Файл: Содержание Введение Определение пространственной ориентации объектов.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 67
Скачиваний: 2
СОДЕРЖАНИЕ
1. Определение пространственной ориентации объектов
1.1 Параметры пространственной ориентации
1.2 Методы определения пространственной ориентации вектора-базы
2. Разработка и исследование алгоритма
2.1 Общий алгоритм динамического метода решения угловой задачи
2.2 Динамический метод, использующий движение объекта
2.4 Моделирование алгоритма в MathCad
3 Экономическое обоснование работы
3.1 Экономический эффект от внедрения системы ГЛОНАСС
3.2 Определение показателей экономического обоснования проектируемого изделия
3.2.1 Затраты на проектирование и опытное производство проектируемого приемоиндикатора
3.2.2 Себестоимость проектируемой техники в серийном производстве
3.2.3 Годовые эксплуатационные расходы
3.3 Отпускная цена и экономическая эффективность проектируемого блока, имеющего аналог
4. Безопасность жизнедеятельности
Классификация помещений по степени опасности поражения электрическим током представлена в таблице _.
Класс помещения | Характеристика помещения |
Без повышенной опасности | Сухое, нежаркое, с токонепроводящим полом, без токопроводящей пыли, отсутствует возможность одновременного прикосновения человека к имеющим соединение с землей металлоконструкциям зданий, технологическим аппаратам, механизмам и т.п. с одной стороны, и кметаллическим корпусам электрооборудования, которые при пробое изоляции могут оказаться под напряжением, с другой _ _ |
С повышенной опасностью | 1 Имеется наличие одного из условий:а) сырости (относительная. влажность В>75%);6) токопроводящей пыли;в) токопроводяшего пола;г) высокой температуры (жаркое);д) возможности одновременного прикосновения человекак имеющим соединение с землей металлоконструкциям зданий, технологическим аппаратам и т.п. с одной стороны, и к металлическим корпусам электрооборудования, - с другой |
Особо опасное | Имеется наличие одного из условий:а) особой сырости (В>100 %);б) химически активной или органической среды;в) одновременного наличия двух и более условий повышенной опасности |
Таблица _ – Классификация помещений по степени опасности поражения электрическим током.
Помещение относится к классу помещения с повышенной опасностью поражения человека электрическим током.
Существует возможность одновременного прикосновения пользователя к металлическим конструкциям здания, имеющим соединение с землей с одной стороны, и к металлическим корпусам оборудования, которые могут оказаться под напряжением, - с другой.
Согласно ГОСТ 12.1.030-81 (ССБТ). Электробезопасность. Защитное заземление. Зануление» занулению или защитному заземлению подлежат металлические нетоковедущие части установок, которые из-за повреждения изоляции могут оказаться под напряжением. В помещениях без повышенной опасности поражения человека электрическим током заземлению или занулению подлежат установки с напряжением 380 В и выше переменного и 440 В и выше постоянного тока.
В помещения с повышенной опасностью с напряжением выше 42В переменного тока и 110В постоянного тока
В рассмотренном помещении требуется зануление корпусов ЭВМ.
Сопротивление изоляционного материала осветительной и силовой сети на участках между смежными предохранителями или между проводом и землей, как и между двумя проводами, должно быть не менее 0,5 МОм.
Пожарная безопасность
При работе с электрооборудованием пожар может возникнуть по причине следующих факторов:
короткое замыкание;
большое переходное сопротивление;
искрение;
электрическая дуга;
перегрузка.
Для защиты электрооборудования от токов перегрузки и коротких замыканий применяют такие средства, как: автоматы защиты сети, тепловые реле и плавкие предохранители.
Каждое помещение, в зависимостиот площади, должно быть обеспечено средствами пожаротушения.
Средства пожаротушения:
огнетушители;
ящики с песком и асбестовая ткань;
бочки с водой и пожарные ведра.
Согласно СанПин 12.13130.2009, при тушении пожара на электроустановках, напряжение которых не превышает 400В, оптимально использовать хладоновые огнетушители и тушить с расстояния не менее 5 метров в диэлектрических перчатках.
В помещении площадью 55 м2 должно находиться два огнетушителя (пенный и углекислотный) и асбестовая ткань размером 2х2 м.
Также в помещении должны быть установлены средства обнаружения пожара и система сигнализации о пожаре.
Дымовые пожарные сигнализации в закрытых помещениях положено устанавливать в местах наиболее вероятного возгорания и концентрации дыма.
Для площади помещения 55 м2 с высотой потолков 3 метра будет достаточно одной дымовой пожарной сигнализации.
4.2 Требования к освещению рабочих мест пользователей ПЭВМ. Проектирование и расчет осветительной установки.
Выполняя работу на ЭВМ, в помещениях помимо естественного освещения должно обеспечиваться искусственное.
Естественное освещение — освещение, проникающее внутрь помещения, например, через окна. Используя в темное время суток искусственное освещение, можно компенсировать нехватку естественного освещения.
В зависимости от того, какая степень точности зрительных этапов необходима при выполнении данной работы, такой соответствующий уровень освещения и необходим в помещении. Работа на ЭВМ предполагает то, что исполнитель работы будет заниматься печатанием и чтением символов. Согласно СП 52.13330.2016 такая зрительная работа – средней точности разряда IVа.
В таблице _ приведена минимально допустимая освещенность поверхностей для работы.
Таблица _ – Минимально допустимая освещенность
| Система комбинированного освещения, лк | Система общего освещения, лк |
| 750 | 400 |
Общее освещение необходимо осуществлять светильниками, расположенными в ряд сплошной линией. Лучше всего подходят светильники, которые будут расположены над рабочими зонами, но еще лучше – со смещением в сторону человека.
Светильники, создающие свет, аналогичный дневному, являются самыми лучшими.
Для того, чтобы освещать помещение, был выбран светильник ЛСП 02 с люминесцентными лампами. Характеристики выбранного светильника представлены в таблице _.
Таблица _ – Характеристики выбранного светильника
| Параметр | Значение |
| Источник света | Люминесцентные лампы |
| Тип светильника | ЛСП02 |
| Количество,штимощностьламп,Вт | 2х40 |
| Световойпоток ,лм (ЛДЦ) | 3550 |
| Защитныйугол,град | 15 |
| КПД,% | 75 |
| Размеры,мм | 1240х226х158 |
Количество необходимых светильников рассчитывается по формуле:
 (_)
(_)где ЕМ – нормированная освещенность рабочей поверхности (400 лк);
S – площадь помещения (55 м2);
Kз – коэффициент запаса (1,4);
z – коэффициент неравномерности освещенности (1,1);
n – количество ламп в светильнике (2 шт);
ɳ – коэффициент использования светового потока в долях единицы;
Ф – световой поток лампы (3550 лм).
Индекс помещения i зависит от площади помещения (S) и высоты подвеса светильников над рабочей поверхностью (
 ). Высота подвеса светильников зависит от высоты помещения (h), расстояния светильников до потолка (
). Высота подвеса светильников зависит от высоты помещения (h), расстояния светильников до потолка (
) и высоты рабочей поверхности (
 ).
).Рассчитаем высоту подвеса светильника:

Далее рассчитаем индекс помещения:

После этого определяем необходимое число светильников:
Примем
 .
.ЛСП02 кривая силы света λ=1,4…1,6

Примем λ=1,5, тогда


 м
м
 м
м м
мТ.к. N=8, т.е. 2 ряда по 4 лампы, учитывая размеры ламп, получаем общую длину ламп 1,25
 4=5м. Учитывая расстояние от стен
4=5м. Учитывая расстояние от стен  , получаем 5+1,2
, получаем 5+1,2 =7,4м (т.к.
=7,4м (т.к.  примем усредненное значение
примем усредненное значение  ). Т.к. р≤
). Т.к. р≤ =
= =1 и
=1 и  , делаем вывод, что для достаточного освещения помещения необходимо разместить дополнительные светильники в каждом ряду
, делаем вывод, что для достаточного освещения помещения необходимо разместить дополнительные светильники в каждом рядуТ.к. N=10, т.е. 2 ряда по 5 ламп, учитывая размеры ламп, получаем общую длину ламп 1,25
5=5м. Учитывая расстояние от стен , получаем 6,25+1,2 =8,65м Т.к. р≤ =
=1 и
 , делаем вывод, что 5 ламп в каждом ряду достаточно для полного освещения помещения.
, делаем вывод, что 5 ламп в каждом ряду достаточно для полного освещения помещения.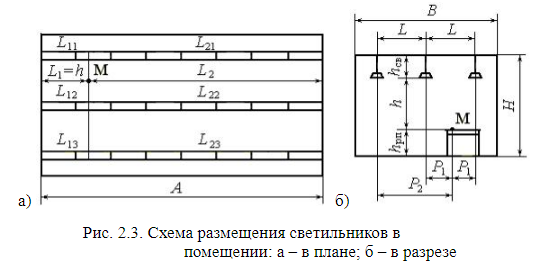
При общем равномерном освещении контрольная точка М выбирается на уровне рабочей поверхности, как правило, посередине между рядами светильников, на расстоянии L1 = h от торцевых стен. Точка М освещается от-
резками рядов светильников длиной L11 = L12 = L13 = L1 и L21 = L22 = L23 = L2. Пользуясь масштабом плана размещения светильников в помещении,
определяем расстояния P1, P2, длину отрезков ряда L1, L2 и рассчитываем отношения:
Pi ' Pi и Li ' Li . h h
Из графика линейных изолюкс светильника ЛОУ 1П (рис. 2.4, в) для точки М с координатами Pi ' и Li ' определяем условную освещенность εi, со-
здаваемую каждым отрезком ряда светильников.
В разделе БЖД рассмотрены вопросы микроклимата, воздухообмена, вибрации и шума, пожарной безопасности, электробезопасности, излучения на рабочем месте, вопросы организации рабочего места, организации труда и отдыха, присутствия в воздухе вредных веществ и пыли, а также была рассчитана осветительная установка. Все вопросы были рассмотрены согласно требованиям нормативных документов.
Заключение
В данной дипломной работе был разработан динамический алгоритм, позволяющий определять с большой точностью угловую ориентацию объекта - потребителя. Вычисления проводились в математической среде MathCad14, входными данными являлось созвездие из 10 навигационных космических аппаратов (НКА), спутниковых радионавигационных систем (CРНС: 2 ГОНАСС, 6 GPS), данный динамический алгоритм определения угловой ориентации вращающегося объекта - потребителя может производить расчет при при минимальном созвездии из 3 НКА. В результате расчетов были получены графики траектории вектора базы объекта - потребителя в топоцентрической системе координат (ТЦСК).
Так как динамический алгоритм определения ориентации вращающегося объекта потребителя вычисляет координаты в геоцентрической системе координат (ГЦСК), для этого был разработан дополнительный алгоритм пересчета координат из ГЦСК в ТЦСК.
Патентно информационный поиск
-
Патент № 2122217. Способ угловой ориентации объектов по радионавигационным сигналам космических аппаратов (варианты)
Патентообладатель Красноярский государственный технический университет