Добавлен: 26.10.2023
Просмотров: 39
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
 Министeрство обрaзовaния и нaуки Российской Фeдeрaции
Министeрство обрaзовaния и нaуки Российской ФeдeрaцииМинистeрство высшeго и срeднeго спeциaльного обрaзовaния Рeспублики Узбeкистaн
Филиaл госудaрствeнного бюджeтного обрaзовaтeльного учрeждeния высшeго обрaзовaния
«РОССИЙСКИЙ ГОСУДAРСТВEННЫЙ УНИВEРСИТEТ НEФТИ И ГAЗA
(НAЦИОНAЛЬНЫЙ ИССЛEДОВAТEЛЬСКИЙ УНИВEРСИТEТ) ИМEНИ И.М. ГУБКИНA»
(РГУ НEФТИ И ГAЗA (НИУ) ИМEНИ И.М. ГУБКИНA) В Г.ТAШКEНТE
ОТДEЛEНИE "ТEХНОЛОГИИ ГEОЛОГИЧEСКОЙ И ГEОФИЗИЧEСКОЙ РAЗВEДКИ"
Итоговый отчет по лабораторным работам
по курсу: " Моделирование скважинных геофизических информационных систем"
Выполнила: Иргашева О.И.
студeнт 3-го курсa гр. УГИ -19-01
Принял: Пономаренко О.М.
Ташкент – 2022
Термометр. Измерение инерционности
Цель работы. Познакомиться с типовой конструкцией датчика температуры, влиянием конструкции на инерционность измерителя, обучиться технологии измерения инерционности датчика температуры в единицах времени.
Основные положения. Инерционность термометра определяет его информативность при исследовании быстроизменяющихся входных сигналов. Для скважинного термометра это означат, что, чем меньше инерционность сенсора измерителя, тем с большей скоростью могут быть проведены скважинные исследования, тем больше информации будет получено, тем на меньшее время будет задолжена скважина. На рис. 1.1 показан вариант малоинерционного термодатчика, у которого «заземленный» вывод полупроводникового сенсора припаян непосредственно к защитному кожуху.
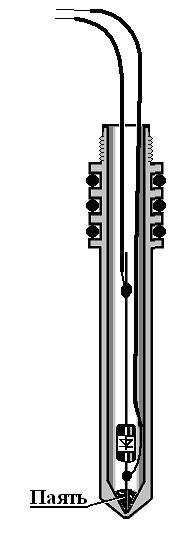
Рисунок 1.1 – Конструкция датчика термометра Т8–КС
Уменьшение инерционности термометра достигается за счет уменьшения теплового сопротивления канала, по которому тепловой поток доходит от измеряемой среды к сенсору. Например, у малоинерционого фольгового скважинного датчика тепло от металлического защитного кожуха проходит на сенсор сквозь тонкий слой теплопроводящего изолятора, обеспечивая его быстрый прогрев.
Принято определять инерционность датчика термометра помещением его из воздуха в подвижную водную среду с другой температурой. В данной работе в качестве рабочей емкости используется лабораторный стакан, наполненный водой, температура которой на 5…10 градусов отличается от температуры датчика термометра.
Формула изменения температуры датчика при его переходе в среду с другой температурой – экспоненциальная:
С(t) = CO + (СВ –CO)∙ (1- exp(-t/
или:
С(t) = CO + (CO – СВ)∙exp(-t/
Где С(t) – текущее значение температуры;
CO – значение комнатной температуры;
СВ –температуры воды;
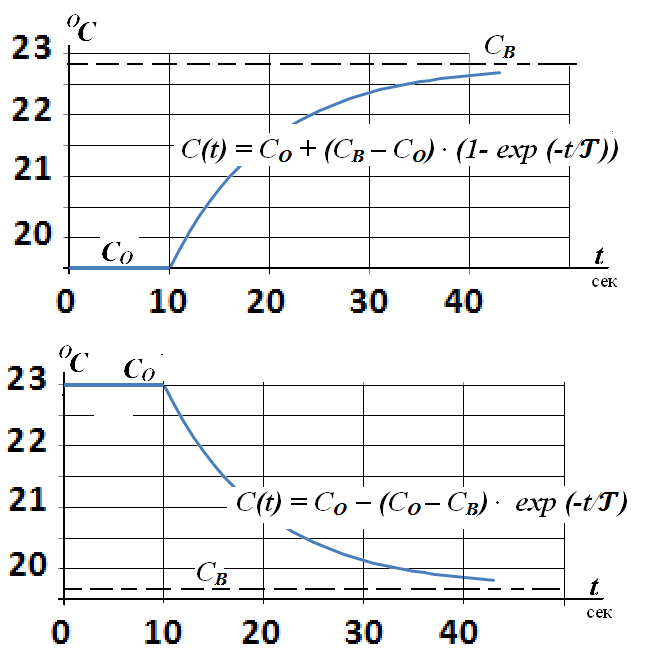
Рисунок 1.2 – Термограммы переходного процесса.
Формат выходных данных. 1 канал – время (сек), 2…9 каналы – термограммы 1…8.
Задание:
-
Наполнили лабораторный стакан водой с температурой выше комнатной. Подключили восьмиканальный датчик температуры к разъему USB регистратора. Запустили программу регистрации, включили режим регистрации. -
Через 10 секунд быстро опустили термометр в воду и в течение 60 секунд «помешивал» её. -
Нагрели в руках датчик термометра и повторили испытания по пп.1 и 2 в воде с холодной температурой. -
Выключили регистрацию. Экспортировали файлы в Excel, построили диаграммы. Определил временные границы графиков, где изменения термограмм проходят по экспоненте.
Полученные данные:
Рисунок 1.3 – Термограммы переходного процесса
Определили примерные значения температуры воды CВ в единицах АЦП.
-
С учетом рис. 1.2 рассчитали и построили диаграмму изменения значений параметра ln(CВ – С(t)) (из формулы 1.1) или соответственно ln(С(t) –CВ) (из формулы 1.2) в зависимости от времени.
Для каждого испытания построили линию тренда, вывел на график формулу линии тренда (y = ax + b) и величину достоверности R2. Изменяя значение
CВ, добились максимального значения достоверности R2. Рассчитали величины инерционности
-
Рассчитали значение инерционности графически.
графически.
Для этого:
-
примерно оценили температуру воды CВ; -
провели на графике константу CO +(CВ–CО)∙0,63 или, соответственно
CO- (CО–CВ)∙0,37 (1.4)
-
из точки пересечения константы и графика С(t) опустили перпендикуляр на ось t, и рассчитали величину инерционности датчика, равную временному интервалу между моментом пересечения оси перпендикуляром и моментом начала экспоненты на графике.
Рисунок 1.4 – Графики изменения параметра C(t)
Вывод: при проведении данной лабораторной работы мы ознакомились с типовой конструкцией датчика температуры, научились технологии измерения инерционности датчика температуры в единицах времени. Инерционность датчика температуры была определена графически и аналитически. Исходя из графика видно, что, для того что – бы датчик температуры при движении в воде, измерил максимально близкое к истинному значению температуры, понадобиться порядка 37-40 секунд.
Локатор муфт
Цель работы. Познакомиться с конструкцией модуля локатора муфт ЛМ, принципами его работы.
Основные положения. Основная функция скважинного локатора муфт – контроль и регистрация изменений магнитных характеристик прилегающих к прибору элементов конструкции скважины: муфтовых соединений и перфорационных отверстий.
Рассмотрим конструкцию и работу локатора муфт.
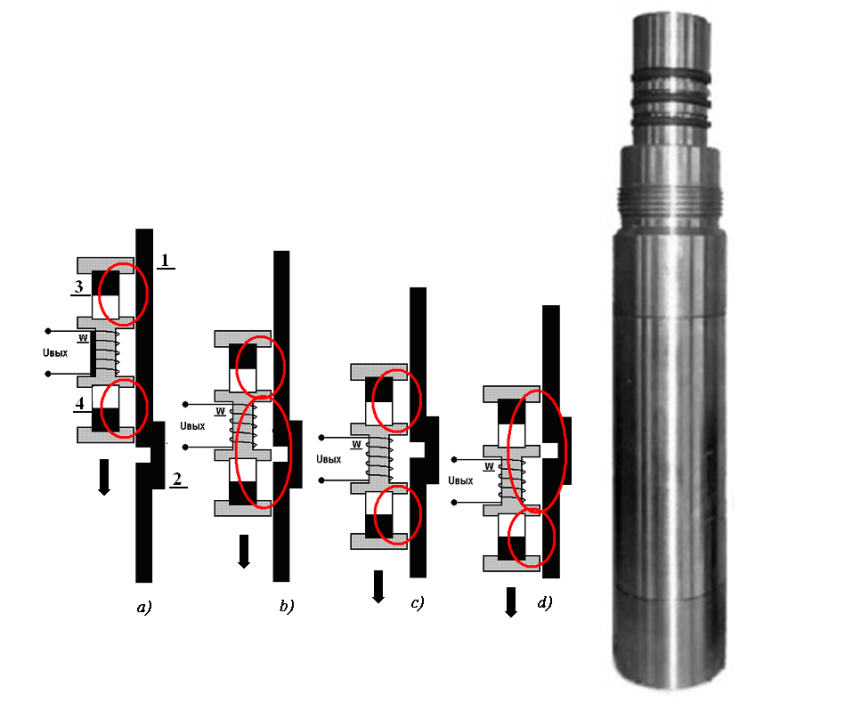
Рисунок 2.1 – Внешний вид и принцип работы магнитного локатора муфт на постоянных магнитах.
В приборе, упираясь в крайние железные башмаки, встречно стоят магниты 3 и 4, между ними установлен индуктивный датчик: катушка W, намотанная на железном сердечнике, имеющем выступающие щечки (рис. 2.1). Когда прибор движется по стенке трубы 1, то разрыва цепи магнитопровода нет, и магнитные линии замыкаются в противоположных частях магнитной системы. При этом в катушке магнитного поля нет.
Когда первая щечка катушки проходит мимо зазора труб в муфтовом соединении 2, в этом месте создается разрыв магнитной цепи нижнего магнитопровода, и магнитные линии перераспределяются на другую щечку. Затем щечка катушки выходит из зазора, и магнитные линии возвращаются на прежнее место (рис. 2.1). Изменение магнитного поля dF формирует в катушке W электрический сигнал UВЫХ, пропорциональный скорости этого изменения UВЫХ= – dF/dt (рис. 2.2, диаграмма 1).
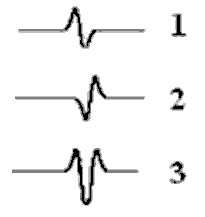
Рисунок 2.2 – Формирование сигнала датчиком ЛМ на муфтовом соединении
Когда вторая щечка проходит мимо зазора, процесс зеркально повторяется, создавая сигнал 2. Суммируясь, сигналы 1 и 2 формируют узнаваемую двугорбую диаграмму 3.
Амплитуда сигнала локатора муфт пропорциональна числу витков катушки, мощности магнитов, скорости движения прибора и зазору между трубами в муфте.
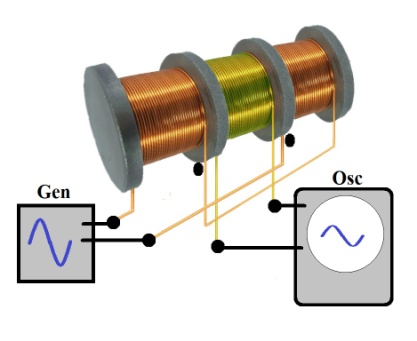
Рисунок 2.3 – Внешний вид и принцип работы сенсора магнитного локатора муфт на переменном токе
Принцип работы локатора муфт на переменном токе ЛПМ практически такой же. Отличие состоит в том, что вместо постоянных магнитов установлены электромагниты на переменном токе, которые формируют информационный сигнал не только в движении локатора, но и при его остановке (рис.2.3).
Форма сигнала, регистрируемого в зоне перфорации, зависит от диаметра отверстий, их расположения относительно локатора муфт и чистоты краев прострелянных дырок.
В лабораторной работе изменения магнитного поля внутри катушки формируется обратным процессом: не уменьшением проводимости магнитной цепи, а ее локальным увеличением.
Формат выходных данных. Время (сек) передается в первом канале телесистемы, показания локатора муфт – во втором канале.
Задание:
-
Подключили лабораторный локатор муфт ЛМ к разъему USB регистратора. Запустили программу регистрации, включили режим регистрации. -
Зарегистрировали диаграммы ЛМ, по 2 раза перемещая стальную пластину вдоль по локатору муфт, прижимая ее плоской стороной к прибору. Вначале со скоростью 4 см/с, затем – со скоростью 15 см/с (рис. 2.4). Нашли местоположение катушки и остановил пластину над ней.
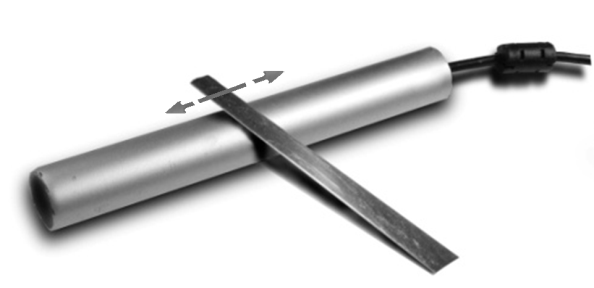
Рисунок 2.4 – Внешний вид локатора муфт на переменном токе
-
Повторили п.2, перемещая пластину над локатором муфт на высоте 5 мм, положив на локатор муфт тетрадь соответствующей толщины. -
Выключили регистрацию. Сформировали по две диаграммы испытаний по п.2 и п.3, удалив из них неинформативные участки. Объяснили поведение кривых. -
Повторили пп.1…4 для ЛПМ-КС. Сравнили характеристики локаторов.
Полученные данные:
Рисунок 2.5 – График зависимости Uвых от t
Рисунок 2.6 – График зависимости Uвых от t с 5 мм
Рисунок 2.7 – График зависимости Uвых от t (переменный)
Вывод: при выполнении данной лабораторной работы, нами были изучены информационные свойства локатора муфт. В данной работе мы построили 6 диаграмм. Скорости перемещения пластины вдоль оси прибора соответственно 4 и 15 см/с.
1) На рисунке 2.5 видно, что формирование электрического сигнала пропорционально скорости движения пластины, так как изменение магнитного поля происходит быстрее.
2) На рисунке 2.6. видно, что при наличии препятствия (локатор муфт находиться на расстоянии 5 мм от пластины), амплитуда сигнала UВЫХ , снижается.
3) Для переменного локатора муфт выводы аналогичны пункту 1, то есть явно прослеживается, что формирование электрического сигнала пропорционально скорости движения пластины.
Канал влагомера
Цель работы. Познакомить студентов с возможностями диэлькометрического влагомера.
Основные положения. Принцип работы диэлькометрического влагомера основан на измерении емкости измерительного конденсатора.
Типовая конструкция скважинного датчика влагомера цилиндрического типа показана на рис. 3.1. Центральный электрод конденсатора 1 электрически изолирован от корпуса 3 (второй электрод) диэлектриком 2.
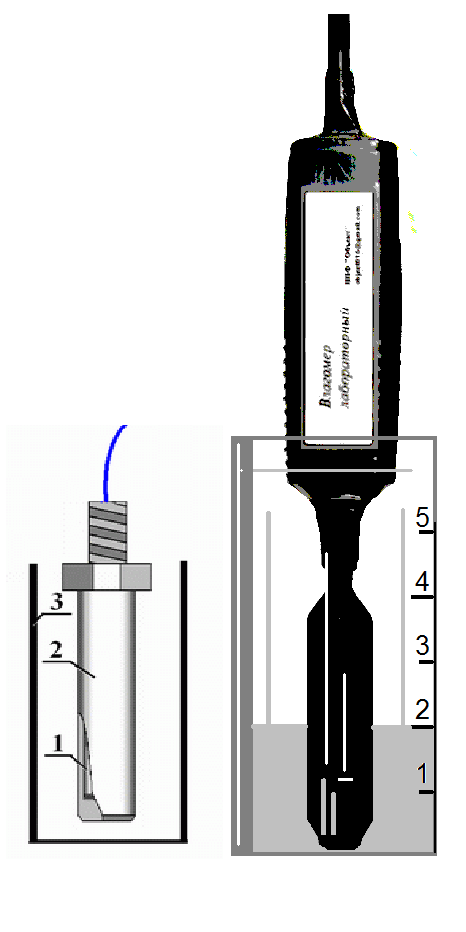
Рисунок 3.3 – Конструкция цилиндрического сенсора скважинного влагомера и внешний вид лабораторного влагомера ВЛ–КС.