Файл: Техническое задание Введение Типы антенн Описание облучающей системы Специальная часть.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.10.2023
Просмотров: 105
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
, динамических (сил инерции) Мдин, весовых (от массовых нагрузок) Мвес, аэродинамических (от ветровых нагрузок) Маэр;
Моменты приводятся к выходному n-валу, на котором установлен РО:
Мро = Мст + Мдин + Мвес + Маэр
Статический момент Мст учитывается через коэффициент потерь на трение в опорах одного вала серводвигателя П=0,002 для опор качения. Задаваясь кинематической схемой и числом валом n=1, вращающийся момент преобразуется в формулу 2:
Мро = (2) [1]
(2) [1]
Подсчитаем моменты от каждой нагрузки по отдельности:
-Аэродинамический момент
Маэр = 0, так как привод находится под РПУ
-Динамический момент вычисляется по формуле:
Мдин = J*ε
J – момент инерции облучателя
J = 1 [кг*м2]
ε - угловое ускорение (см. ТЗ)
ε=14,22 [рад/с2]
Мдин = 1 кг*м2 * 14,22 рад/с2 = 14,22 [Н*м]
-Весовой момент вычисляется по формуле:
Мвес = m*g*R
m = 10 кг
R = 0 м
Так как РО расположен на оси вращения ОПУ, R = 0
Мро = = 14,28 [Н*м]
= 14,28 [Н*м]
Потребная мощность по формуле (1):
Wpo = 14,28 * 0,21 = 3 [Вт]
Исходя из расчетов, я выбрал электродвигатель компании Maxon EC40 (рис. 7)
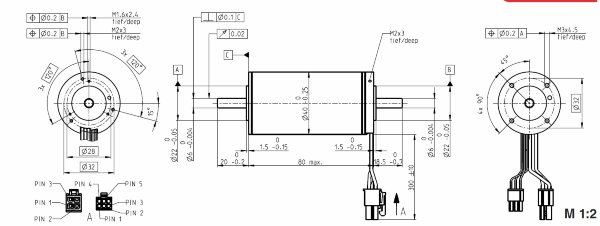

Рис. 7
Характеристики двигателя:
Редуктор выбрал планетарный компании Maxon GP42C ввиду его компактности, небольшого веса и способности выдавать большие передаточные числа (Рис.8)

Рис. 8
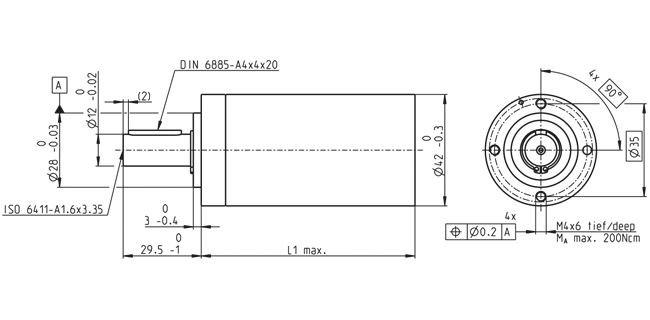
Редуктор имеет следующие характеристики:
Редукция i = 1 : 756
М (выходной момент) = 3-15 H*м
4.2.2. Кинематический расчет
Общее передаточное число вычисляется по формуле:

iмех = 3110 / 100 = 31
nро =100 об/мин [из ТЗ]
4.2.3. Силовой расчет
Вращающий момент на входном валу двигателя (M1 = Твх)
 Н*м
Н*м
Вращающий момент на выходном валу (M2 = Твых)
 = 3*31*0,97 = 46,5 Н*м
= 3*31*0,97 = 46,5 Н*м
4.2.4. Проектировочный расчет вала (поз. 4, раздел 4.2.1)
В современных машинах наиболее широко используется вращательное движение деталей. Менее распространено поступательное движение и его комбинация с вращательным (винтовое движение). Движение поступательно перемещающихся частей машин обеспечивается специальными устройствами, называемыми направляющими. Для осуществления вращательного движения используют специальные детали – валы и оси, которые своими специально приспособленными для этого участками – цапфами (шипами) или пятами – опираются на опорные устройства, называемые подшипниками или подпятниками.
Валом называют деталь (как правило, гладкой или ступенчатой цилиндрической формы), предназначенную для поддержания установленных на ней шкивов, зубчатых колес, звездочек, катков и т. д., и для передачи вращающего момента.
При работе вал испытывает изгиб и кручение, а в отдельных случаях помимо изгиба и кручения валы могут испытывать деформацию растяжения (сжатия).
Некоторые валы не поддерживают вращающиеся детали и работают только на кручение (карданные валы автомобилей, валки прокатных станков и др.).
Вал (рис. 9) 1 имеет опоры 2, называемые подшипниками. Часть вала, охватываемую опорой, называют цапфой. Концевые цапфы именуют шипами 3, а промежуточные — шейками 4.
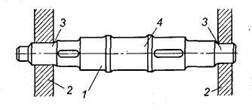
Рис. 9
Прямой вал: 1 — вал; 2 — опоры вала; 3 — цапфы; 4 — шейка
Расчет вала:
Материал – Сталь 40Х, σ-1 = 495 Мпа
Расчет минимальных диаметров валов:
dвх
K
 = 3,1
= 3,1 8 мм
8 мм
dвых K
K  = 3,1
= 3,1
 15 мм [3]
15 мм [3]
Согласно ГОСТ 12080-66 получаем:
dвх = 8 мм
dвых =15 мм
Размеры шпоночного соединения: b = 5 мм, h = 5 мм
Fсм = =
=  = 3875 Н
= 3875 Н
σсм =
 0,4 σ-1 = 332 МПа => lp
0,4 σ-1 = 332 МПа => lp  4,6 мм [3]
4,6 мм [3]
lp = 16 мм.
Длины участков вала:
L1 = 40 мм, L2 = L1 + 40 мм = 80 мм, L3 = L1 = 40 мм.
Для этого вала выбираю 8ой квалитет, так как мне необходимо обеспечить точную сборку детали, плавность хода и механическую прочность детали.
На основании квалитета и диаметра вала (по ГОСТу 25347-82) выбираю шероховатость Ra=2,5 [7].
4.2.5. Прочностной расчет вала
Построение эпюр для вала выходного, силы от колеса:
Ft = = 633 Н – окружная сила
= 633 Н – окружная сила
Fr = Ft * tgα = 633 0,364 = 230 Н – радиальная сила [3]
0,364 = 230 Н – радиальная сила [3]
Определим реакции опор:
В плоскости OYZ:
-Fr*40 + Rby*120 =0
Rby=104,5 H
Fr*40-Ray*120 = 0
Ray=125,5 H
В плоскости XOZ:
Rbx*120-Ft*40 = 0
Rbx=287,7 H
-Rax*120+Ft*40 = 0
Rax= 345,3 H
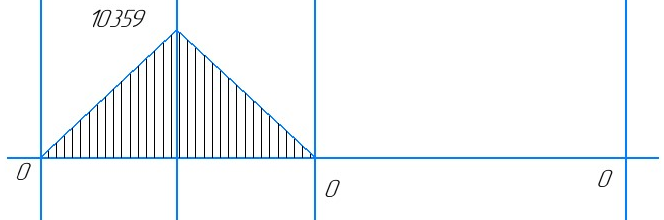
Изгибающий момент в плоскости XOZ, сечение B: Mxb = 0
сечение С: Mxc = Rax*40 = 10359 Н*мм.
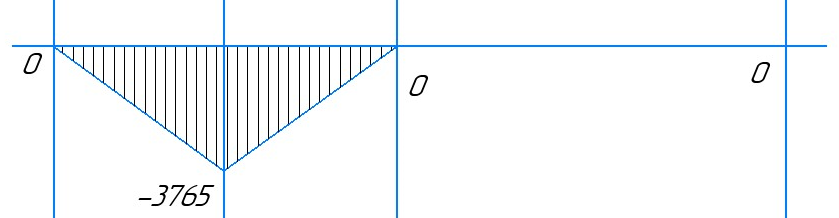
Изгибающий момент в плоскости YOZ,
сечение В: Myb = 0
сечение С: Myc = -Ray*40 = - 3765 H*мм.
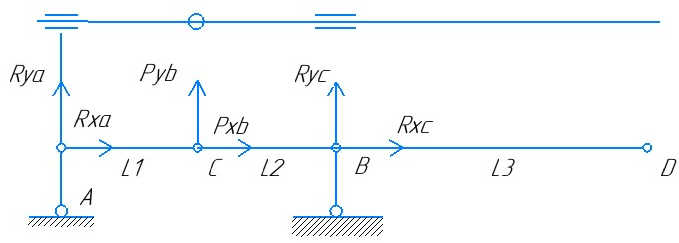
Расчетная схема вала для построения эпюр:
Эпюра Мх:
Эпюра Мy:
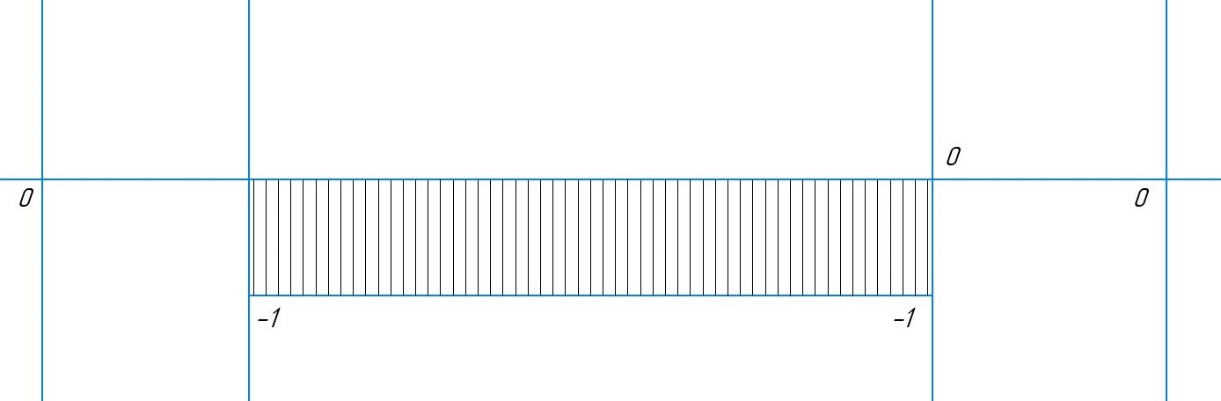
Эпюра N (осевые факторы):
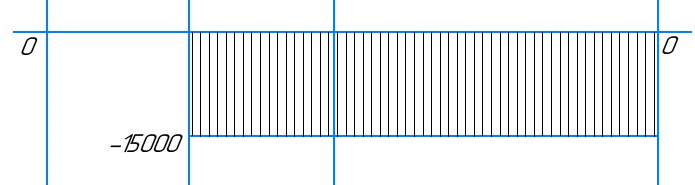
Эпюра Мкр:
Опасным местом является место зубчатого зацепления.
Коэффициент перегрузки Кп = 2.4 (см.4.2.1)
Мх = 10359 Н*мм;
Му = -3765 Н*мм;
F = 1 H;
Мкр = -15000 Н*м;
Mmax = = 11021 H*мм;
= 11021 H*мм;
Fmax = Кп * F = 2,4 * 1 = 2,4 H;
W = 0.1*d3 = 337,5 мм3
А = 176,6 мм2
Диаметр в сечении d = 15 мм
σ =103*Mmax/W+Fmax/A = 24 МПа ≤ [σ] = 490 МПа, значит условия прочности выполняются.
По итогам расчета мной самостоятельно был выпущен чертеж КМУ.000000.002 (см. 10. Приложение).
4.2.6. Проектировочный расчет зубчатого колеса и шестерни (поз.3, раздел 4.2.1.)
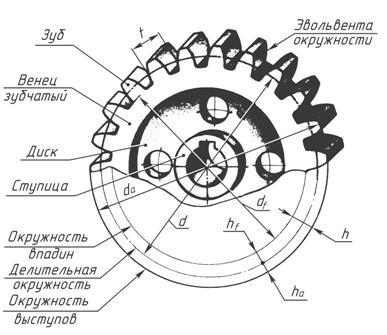
В современных технологиях используются десятки видов различных механических передач, которые предназначены для передачи крутящегося момента от одного вала к другому. Так же есть виды передач, которые преобразуют поступательные движения во вращательные. В этих передачах используются различные виды шестерней, конические шестерни, цилиндрические и другие. Технологически все шестерни имеют основание с круговым (или продольным) зубчатым радиусом. Передача крутящегося момента происходит в результате зацепления зубьями двух (или более) шестерней. Практически все виды шестерней относятся к тому или иному виду:
Прямозубые шестерни (рис. 10) используются наиболее часто и являются одними из первых придуманных зубчатых колёс. Прообразы прямозубых шестерней появились тысячи лет назад. Сейчас прямозубые шестерни изготавливают из различных материалов, металла, пластика, а также изготавливают композитные детали используя сочетания разных металлов и пластика. Прямозубые шестерни позволяют передать поступательный момент только на валы, находящиеся в одной плоскости (параллельные).
Рис. 10
Расчет колеса и шестерни:
Межосевое расстояние в первом приближении:
аω ≥ 3,1 * [2]
[2]
аω ≥ 82 мм
Число зубьев:
Zш = 7
Zк = 42
Модуль зуба:
аω = => m =
=> m =  = 3,337 мм
= 3,337 мм
По ГОСТ 9563-60 берем модуль:
m = 3,5 мм
Делительные диаметры:
dш = m*Zш = 24,5 мм
dк = m*Zк = 147 мм [2]
Межосевое расстояние:
аω = = 82 мм
= 82 мм
Размеры зубьев:
h = 2,25*m = 7,875 мм, ha = 3,5 мм, hf = 4,375 мм
Ширина зубчатого венца колеса и шестерни:
bω = 0,2 * aω = 16,4 мм => bk = 11,5 мм, bш = 16,5 мм
Для отверстия зубчатого колеса выбираю 9ый квалитет, чуть ниже, чем для вала, так как мне необходимо обеспечить точную сборку детали, плавность хода и механическую прочность детали. На основании квалитета и диаметра отверстия выбираю шероховатость Ra=2,5 [7].
4.2.7. Прочностной расчет колеса
σH ≤ σHP [6]
где σHP – допускаемое контактное напряжение, МПа.
Допускаемое контактное напряжение σHP
Моменты приводятся к выходному n-валу, на котором установлен РО:
Мро = Мст + Мдин + Мвес + Маэр
Статический момент Мст учитывается через коэффициент потерь на трение в опорах одного вала серводвигателя П=0,002 для опор качения. Задаваясь кинематической схемой и числом валом n=1, вращающийся момент преобразуется в формулу 2:
Мро =
(2) [1]Подсчитаем моменты от каждой нагрузки по отдельности:
-Аэродинамический момент
Маэр = 0, так как привод находится под РПУ
-Динамический момент вычисляется по формуле:
Мдин = J*ε
J – момент инерции облучателя
J = 1 [кг*м2]
ε - угловое ускорение (см. ТЗ)
ε=14,22 [рад/с2]
Мдин = 1 кг*м2 * 14,22 рад/с2 = 14,22 [Н*м]
-Весовой момент вычисляется по формуле:
Мвес = m*g*R
m = 10 кг
R = 0 м
Так как РО расположен на оси вращения ОПУ, R = 0
Мро =
= 14,28 [Н*м]Потребная мощность по формуле (1):
Wpo = 14,28 * 0,21 = 3 [Вт]
Исходя из расчетов, я выбрал электродвигатель компании Maxon EC40 (рис. 7)
Рис. 7
Характеристики двигателя:
| Wдв (Вт) | nдв (об/мин) | Мном (мН*м) | V (В) | Kп |
| 96 | 3110 | 161 | 24 | 2.4 |
Редуктор выбрал планетарный компании Maxon GP42C ввиду его компактности, небольшого веса и способности выдавать большие передаточные числа (Рис.8)
Рис. 8
Редуктор имеет следующие характеристики:
Редукция i = 1 : 756
М (выходной момент) = 3-15 H*м
4.2.2. Кинематический расчет
Общее передаточное число вычисляется по формуле:
iмех = 3110 / 100 = 31
nро =100 об/мин [из ТЗ]
4.2.3. Силовой расчет
Вращающий момент на входном валу двигателя (M1 = Твх)
Н*мВращающий момент на выходном валу (M2 = Твых)
= 3*31*0,97 = 46,5 Н*м4.2.4. Проектировочный расчет вала (поз. 4, раздел 4.2.1)
В современных машинах наиболее широко используется вращательное движение деталей. Менее распространено поступательное движение и его комбинация с вращательным (винтовое движение). Движение поступательно перемещающихся частей машин обеспечивается специальными устройствами, называемыми направляющими. Для осуществления вращательного движения используют специальные детали – валы и оси, которые своими специально приспособленными для этого участками – цапфами (шипами) или пятами – опираются на опорные устройства, называемые подшипниками или подпятниками.
Валом называют деталь (как правило, гладкой или ступенчатой цилиндрической формы), предназначенную для поддержания установленных на ней шкивов, зубчатых колес, звездочек, катков и т. д., и для передачи вращающего момента.
При работе вал испытывает изгиб и кручение, а в отдельных случаях помимо изгиба и кручения валы могут испытывать деформацию растяжения (сжатия).
Некоторые валы не поддерживают вращающиеся детали и работают только на кручение (карданные валы автомобилей, валки прокатных станков и др.).
Вал (рис. 9) 1 имеет опоры 2, называемые подшипниками. Часть вала, охватываемую опорой, называют цапфой. Концевые цапфы именуют шипами 3, а промежуточные — шейками 4.
Рис. 9
Прямой вал: 1 — вал; 2 — опоры вала; 3 — цапфы; 4 — шейка
Расчет вала:
Материал – Сталь 40Х, σ-1 = 495 Мпа
Расчет минимальных диаметров валов:
dвх
K
= 3,1 8 ммdвых
K = 3,1 15 мм [3]Согласно ГОСТ 12080-66 получаем:
dвх = 8 мм
dвых =15 мм
Размеры шпоночного соединения: b = 5 мм, h = 5 мм
Fсм =
= = 3875 Нσсм =
0,4 σ-1 = 332 МПа => lp 4,6 мм [3]lp = 16 мм.
Длины участков вала:
L1 = 40 мм, L2 = L1 + 40 мм = 80 мм, L3 = L1 = 40 мм.
Для этого вала выбираю 8ой квалитет, так как мне необходимо обеспечить точную сборку детали, плавность хода и механическую прочность детали.
На основании квалитета и диаметра вала (по ГОСТу 25347-82) выбираю шероховатость Ra=2,5 [7].
4.2.5. Прочностной расчет вала
Построение эпюр для вала выходного, силы от колеса:
Ft =
= 633 Н – окружная силаFr = Ft * tgα = 633
0,364 = 230 Н – радиальная сила [3]Определим реакции опор:
В плоскости OYZ:
-Fr*40 + Rby*120 =0
Rby=104,5 H
Fr*40-Ray*120 = 0
Ray=125,5 H
В плоскости XOZ:
Rbx*120-Ft*40 = 0
Rbx=287,7 H
-Rax*120+Ft*40 = 0
Rax= 345,3 H
Изгибающий момент в плоскости XOZ, сечение B: Mxb = 0
сечение С: Mxc = Rax*40 = 10359 Н*мм.
Изгибающий момент в плоскости YOZ,
сечение В: Myb = 0
сечение С: Myc = -Ray*40 = - 3765 H*мм.
Расчетная схема вала для построения эпюр:
Эпюра Мх:
Эпюра Мy:
Эпюра N (осевые факторы):
Эпюра Мкр:
Опасным местом является место зубчатого зацепления.
Коэффициент перегрузки Кп = 2.4 (см.4.2.1)
Мх = 10359 Н*мм;
Му = -3765 Н*мм;
F = 1 H;
Мкр = -15000 Н*м;
Mmax =
= 11021 H*мм;Fmax = Кп * F = 2,4 * 1 = 2,4 H;
W = 0.1*d3 = 337,5 мм3
А = 176,6 мм2
Диаметр в сечении d = 15 мм
σ =103*Mmax/W+Fmax/A = 24 МПа ≤ [σ] = 490 МПа, значит условия прочности выполняются.
По итогам расчета мной самостоятельно был выпущен чертеж КМУ.000000.002 (см. 10. Приложение).
4.2.6. Проектировочный расчет зубчатого колеса и шестерни (поз.3, раздел 4.2.1.)
В современных технологиях используются десятки видов различных механических передач, которые предназначены для передачи крутящегося момента от одного вала к другому. Так же есть виды передач, которые преобразуют поступательные движения во вращательные. В этих передачах используются различные виды шестерней, конические шестерни, цилиндрические и другие. Технологически все шестерни имеют основание с круговым (или продольным) зубчатым радиусом. Передача крутящегося момента происходит в результате зацепления зубьями двух (или более) шестерней. Практически все виды шестерней относятся к тому или иному виду:
-
Прямозубые шестерни; -
Косозубые шестерни; -
Шестерни с внутренним зацеплением; -
Винтовые шестерни; -
Секторные шестерни; -
Шестерни с круговыми зубьями; -
Конические шестерни; -
Зубчатые рейки; -
Шестерня-звезда.
Прямозубые шестерни (рис. 10) используются наиболее часто и являются одними из первых придуманных зубчатых колёс. Прообразы прямозубых шестерней появились тысячи лет назад. Сейчас прямозубые шестерни изготавливают из различных материалов, металла, пластика, а также изготавливают композитные детали используя сочетания разных металлов и пластика. Прямозубые шестерни позволяют передать поступательный момент только на валы, находящиеся в одной плоскости (параллельные).
Рис. 10
Расчет колеса и шестерни:
Межосевое расстояние в первом приближении:
аω ≥ 3,1 *
[2]аω ≥ 82 мм
Число зубьев:
Zш = 7
Zк = 42
Модуль зуба:
аω =
=> m = = 3,337 ммПо ГОСТ 9563-60 берем модуль:
m = 3,5 мм
Делительные диаметры:
dш = m*Zш = 24,5 мм
dк = m*Zк = 147 мм [2]
Межосевое расстояние:
аω =
= 82 ммРазмеры зубьев:
h = 2,25*m = 7,875 мм, ha = 3,5 мм, hf = 4,375 мм
Ширина зубчатого венца колеса и шестерни:
bω = 0,2 * aω = 16,4 мм => bk = 11,5 мм, bш = 16,5 мм
Для отверстия зубчатого колеса выбираю 9ый квалитет, чуть ниже, чем для вала, так как мне необходимо обеспечить точную сборку детали, плавность хода и механическую прочность детали. На основании квалитета и диаметра отверстия выбираю шероховатость Ra=2,5 [7].
4.2.7. Прочностной расчет колеса
σH ≤ σHP [6]
где σHP – допускаемое контактное напряжение, МПа.
Допускаемое контактное напряжение σHP