ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 619
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
АРХИТЕКТУРЫ, ХАРАКТЕРИСТИКИ, КЛАССИФИКАЦИЯ ЭВМ
3. ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ
4. ПРИНЦИПЫ ОРГАНИЗАЦИИ ПОДСИСТЕМЫ ПАМЯТИ ЭВМ И ВС
ОРГАНИЗАЦИЯ СИСТЕМНОГО ИНТЕРФЕЙСА И ВВОДА/ВЫВОДА ИНФОРМАЦИИ
МНОГОПРОЦЕССОРНЫЕ И МНОГОМАШИННЫЕ ВЫЧИСЛИТЕЛЬНЫЕ СИСТЕМЫ
tизд =tз + tв.
-
Глубина прерывания – максимальное число программ, которые могут прерывать друг друга. На рис. 2.32 показаны процессы прерыва- ния в системах с различной глубиной прерывания (предполагается, что приоритет каждого последующего запроса выше предыдущего). Если после перехода к прерывающей программе и вплоть до ее окончания прием запросов прекращается, то говорят, что система имеет глубину прерывания, равную 1 (относительная дисциплина обслуживания).
 Запросы прерывания
Запросы прерыванияВыполнение прерывающих программ с
n = 1
Выполнение прерывающих
1 2 3
1
2 3
3
t
Относительная
t дисциплина обслуживания
программ с 2
n = 3
1
2
Абсолютная
1 дисциплина
t обслуживания
Рис. 2.32. Процессы прерывания с различной глубиной прерывания и дисциплиной обслуживания
Глубина равна n, если допускается последовательное прерывание до n прерывающих программ (абсолютная дисциплина обслуживания). Глубина прерывания обычно совпадает с числом уровней приоритета в системе прерывания. Система с большим значением глубины преры- вания обеспечивает более быструю реакцию на срочные запросы.
Если запрос окажется не обслуженным к моменту прихода нового запроса от того же источника, то возникает так называемое насыщение системы прерывания. В этом случае предыдущий запрос от данного источника будет машинально утерян, что недопустимо. Существуют специальные методы борьбы с этой ситуацией.
Программно-управляемый приоритет прерывающих программ
Относительная степень важности программ, их частота повторения, относительная степень срочности в ходе вычислительного процесса мо- гут меняться, требуя установления новых
приоритетных отношений. Поэтому во многих случаях приоритет между прерывающими програм- мами не может быть зафиксирован раз и навсегда. Необходимо иметь возможность изменять, по мере необходимости, приоритетные соотно- шения программным путем. Приоритет между прерывающими про- граммами должен быть динамичным, т.е. программно управляемым.
В ЭВМ широко применяется способ маскирования прерываний.
Существуюбт два специальных внешних сигнала среди входных сигналов процессора, при помощи которых можно прервать выполнение текущей программы и тем самым переключить работу центрального процессора. Это сигналы NMI (Non Mascable Interrupt, немаскируемое прерывание) INTR (INTerrupt Request, запрос на прерывание).
Соответственно внешние прерывания подразделяются на два вида: немаскируемые и маскируемые.
Маска прерывания представляет собой двоичный код, разряды которого поставлены в соответствие запросам или классам (уровням) прерывания. Маска загружается командой программы в регистр маски (рис. 2.33).
Запросы прерываний
 РгЗП
РгЗП&
&
&
.
.
INTR
Схема выделения незамаски- рованного запроса
с высшим приоритетом
Код приоритет- ного запроса

 РгМ
РгМКод маски
Рис. 2.33. Маскирование прерываний
Состояние 1 в данном разряде регистра
маски (РгМ) разрешает, а состояние 0 запрещает (маскирует) прерывание текущей программы от соответствующего запроса в регистре запросов прерываний (РгЗП). Таким образом, программа, изменяя маску в регистре маски, может устанавливать произвольные приоритетные соотношения между про- граммами без перекоммутации линий, по которым поступают запросы прерывания. Каждая прерывающая программа может установить свою маску. При формировании маски 1 устанавливаются в разряды, соответ- ствующие запросам (прерывающим программам) с более высоким, чем у данной программы, приоритетом. Схемы И выделяют поступившие незамаскированные запросы прерывания, из которых специальная схема выделяет наиболее приоритетный запрос, формирует код его номера и вырабатывает основной сигнал прерывания (INTR).
С замаскированным запросом, в зависимости от причины прерыва- ния, поступают двояким образом: или он игнорируется, или запомина- ется, с тем, чтобы осуществить затребованные действия, когда запрет будет снят. Например, если прерывание вызвано окончанием операции в ПУ, то его следует, как правило, запомнить, так как иначе ЭВМ оста- нется неосведомленной о том, что ПУ освободилось.
Возможность прерывания программ – важное архитектурное свой- ство ЭВМ, позволяющее эффективно использовать производительность процессора при наличии нескольких процессов, протекающих парал- лельно во времени, требующих в произвольные моменты времени управ- ления и обслуживания со стороны процессора.
Чтобы ЭВМ могла, не требуя больших усилий от программиста, реализовывать с высоким быстродействием прерывания программ, ма- шине необходимо придать соответствующие аппаратурные и программ- ные средства, совокупность которых получила название системы пре- рывания программ. В качестве аппаратных средств используется кон- троллер
прерывания (блок прерывания).
Основными функциями системы прерывания являются:
-
запоминание состояния прерываемой программы и осуществление перехода к прерывающей программе; -
восстановление состояния прерванной программы и возврат к ней.
При наличии нескольких источников запросов прерывания между ними должны быть установлены приоритетные соотношения, опреде- ляющие, какой из нескольких поступивших запросов подлежит обра- ботке в первую очередь, и устанавливающие: имеет право или нет
данный запрос (прерывающая программа) прерывать ту или иную про- грамму.
Структура аппаратных средств системы прерывания
В процессе эволюции компьютеров на базе Intel, эволюционирова- ла и архитектура обработки прерываний. Изначально контроллер пре- рываний PIC (Programmable Interrupt Controller) состоял из одной микросхемы Intel 8259 c 8-ю входными линиями от устройств и двумя выходными сигнальными линиями к процессору — INT и NMI. Кроме того контроллер прерываний связан с процессором через шину. Кон- троллер вызывает внимание процессора выставлением сигнала INT или NMI, а номер возникшего прерывания передает через шину. Кроме того, через шину процессор может осуществлять управление контроллером. На физическом уровне различают даже несколько шин, через которые связаны контроллер с процессором.
Восемь входных линий контроллера прерываний позволяли назна- чать устройствам 8 разных аппаратных прерываний. Позже этого оказа- лось не достаточно. Чтобы расширить количество входных линий в IRQ два одинаковых контроллера связали каскадно. Выходная сигнальная линия дополнительного контроллера завязывалась на входную линию главного контроллера с номером 2. Таким образом, для устройств в та- кой совместной схеме осталось 15
входных линий.
С появлением многоядерных систем потребовались дополнитель- ные контроллеры прерываний. Интелу потребовалось решать две зада- чи. Во-первых, снова появилась нехватка входных линий прерываний. Во-вторых, потребовался механизм межпроцессорной синхронизации в многопроцессорных системах. На смену PIC, Intel разработал APIC.
APIC (Advanced Programmable Interrupt Controller) — улуч- шенный программируемый контроллер прерываний.
Преимущества расширенного контроллера прерываний:
-
возможность реализации межпроцессорных прерываний — сигналов от одного процессора другому; -
поддержка до 256 входов IRQ, в отличие от 1 5 в классической архи- тектуре; -
крайне быстрый доступ к регистрам текущего приоритета прерыва- ния и подтверждения прерывания.
APIC поддерживался в ОС Windows, начиная с Windows NT 4.0. APIC состоит из двух модулей:
-
LOCAL APIC — располагается в ядре процессора, если система мно- гоядерна - в каждом ядре; -
I/O APIC — контроллер, расположенный на системной плате, обыч- но как часть микросхем обрамления.
На примере структуры соединения контроллеров прерывания (рис. 2.34) внутрь каждого ядра процессора поместили контроллер с именем Local APIC, а в дополнение к 2-м контроллерам 8259, добавили IOAPIC. Появилась дополнительная шина APIC, связывающая между собой IOAPIC и LocalAPIC. Появились линии синхронизации процессоров.
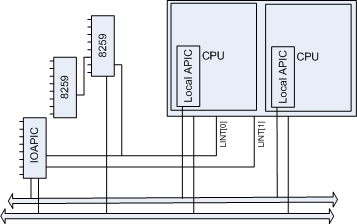 Шина APIС
Шина APIСШина синхронизации
Рис. 2.34. Пример структуры соединия контроллеров прерывания
В настоящий момент наблюдается тенденция к отказу от IO APIC, как и проводников IRQ, и переходу на Message Signaled Interrupts.