффициент потерь равный отношению работы сил вредного сопротивления к работе движущих сил η=Апс/Ад. |
| К.П.Д. мгновенный механизма | отношение мощности внешних сил на ведомом звене к мощности внешних сил на ведущем звене. |
| К.П.Д. общий последовательных механизмов | равен произведению К.П.Д. отдельных механизмов η=η1η2…ηm.  |
| К.П.Д. общий параллельных механизмов | равен: 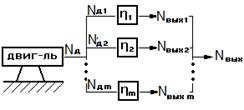 |
| Кривошип (иногда: коленчатый вал, коленвал, эксцентрик, водило) | вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси (звено 1). 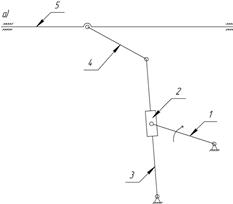 |
| Кривошипно-коромысловый механизм | шарнирный четырехзвенный механизм, в состав которого входит кривошип и коромысло.  |
| Кривошипно-ползунный (кривошипно-шатунный) механизм | рычажный четырехзвенный механизм, в состав которого входят кривошип и ползун. Кривошипно-ползунный механизм служит для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна или, наоборот, возвратно-поступательного движения ползуна во вращательное движение кривошипа.  1 звено – кривошип; это звено, прикреплённое к стойке, совершает полный оборот вокруг неё. 2 звено – коромысло; это звено совершает колебательные движения относительно стойки. 3 звено – шатун; шарнирно связанно с неподвижными звеньями, и совершает плоскопараллельное движение (ползун, поршень). 4 звено – стойка. |
| Кривошипно-кулисный механизм | рычажный четырехзвенный механизм, в состав которого входят кривошип и кулиса. Кривошипно-кулисный механизм служит для передачи и преобразования вращательного движения кривошипа во вращательное или качательное движение кулисы и, наоборот, движение кулисы во вращение кривошипа. |
| Кулачок | звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. |
| Кулачковый механизм | трехзвенный механизм с высшей кинематической парой, в состав которого входит кулачок (входное звено, рабочая поверхность которого имеет переменную кривизну) и толкатель (коромысло, выходное звено). 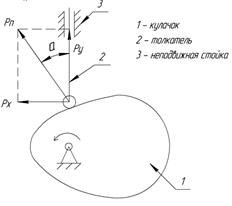 |
| Кулачковый механизм позиционный | кулачковый механизм, предназначенный для перевода ведомого звена из одного положения в другое. |
| Кулачковый механизм функциональный | кулачковый механизм, предназначенный для воспроизведения заданного закона движения ведомого звена. |
| | |
| Кулачковых механизмов классификация | 1. В зависимости от вида относительного движения звеньев: а) плоские (кулачок и толкатель перемещаются в параллельных плоскостях) (рис. 1,а); б) пространственные (кулачок и толкатель перемещаются в непараллельных плоскостях) (рис. 1,б).  Рис.1 2. По видам движения кулачка: а) с поступательно движущимися кулачками (рис. 2,а); б) с вращающимися кулачками (рис. 1,а); в) с качающимися кулачками (рис. 2,б).  Рис. 2 3. В зависимости от характера движения толкателя: а) возвратно-поступательные; б) колебательные; в) сложные. 4. По профилю рабочей поверхности толкателя: а) остроконечный (рис. 3,а); б) роликовый (рис. 3,б); в) плоский (рис. 3,в); г) сферический (рис. 3,г). 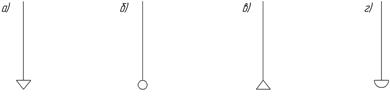 Рис. 3 5. В зависимости от типа кулачка: а) дисковые (рис. 1,а); б) пазовые (рис. 1,б). 6. В зависимости от расположения оси толкателя и центра вращения кулачка: а) центральные (рис. 1,а); б) дезаксиальные (рис. 2,б). |
| Кулачковый распределительный вал | система кулачков с одним общим валом, предназначенная для согласованной работы нескольких выходных звеньев. Каждый кулачок имеет определенный угол установки начальной прямой относительно кулачка, принятого за базовый. |
| Кулиса | подвижное звено механизма, имеющее направляющие, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару (звено 3). 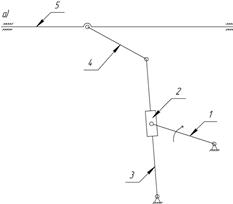 |
| Кулисный механизм |  1 – кривошип; 2 – камень кулисы (втулка) вместе с 3 совершает полный оборот вокруг А (ω1 и ω2 одно и тоже), а также движется вдоль звена 3 приводя его во вращение; 3 – кулиса, неподвижная направляющая для камня. |
1 2 3 4 5 6 7 8 9 ... 16
Л
| Линия зацепления | траектория точки контакта профилей в ее абсолютном движении (т.е. в движении по отношению к неподвижному звену зубчатой передачи). |
М
| Малышева формула | формула определения степени подвижности пространственной кинематической цепи W6= 6n - (5P1+4P2+3P3+2P4+1P5), где n-количество звеньев кинематической цепи; P1,P2,P3,P4,P5- число одно, двух трех, четырех- и пяти-подвижных кинематических пар в кинематической цепи. |
| Манипулятор | устройство, дистанционно управляемое оператором и программным устройством, содержащее рабочий орган, который предназначен для имитации перемещений и рабочих функций кисти руки человека. |
| Масштабный коэффициент | отношение численного значения физической величины в свойственных ей единицах к длине отрезка в миллиметрах, изображающего эту величину. |
| Маховик | вращающееся тело, характеризующееся добавочным моментом инерции и предназначенное для уменьшения коэффициента неравномерности движения механизма. Маховик выполняют в виде массивного сплошного диска или шкива с тяжелым ободом и спицами. Маховик аккумулирует энергию при увеличении угловой скорости и отдает ее при уменьшении скорости.  |
| Машина | устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека. |
| Машина-автомат | машины, совершающие технологический процесс и связанные с ним транспортные операции без участия человека. |
| Машина-двигатель | энергетическая машина, предназначенная для преобразования энергии любого вида в механическую энергию твердого тела. |
| Машина-генератор | энергетическая машина, предназначенная для преобразования механической энергии твердого тела в энергию любого вида. |
| Машина информационная | машина для получения и преобразования информации. |
| Машина технологическая | машина, предназначенная для преобразования обрабатываемого предмета, состоящего в изменении его размеров, формы, свойств или состояния. |
| Машина транспортная | машина, предназначенная для перемещения людей и грузов. |
| Машина энергетическая | машина, предназначенная для преобразования энергии. |
| Машинный агрегат | техническое объединение двигателя и технологической (рабочей машины). |
| Метод обращения движения | метод проектирования и исследования механизма, при котором одно подвижное звено условно (мысленно) считается неподвижным при сохранении относительных движений всех других звеньев, входящих в состав механизма, включая и стойку, которая становится подвижным звеном. |
| Метод замкнутых векторных контуров | заключается в следующем: - звенья механизма изображают в виде векторов, которые образуют на схеме механизма один или несколько замкнутых векторных контуров (в соответствии с количеством групп Ассура); - складывают векторные уравнения замкнутости каждого контуру; - выбирают прямоугольную систему координат и проектируют уравнение замкнутости контуров на осе выбранной системы координат. В результате получают аналитические зависимости положения звеньев от обобщенных координат механизма и его размеров, то есть функцию положений звеньев механизма; - дифференцируют дважды по времени уравнение замкнутости контуров в проекциях на осе x, y и получают, соответственно, систему уравнений для определения скоростей и ускорений звеньев механизма. Если дифференцируют по обобщенной координате — получают, соответственно, уравнения для определения аналогов скоростей и ускорений. - определяют координаты, проекции скоростей и ускорений характерных точек механизма. Определяют модули скоростей и ускорений этих точек. |
| Механизм | искусственно созданная замкнутая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначные движения или система тел, предназначенная для преобразования движения одних тел (одного или нескольких) в требуемое движение других. Например: механизм подачи заготовок, механизм сцепления, механизм торможения и т.д. |
| Механизм 1 класса | простой механизм, состоящий из одного подвижного звена, образующего с неподвижным звеном низшую кинематическую пару  |
| Механизм гидравлический | называется механизм, в котором преобразование движения происходит посредством как твердых тел, так и жидкости. |
| Механизм пневматический | в случаях, когда промежуточной средой является газ, речь идет о пневматических механизмах. Тогда насос заменяется на источник сжатого воздуха, а вместо соединения с резервуаром, выполняется выход в атмосферу. |
| Механизм мальтийский | это механизм, предназначенный для преобразования непрерывного движения звена 1 (кривошип) во вращательное движение звена 2 (мальтийский крест) с периодическими остановками (см.рис.). Обычно мальтийский крест имеет от 4 до 20 пазов, а также один или два кривошипа. Конструктивно звено 1 состоит из двух деталей: кривошипа с роликом и запорной шайбы. Звено 1 совершает непрерывное вращательное движение, при этом один оборот звена имеет две фазы движения: рабочий ход и холостой ход. Во время рабочего хода кривошип звена 1 поворачивает на определенный угол мальтийский крест, а во время холостого хода мальтийский крест должен быть неподвижен, что обеспечивается запорной шайбой. 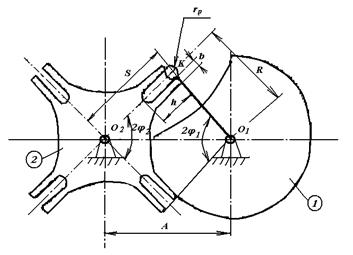 |
| Механизм передаточный | механизм, обеспечивающий воспроизведение заданной функциональной зависимости между перемещениями входных и выходных звеньев. Примеры передаточных механизмов (зубчатый и планетарный): 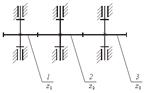  |
| Механизм точный направляющий | механизм, в котором траектория некоторой точки звена, образующего кинематические пары только с подвижными звеньями, точно совпадает с заданной кривой на отдельном участке или на всем ее протяжении. Примеры точных прямолинейно-направляющих механизмов: 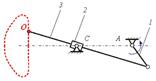 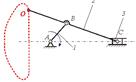 |
| Механизм приближенный направляющий | механизм, в котором траектория некоторой точки звена, образующего кинематические пары только с подвижными звеньями, мало отличается от заданной кривой на отдельном участке или на всем ее протяжении. |
| Механизм фрикционный | механизмы, в которых для передачи движения между соприкасающимися звеньями используется трение. Существуют фрикционные механизмы с постоянным и регулируемым передаточным отношением. |
| Модуль зубьев | линейная величина в π раз меньше шага зубьев. |
| Момент инерции звена | мера инертности звена во вращательном движении, равная сумме произведений масс частиц тела на квадраты их расстояний до плоскости, оси или точки. |
| Моментная неуравновешенность | характеризуется тем, что центр масс ротора расположен на оси его вращения, главная центральная ось инерции повернута относительно оси вращения на некоторый угол γ. |
| Мультипликатор | повышающая передача, включающая в себя систему взаимодействующих колес, заключенных в единый корпус. |
Н
| Начальный механизм (механизм 1-го класса) | группа звеньев, состоящая из входного звена и стойки. Начальный механизм обладает одной степенью подвижности и дальнейшее наслоение кинематических цепей не должно изменять степени подвижности всего механизма. Варианты начальных механизмов 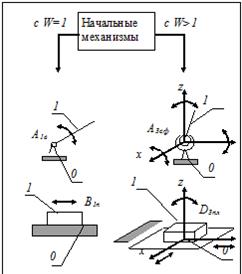 |
| Начальный радиус кулачка | минимальный радиус-вектор центрового профиля кулачка. |
| Начальное звено | звено, которому приписывается одна или несколько обобщенных координат. Обычно за начальные принимаются входные звенья механизма, которым сообщается заданное движение. |
| Неуравновешенность ротора | состояние ротора, характеризующееся таким распределением масс, которое во время вращения вызывает переменные нагрузки на опорах ротора и его изгиб. |
| Неуравновешенность статическая | неуравновешенность, при которой ось ротора и его главная центральная ось инерции параллельны. 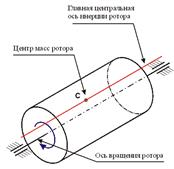 |
| Неуравновешенность моментная | неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются в центре масс ротора.  |
| Неуравновешенность динамическая | неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются не в центре масс или перекрещиваются. Она состоит из статической и моментной неуравновешенности. 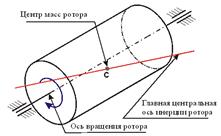 |
О
| Обобщенные координаты | совокупность координат, независимых друг от друга и полностью определяющих положение всех звеньев механизма в любой момент времени. Число обобщенных координат равно числу подвижностей механизма. В качестве обобщенных координат могут служить любые переменные координаты, определяющие положение звеньев. Примеры обобщенных координат:  а б в а – механизм с одной подвижностью и угловой обобщенной координатой; б – механизм с одной подвижностью и линейной обобщенной координатой; в– механизм с двумя подвижностями, имеющий два начальных звена |
| Огибания способ (нарезание зубчатых колес) | способ формообразования зубьев зубчатых колес, при котором боковые поверхности зубьев образуются как огибающие последовательных положений режущей кромки зуборезного инструмента (червячной фрезы, долбяка, зуборезной гребенки). |
| Одноподвижная пара | кинематическая пара с одной степенью свободы в относительном движении ее звеньев. Одноподвижными являются поступательная, вращательная и винтовая пары. |
| Окружность вершин | окружность наибольшего диаметра (проходящая через вершины зубьев) De  |
| Окружность впадин | окружность, ограничивающая тело зубчатого колеса от стороны его зубьев Di  |
| Окружность делительная | окружность, которая делит зуб на две части (Dд) 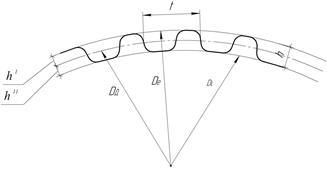 |
П
| Передаточное отношение | отношение угловой скорости ведущего звена к угловой скорости ведомого звена (i) |
| Передаточное отношение зубчатой передачи ijk | называется отношение угловой скорости j-го зубчатого колеса к угловой скорости k-го зубчатого колеса |
| Питч | отношение числа зубьев колеса к делительному диаметру в дюймах (используется вместо модуля зубьев в странах с дюймовой системой мер). |
| План положений механизма | графическое изображение взаимного расположения звеньев механизма в определенный момент времени. |
| План скоростей звена | называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные скорости точек звена плоского механизма, а отрезки, соединяющие концы лучей, – относительные скорости соответствующих точек при данном положении звена. |
| План скоростей механизма | называется совокупность планов скоростей звеньев механизма с одним общим полюсом. |
| Плана скоростей свойства | – фигура на плане скоростей, образованная векторами относительных скоростей, подобна фигуре на звене, образованной отрезками, соединяющими соответствующие точки; – план скоростей дает возможность находить угловую скорость звена. Для этого нужно относительную скорость между любыми двумя точками, лежащими на одном звене, разделить на расстояние между этими точками: – по плану скоростей можно найти положение мгновенного центра скоростей звена, т. е. точки на звене, скорость которой в данный момент равна нулю; – на плане скоростей можно найти направления касательных и нормалей к траекториям точек без построения самих траекторий. |
| План ускорений звена | называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные ускорения точек звена плоского механизма, а отрезки, соединяющие концы лучей, – относительные ускорения соответствующих точек при данном положении звена. |
| План ускорений механизма | называется совокупность планов ускорений звеньев механизма с одним общим полюсом. |
| Плана ускорений свойства | – фигура на плане ускорений, образованная векторами относительных ускорений, подобна фигуре на звене, образованной отрезками, соединяющими соответствующие точки; – план ускорений позволяет определять угловые ускорения звеньев. Для этого необходимо относительное касательное ускорение между любыми двумя точками звена разделить на расстояние между этими точками: – по плану ускорений можно найти положение мгновенного центра ускорений звена, т. е. точку на звене, ускорение которой в данный момент равно нулю; – план ускорений дает возможность находить радиусы кривизны траекторий без их построения. |
| Планетарный механизм | называется эпициклический механизм, имеющий в своем составе хотя бы одно звено с подвижной геометрической осью в пространстве и степень подвижности равным 1. |
| Плоский механизм | механизм, точки звеньев которого описывают траектории, лежащие в параллельных плоскостях. |
| Плоскостная пара | трехподвижная пара, допускающая плоское движение одного звена относительно другого. |
| Пневмомашина | энергетическая машина, предназначенная для преобразования механической энергии твердого тела в механическую энергию газа (или наоборот). |
| Поверхность зуба боковая | поверхность, ограничивающая зуб со стороны впадины. |
| Поводок | звено, входящее в группе в две кинематические пары, одна из которых свободная и служит для присоединения к одному из подвижных звеньев механизма или к стойке. |
| Подвижность кинематической пары | число степеней свободы в относительном движении ее звеньев. Различают одно-, двух-, трех-, четырех- и пятиподвижные кинематические пары. |
| Подвижности механизма | это независимые возможные перемещения его звеньев. Число подвижностей механизма и число степень свободы механизма синонимы. Подвижность разомкнутой кинематической цепи равна сумме подвижностей, допускаемых ее кинематическими парами (манипулятор, приведенный на рисунке имеет 5 подвижностей). 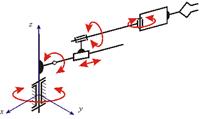 Число подвижностей плоских механизмов W=3n-2pн-2pв где n –число подвижных звеньев pн – число низших кинематических пар в механизме pв – число высших кинематических пар в механизме. Число подвижностей пространственных механизмов W=6n-5p5-4p4-3p3-2p2-p1 где pi – число кинематических пар i-класса в механизме, i=1, 2, …5. |
| Подвижность механизма местная | подвижность одного звена, не влияющая на перемещения других звеньев. Пример – подвижность ролика 3 толкателя 2 кулачкового механизма.  |
| Подрезание ножки зуба | срезание части номинальной поверхности у основания зуба обрабатываемого зубчатого колеса в результате интерференции зубьев при станочном зацеплении. |
| Полезная работа механизма | работа движущих сил за вычетом работы, затраченной на преодоление сил вредного сопротивления в механизме. |
| Ползун | (поршень – в двигателях и компрессорах, толкатель – в кулачковых механизмах, суппорт – в станках, кулисный камень) – звено образующее поступательную пару с неподвижным другим звеном (чаще всего со стойкой) (звено 5).  |
| Полное уравновешивание плоского механизма | производится с помощью противовесов, подобранных и установленных так, чтобы сумма сил инерции всех звеньев (включая и силы инерции противовесов) и сумма моментов этих сил относительно любой точки равнялись бы нулю. |
| Полюс зацепления (зубчатой передачи) | точка или одна из точек касания начальных поверхностей зубчатых колес передачи. |
| Поступательная пара | одноподвижная пара, допускающая прямолинейно-поступательное движение одного звена относительно другого. |
| Приведенная масса mпр | масса, сосредоточенная в одной точке (называемой точкой приведения), кинетическая энергия которой равна кинетической энергии механизма: |
| Приведенный момент инерции механизма | момент инерции, которым должно обладать одно из звеньев механизма (звено приведения) относительно оси вращения, чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев.  где – угловая скорость вала приведения. |
| Приведенный момент сил | момент сил, условно приложенный к звену приведения и определяемый из условия равенства его элементарной работы (мощности) сумме элементарных работ (мощностей) сил и моментов сил, действующих на звенья механизма. |
| Приведенная сила | сила условно приложенная к точке приведения и определяемая из условия равенства ее элементарной работы (мощности) сумме элементарных работ (мощностей) сил и моментов сил, действующих на звенья механизма. Различают «приведенную движущую силу», «приведенную силу сопротивления», «приведенную силу инерции» и др. |
| Приведенная пара сил | пара сил, условно приложенная к одному из звеньев механизма (звену приведения) и определяемая из равенства элементарной работы этой пары сил сумме элементарных работ сил и пар сил, действующих на звенья механизма. Различают «приведенную пару движущих сил», «приведенную пару сил сопротивления», «приведенную пару сил инерции» и др. |
| Привод машины | система, состоящая из двигателя и связанных с ним устройств для приведения в движение одного или нескольких твердых тел, входящих в состав машины. |
| Принцип Даламбера | при движении механической системы активные силы, реакции связей и силы инерции образуют равновесную систему сил в любой момент движения. |
| Принцип освобождаемости от связей | замена действия связей реакциями связей при составлении кинетостатических уравнений движения механизма. |
| Программа машины | совокупность предписаний, обеспечивающих выполнение технологического процесса в машине. |
| Производящий исходный контур | проекция режущей грани инструмента на плоскость, перпендикулярную оси вращения заготовки. |
| Промышленный робот | манипулятор с изменяемой программой, представляющий собой автономно функционирующую машину-автомат, предназначенную для воспроизведения некоторых двигательных и умственных функций человека при выполнении вспомогательных и основных производственных операций. |
| Пространственный механизм | механизм, точки звеньев которого описывают пространственные траектории или траектории, лежащие в пересекающихся плоскостях. |
| Профили сопряженные | профили, обеспечивающие заданное угловое передаточное отношение. |
| Профиль зуба | линия пересечения боковой поверхности зуба с плоскостью, перпендикулярной к оси вращения колеса |