ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.10.2023
Просмотров: 761
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Р
| Расстояние межосевое (передачи) | кратчайшее расстояние между осями вращения колес. |
| Расчет кулачка | расчет координат центрового или конструктивного профиля кулачка по заданному закону движения толкателя с учетом ограничений, накладываемых на параметры механизма, например, конструктивные ограничения, ограничения величины углов давления и др. |
| Реакции связей | силы, учитывающие эффект действия связей и действующие на материальные точки механической системы со стороны материальных тел, осуществляющих связи, наложенные на эту систему. |
| Редуктор зубчатый | понижающая передача, обычно включающая в себя систему взаимосвязанных звеньев, заключенных в единый корпус. При использовании в редукторе зубчатых передач называется зубчатый редуктор. |
| Режим разбега механизма | переходное движение между покоем и установившимся движением механизма. Условие существования режима разбег: Ад>|Ас|. |
| Режим выбега механизма | переходное движение между установившимся движением механизма и покоем. Условие существования режима выбега: Ад<|Ас|. |
| Режим установившегося движения механизма | движение при котором кинетическая энергия механизма постоянна или является периодической функцией времени. Условие существования установившегося движения: Ад=|Ас|. Ад - работа движущих сил; Ас - работа сил сопротивления. |
| Резонанс | резкое возрастание амплитуды установившихся вынужденных колебаний системы, когда частота внешнего взаимодействия на систему приближается к какой-либо частоте ее собственных колебаний. |
| Рейка | Зубчатое колесо с теоретически бесконечно большим количеством зубьев. Как привило, их бывает 8. |
| Робот | машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека при взаимодействии с окружающим миром. |
| Ротор | тело любой геометрической формы, имеющее свое основное движение – движение вращения (коленвал, колесо турбины и т.д.) и опирающееся на две опоры. |
| Рычаг Жуковского | воображаемый рычаг переменной конфигурации, фигура которого в каждом положении механизма подобна плану скоростей, повернутому на в любую сторону и закрепленному в полюсе плана скоростей. Силы приложены в точках, одноименных с точками приложения этих сил в механизме. |
| Рычажный механизм | механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары. Примерами рычажного механизма являются кривошипно-ползунный механизм, кулисный механизм и др.  |
1 2 3 4 5 6 7 8 9 ... 16
С
| Самоторможение | явление, при котором из-за сил трения относительное движение звеньев не может начаться, как бы ни велики были движущие силы. |
| Сателлит | зубчатое колесо z1 планетарной передачи с подвижной осью вращения. Сателлит одновременно вращается вокруг своей оси и совершает движение вместе с водилом.  |
| Связи | ограничения, налагаемые на положения и скорости твёрдого тела или материальной точки, которые должны выполняться при любых действующих на механическую систему силах. Всякую связь можно отбросить и заменить силой-реакцией связи или системой сил в общем случае. Связи в механизмах осуществляются с помощью элементов контактирующих звеньев в кинематической паре, гибких элементов, магнитного поля и т .д. |
| Связи избыточные | это связи, устранение которых не изменяет подвижность механизма. Отклонения в расположении связей компенсируются деформациями звеньев, износом контактирующих поверхностей, зазорами между элементами пар, повышенной точностью изготовления и сборки звеньев, кромочным контактом элементов пар. Структурная схема механизма без избыточных связей называется основной схемой. Количество избыточных связей в пространственном механизме: q=(W+5p5+4p4+3p3+2p2+p1)-6n где W- число подвижностей pi – число кинематических пар i-класса в механизме, i=1, 2, …5 n- число подвижных звеньев. |
| Солнечное (центральное) зубчатое колесо | зубчатое колесо z2, вокруг оси которого вращается сателлит  |
| Сила приведенная | сила, условно приложенная к одной из точек механизма, работа которой на ее элементарном перемещении равна сумме работ всех реальных сил на их элементарных перемещениях. |
| Сила уравновешивающая | сила, равная приведенной, но противоположно направленная. |
| Силы движущие | силы, приложенные к ведущему звену механизма и совершающие механическую работу. |
| Силы инерции | силы обратного воздействия ускоряемого тела на тела, вызывающие его ускорение Ри = –mа, где m – масса тела; а – ускорение центра тяжести. |
| Силы вредного сопротивления | силы, приложенные к звеньям механизма и совершающие отрицательную работу (не являющуюся работой полезных сопротивлений, которая также отрицательна). Силы вредных сопротивлений делятся на силы трения и силы сопротивления среды. |
| Силы полезного сопротивления | силы сопротивления, совершающие работу, требуемую от механизма. |
| Силы сопротивления | это те силы из числа приложенных к звеньям механизма, которые стремятся замедлить движение ведущего звена, их элементарная работа отрицательна. Различают силы полезного и вредного сопротивления. |
| Силы реактивные (реакции) | силы, возникающие в кинематических парах и представляющие собой давление звеньев друг на друга. |
| Силы тяжести | вес самой машины и вес ее звеньев. |
| Силы трения | сопротивление, возникающее на поверхности двух соприкасающихся тел при относительном их движении. Сопротивление возникает в результате шероховатости соприкасающихся тел, в зоне фактического контакта происходит сцепление, возникают упругие, вязкие и пластические деформации, развиваются силы молекулярного взаимодействия. По видам относительного движения различают: трение скольжения (в высших и низших кинематических парах) и трение качения (в высших парах). |
| Силовой анализ механизма | определение реактивных и движущих сил |
| Синтез механизма | проектирование схемы механизма по заданным его свойствам. Синтез включает в себя выбор структурной схемы и определение постоянных параметров выбранной схемы механизма по заданным его свойствам. Различают: структурный синтез механизмов – выбор его схемы; метрический синтез – нахождение размеров звеньев и динамический синтез – распределение масс звеньев. |
| Синтез механизма по Чебышеву | синтез механизмов по методу наилучшего равномерного приближения функций. |
| Синтез рычажных механизмов | осуществляется последовательным присоединением групп Ассура к начальному механизму. Проводят по - требуемым положениям звеньев (максимальное число задаваемых положений не более 5); - средней скорости движения выходного звена; - коэффициенту изменения средней скорости выходного звена. |
| Синтез динамический | проектирование кинематической схемы механизма с учётом его динамических свойств, в том числе и распределения масс звеньев. |
| Синтез кинематический | проектирование кинематической схемы механизма. |
| Синтез структурный | проектирование структурной схемы механизма. |
| Система управления машины | система, обеспечивающая согласованность перемещений всех исполнительных органов в соответствии с заданной программой машины. |
| Смещение исходного контура | это кратчайшее расстояние между средней линией рейки и делительной окружностью нарезаемого колеса. В зависимости от величины коэффициента смещения различают три вида зубчатых колес: нулевое колесо (х=0) для него толщина зуба по делительной окружности = ширине впадины; положительное (х>0) колесо для него толщина зуба по делительной окружности > ширины впадины; отрицательное (х<0) колесо для него толщина зуба по делительной окружности < ширины впадины. |
| Солнечное колесо | центральное колесо, имеющее внешние зубья. |
| Сопряженные поверхности | поверхности, которые постоянно или с определенной периодичностью входят в зацепление друг с другом. |
| Станочное зацепление | зацепление заготовки и инструмента. |
| Статическая неуравновешенность | характеризуется тем, что главная центральная ось инерции ротора расположена параллельно оси его вращения, а центр масс ротора смещен от оси вращения на величину е статическое. |
| Статическое уравновешивание масс механизма | распределение масс звеньев, переводящее его центр масс в точку, неподвижную относительно стойки. |
| Степень подвижности механизма | целое число (W), показывающее сколько независимых движений нужно подвести к механизму, чтобы на выходе получить одно или наоборот. Большинство механизмов имеет степень подвижности W = 1; у дифференциальных механизмов W = 2; у роботов и манипуляторов W = 4 – 8 (чаще всего у них W = 4), также как и у основного механизма экскаватора. Степень подвижности W плоских механизмов определяется по формуле Чебышева W = 3n – 2P5 – P4, где n – число подвижных звеньев; Р5, Р4 – число кинематических пар 4, 5 классов; 1, 2, 3 – число исключаемых степеней свободы. |
| Степень подвижности кинематической пары | целое число, показывающее сколько независимых движений позволяет делать данная пара одному звену относительно другого. По степени подвижности пары делят на: одноподвижные, двухподвижные, трехподвижные, четырехподвижные и пятиподвижные. |
| Стойка (редко: корпус, рама, станина, основание) | звено, принимаемое за неподвижное |
| Структурная группа | кинематическая цепь, число степеней, свободы которой равно нулю относительно элементов ее внешних пар и которая не может распадаться на более простые структурные группы. Структурные группы могут быть однозвенными (с двумя или большим числом кинематических пар разной подвижности), двухзвенными и многозвенными. Структурная группа удовлетворяет следующим условиям: плоская группа 3n=2p1-p2 пространственная группа 6n=5p1+4p2+3p3+2p4+p5 Здесь n — число звеньев в группе; p1, p2,…, p5 — число кинематических пар, подвижность которых указана цифровым индексом. |
| Структурная схема механизма | схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Может изображаться графически, либо цифровой, либо буквенно-цифровой записью. |
| Структурный синтез механизма | это определение структуры механизма подходящей для выполнения заданного назначения |
| Структурный анализ механизма | это определение количества звеньев и кинематических пар, классификация кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма. |
| Сферическая (с пальцем) двухподвижная пара | двухподвижная пара, допускающая сферическое движение одного звена относительно другого. |
| Сферическая трехподвижная | трехподвижная пара, допускающая сферическое движение одного звена относительно другого. |
Т
| Тактограмма машины | схема согласованности перемещений исполнительных органов в зависимости от их положения. |
| Такт движения | промежуток времени, в течение которого не меняется состояние (наличие или отсутствие движений) ни одного из исполнительных органов. |
| Теорема Грасгофа | наименьшее звено является кривошипом, если сумма длин его и любого другого звена меньше суммы длин остальных звеньев. |
| Теорема плоского зацепления | общая нормаль в точке контакта сопряженных профилей в любой момент зацепления должна проходить через полюс зацепления, положение которого на межосевой линии определяется заданным передаточным относительным движением звеньев. (Для обеспечения заданного углового передаточного отношения общая нормаль к профилям в точке их зацепления должна делить линию межосевого расстояния на отрезки, обратно пропорциональные угловым скоростям колес). |
| Теорема подобия | концы векторов абсолютных скоростей (ускорений) точек звена образуют на плане скоростей (плане ускорений) фигуру подобную фигуре, образованной одноименными точками звена. |
| Теория машин и механизмов (ТММ) | наука, изучающая строение, кинематику и динамику механизмов и машин в связи с их анализом и синтезом. ТММ включает три основные части: 1. Структурный и кинематический анализ механизмов - изучение теории строения механизмов, исследование движения тел образующих механизм с точки зрения геометрии без учета сил, вызывающих движение этих тел. 2. Синтез механизмов - проектирование механизмов по заданным кинематическим и динамическим условиям. 3. Динамический анализ механизмов - определение сил, действующих на звенья механизма во время их движения, изучение взаимосвязи между движениями тел, их массами и силами действующими на них. |
| Траектория точки | кривая, по которой перемещается точка звена во время работы механизма |
| Трансформирующая машина | техническое устройство, потребляющее энергию извне и совершающее полезную работу. Например, насосы, станки, прессы. |
| Трение внешнее | называется противодействие относительному перемещению соприкасающихся тел в направлении, лежащем в плоскости их соприкосновения. |
| Трение полужидкостное | называется внешнее трение, при котором между трущимися поверхностями соприкасающихся тел есть тонкий (порядка 0,1 мкм и менее) слой смазки, обладающий свойствами, отличными от ее обычных свойств. |
| Трение сухое | называется внешнее трение, при котором трущиеся поверхности соприкасающихся тел покрыты пленками окислов и адсорбированными молекулами газов или жидкостей, а смазка отсутствует. |
| Толкатель | звено кулачкового механизма, взаимодействующее с рабочей поверхностью кулачка своим наконечником (башмаком), который может быть острым (точечный или линейный), плоским, грибовидным и роликовым, и совершающее поступательное или вращательное движение. Звено 1, образующее с кулачком 2 кинематическую пару.  |
У
| Угол давления ???? | называется угол между направлением силы и направлением перемещения, вызванного этой силой. Составляющая сила Ру является движущей силой для толкателя и определяется по формуле Ру = Рncosα. Составляющая сила Рх прижимает толкатель к направляющей и определяется по формуле Рх = Рnsinα. С увеличением угла давления увеличиваются потери энергии на трение. Значения его не должны превосходить допускаемых значений, устанавливаемых в зависимости от типа механизма и условий его работы. |
| Угол профиля | угол между касательной к эвольвенте в данной точке и радиус-вектором данной точки. |
| Уравнительное смещение инструмента | расстояние между граничной прямой инструмента и окружностью вершин заготовки. |
| Уравновешенный механизм | механизм, для которого главный вектор и главный момент сил давления стойки на фундамент (или опору стойки) остаются постоянными при заданном движении начальных звеньев. |
| Уравновешивание механизма | распределение масс звеньев или подбор внешних сил, действующих на звенья механизма, при которых механизм становится уравновешенным. |
| Уравновешивание масс механизма | распределение масс звеньев, устраняющее давление стойки на фундамент (или опору стойки) от сил инерции звеньев. |
| Уравновешивание сил инерции | Если привести силы инерции всех звеньев к центру тяжести механизма, то приведенная сила инерции |
| Уравновешивание вращающегося звена полное | распределение масс вращающегося звена, устраняющее давление от сил инерции этого звена на стойку. |
| Уравновешивание вращающегося звена статическое | распределение масс вращающегося звена, переводящее его центр масс на ось вращения. |
| Условия связи | ограничения, накладываемые на независимые движения звеньев, образующих кинематическую пару. |
| Установившееся движение механизма | движение механизма, при котором его кинетическая энергия является периодической функцией времени. |
| Установившегося движения механизма цикл | период изменения кинетической энергии. |
Ф
| Функция положения механизма | зависимость координаты выходного звена от обобщенных координат механизма. 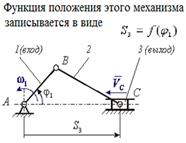 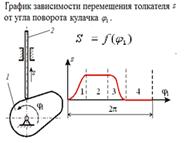 |
| Фазы движения толкателя | удаление, выстой при максимальном удалении, сближение, выстой при минимальном сближении к оси вращения кулачка. Соответствующие углы профиля кулачка обозначают φУ, φД, φC, φБ. Рабочий угол профиля равен сумме первых трех фаз: φР= φУ+φД+φC. |
| Формула Сомова-малышева | Производится расчет степени свободы пространственных механизмов W=6n-5p5-4p4-3p3-2p2-p1, где n- число подвижных звеньев; p5,p4,p3,p2,p1- число кинематических пар пятого, четвертого, третьего, второго и первого классов соответственно. |
| Формула Чебышева | Производится расчет степени свободы плоских механизмов W=3n-2p5-p4 Степень свободы плоского механизма должна быть равна числу ведущих звеньев, то есть W=1. |
Ц
| Центровой профиль кулачка | траектория центра ролика на толкателе относительно конструктивного профиля кулачка. |
| Центроида | геометрическое место мгновенных центров скоростей звеньев, движущихся относительно друг друга. |
| Центр тяжести механизма | называется общий центр тяжести всех его подвижных звеньев без стойки. |
| Центральные зубчатые колеса | зубчатые колеса, имеющие неподвижную геометрическую ось в пространстве. |
| Цикл | промежуток времени, по истечению которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться. |
| Циклограмма машины | схема согласованности перемещений исполнительных органов в зависимости от времени. |
| Цилиндрическая пара | двухподвижная пара, допускающая вращательное и поступательное (вдоль оси вращения) движение одного звена относительно другого. |
| Цилиндрические зубчатые передачи | передачи с параллельными осями колес  Цилиндрические передачи классифицируют: - по пространственному расположению – на внешние, внутренние и реечные. - по форме зуба – на прямо- и косозубые. У первых линия зуба паралл. оси колеса, у вторых – расположена под углом. - по боковой поверхности – на эвольвентные, зацепление Новикова (боковая поверхность очерчена по дуге окружности) и др. - по передаточному отношению. |