Файл: Отчет по лабораторной работе 7 Анализ точности систем управления.docx
Добавлен: 09.11.2023
Просмотров: 96
Скачиваний: 8
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
федеральное государственное автономное образовательное учреждение
высшего образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ ИТМО»
Отчет
по лабораторной работе №7 «Анализ точности систем управления»
по дисциплине «Теория автоматического управления»
Авторы: Есаулов Лев
Титова Екатерина
Факультет: СУиР
Группа: R33812
Преподаватель: Чепинский С.А
Вариант: 10

Санкт-Петербург, 2023
Цель работы. Исследование точностных свойств систем управления.
Порядок выполнения работы.
-
Исследуем систему с астатизмом нулевого порядка
Исходные данные:
Передаточная функция:

Параметры постоянного сигнала воздействия:


Общий коэффициент усиления разомкнутой системы:

-
Исследование стационарного режима работы: .
.

Моделируем замкнутую систему и получаем переходные процессы для трех различных значений коэффициента k и определяем предельное значение установившейся ошибки
 :
:
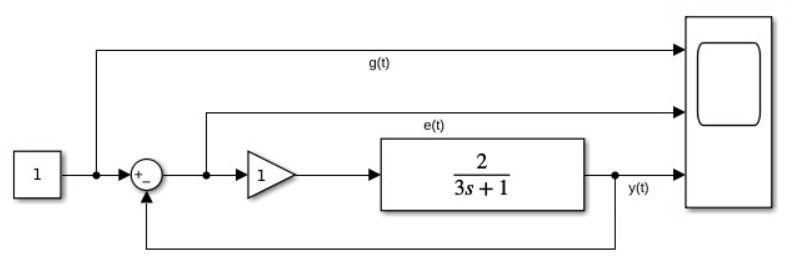
Рис 1.1. Схема моделирования системы с астатизмом нулевого порядка в стационарном режиме работы
При k = 1:

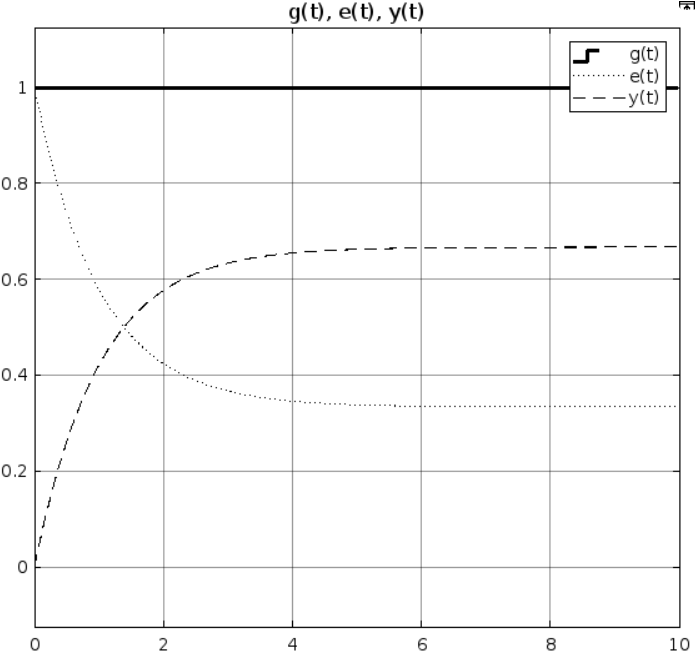
Рис 1.2 Результат моделирования при k = 1
При k = 5:
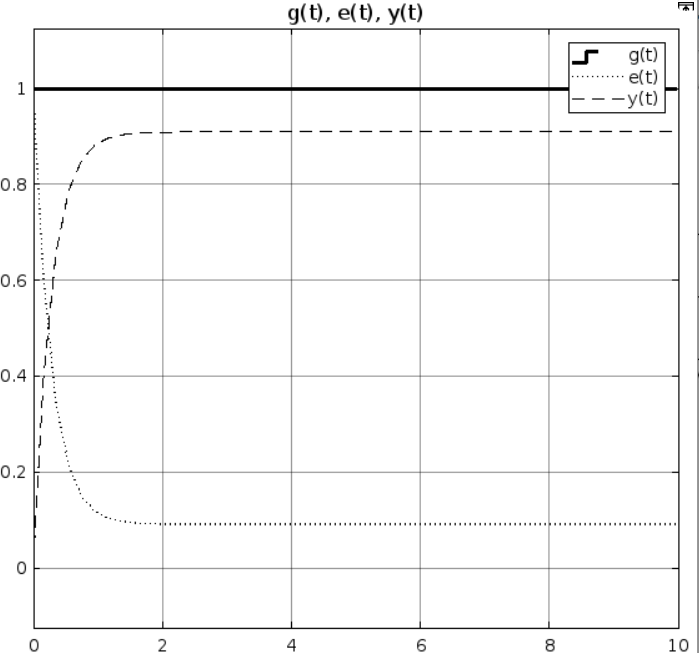
Рис 1.3 Результат моделирования при k = 5
При k = 10:
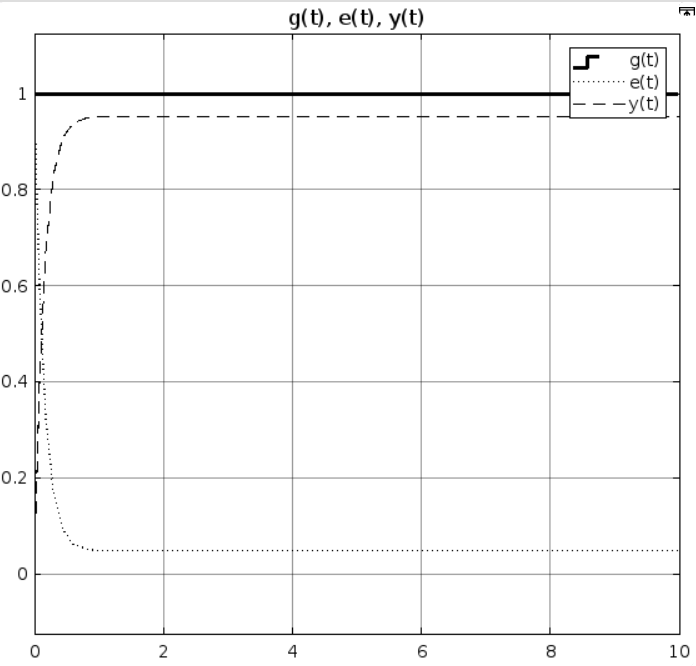
Рис 1.4 Результат моделирования при k = 10
-
Исследование режима движения с постоянной скоростью: .
.

Моделируем замкнутую систему и получаем переходные процессы для трех различных значений коэффициента k:
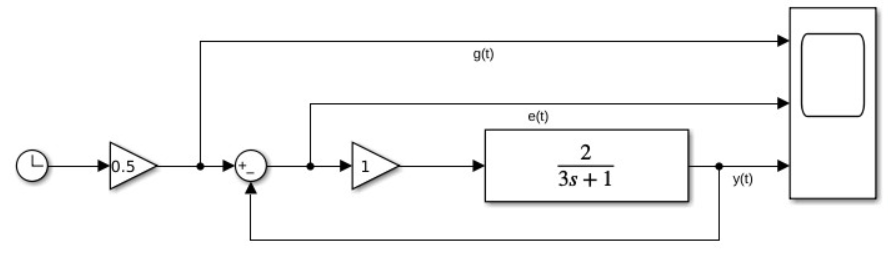
Рис 1.5. Схема моделирования системы с астатизмом нулевого порядка с режимом движения с постоянной скоростью
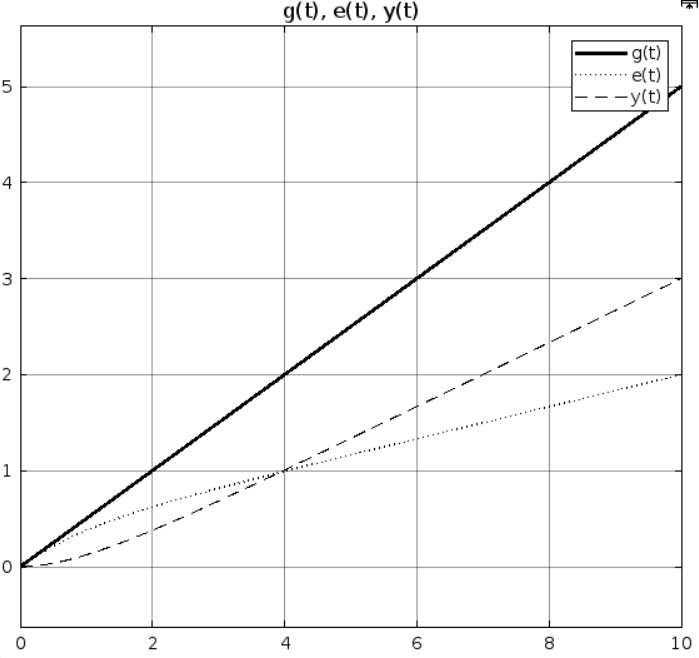
Рис 1.6. Результат моделирования при k = 1
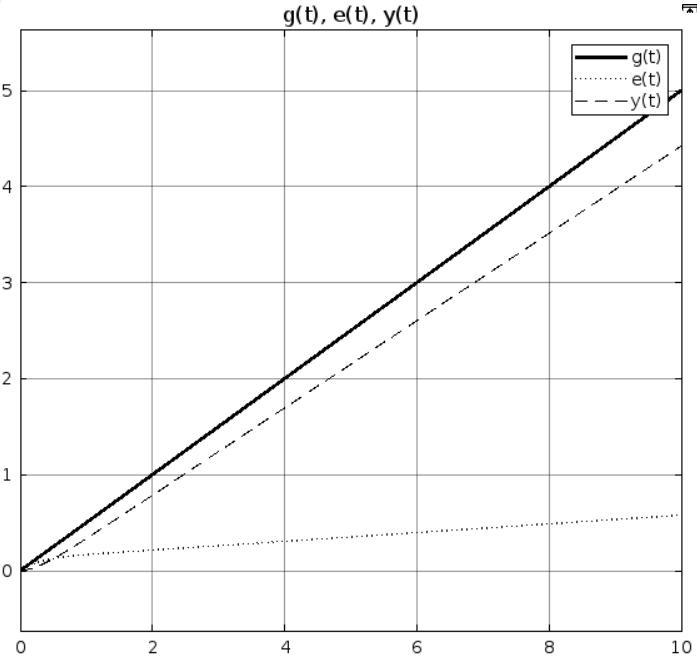
Рис 1.7. Результат моделирования при k = 5
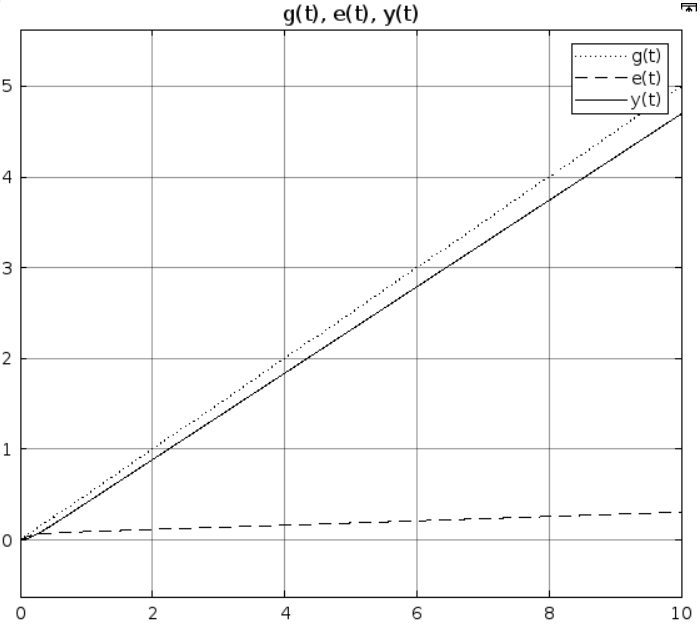
Рис 1.8. Результат моделирования при k = 10
-
Исследование системы с астатизмом первого порядка
Исходные данные:

Параметры постоянного сигнала воздействия:


Характеристики квадратично нарастающего задающего воздействия:

-
Исследование стационарного режима работы: .
.

Получаем переходные процессы для различных значений коэффициента
 и Определяем предельное значение установившейся ошибки
и Определяем предельное значение установившейся ошибки  :
:
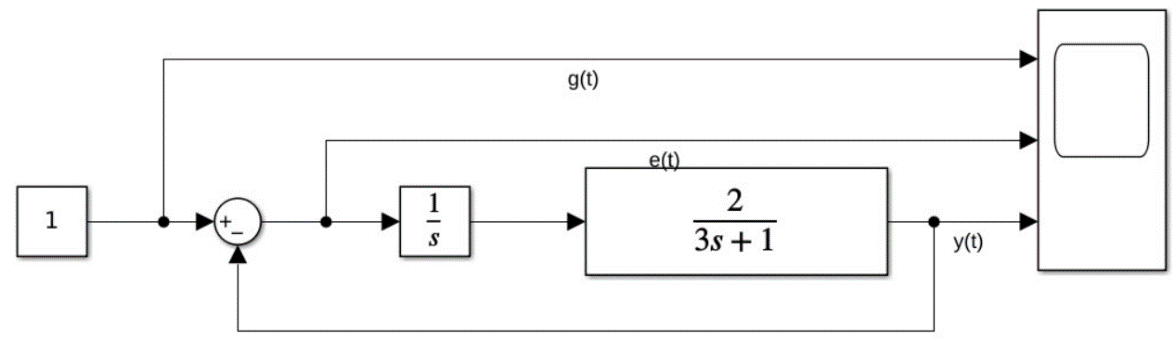
Рисунок 2.1 Схема моделирования системы с астатизмом первого порядка в стационарном режиме работы
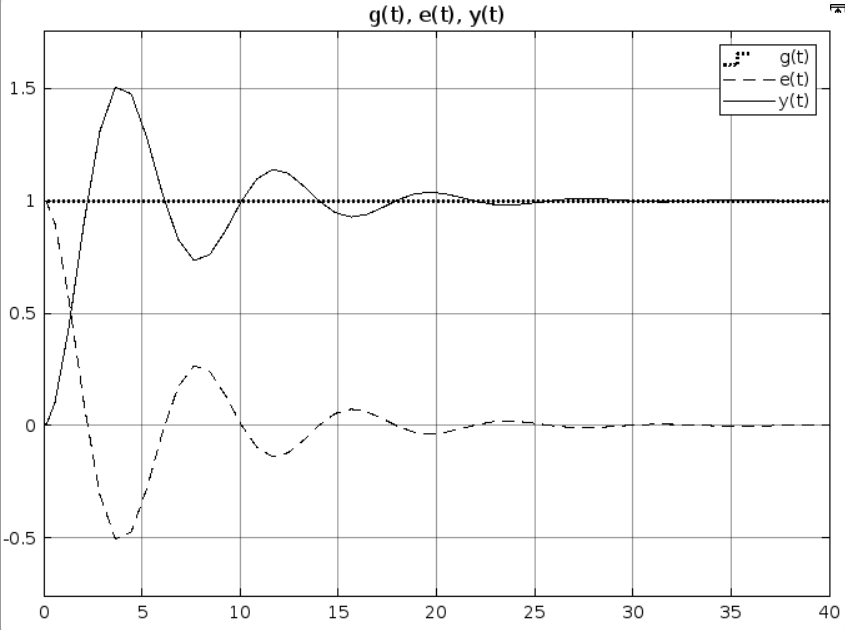
Рис 2.2. Результат моделирования при k = 1

Рис 2.3. Результат моделирования при k = 5
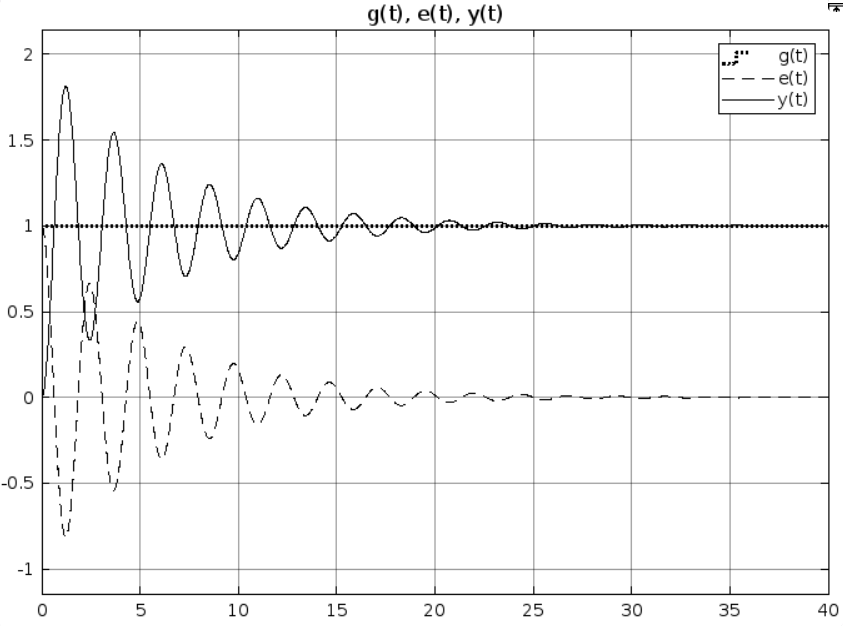
Рис 2.4. Результат моделирования при k = 10
-
Исследование режима движения с постоянной скоростью: .
.
Определяем предельное значение установившейся ошибки
для различных значений коэффициента :
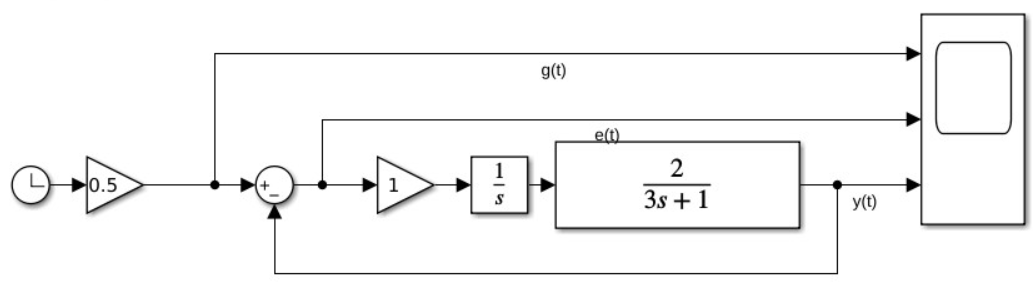
Рис 2.5. Схема моделирования системы с астатизмом первого порядка с режимом движения с постоянной скоростью
При k = 1:

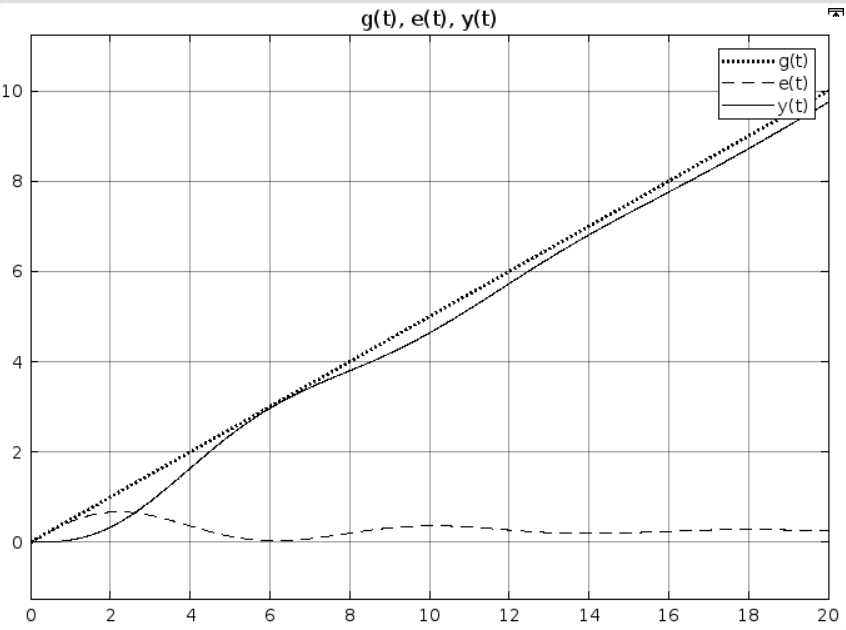
Рис 2.6. Результат моделирования при k = 1
При k = 5:

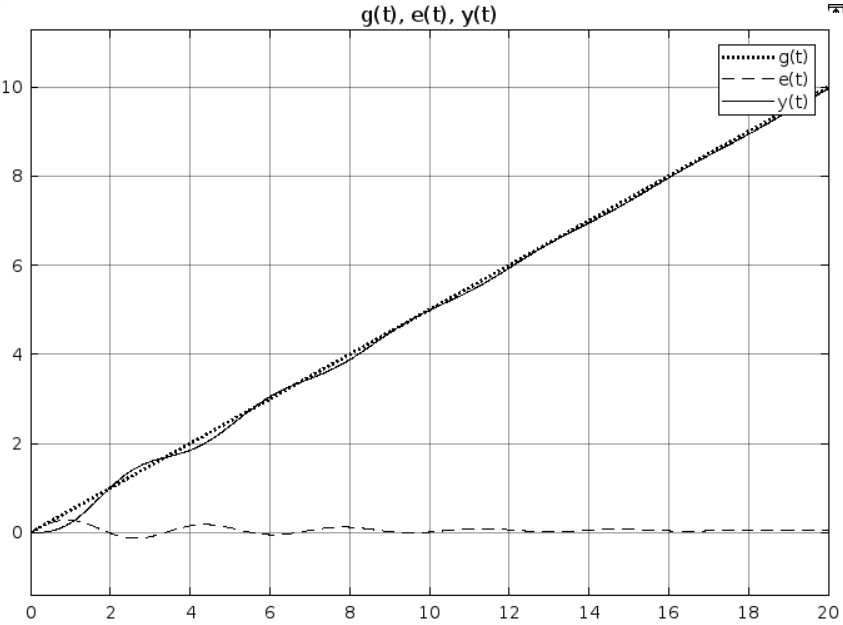
Рис 2.7. Результат моделирования при k = 5
При k = 10:

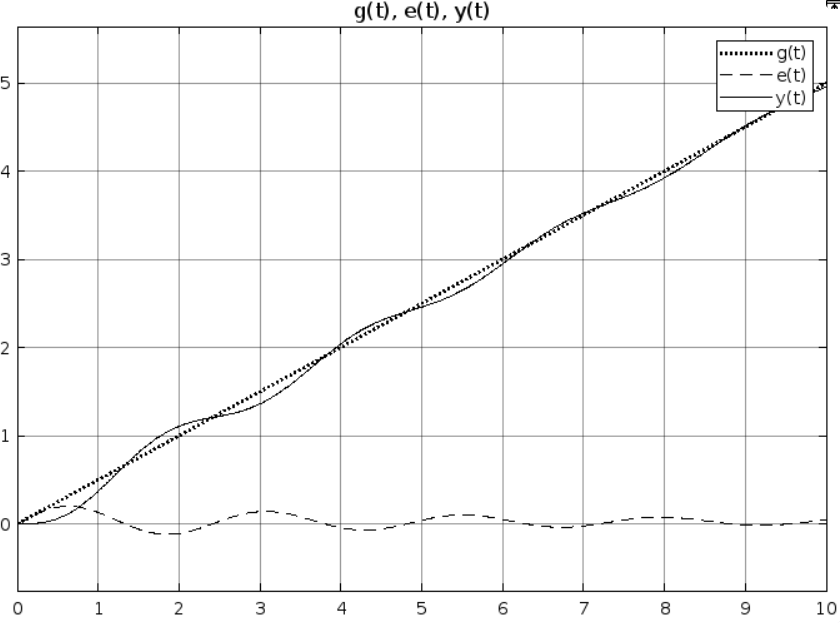
Рис 2.8. Результат моделирования при k = 10
-
Исследование режима движения с постоянным ускорением :
:


Рис 2.9. Схема моделирования системы с астатизмом первого порядка с режимом движения с постоянным ускорением
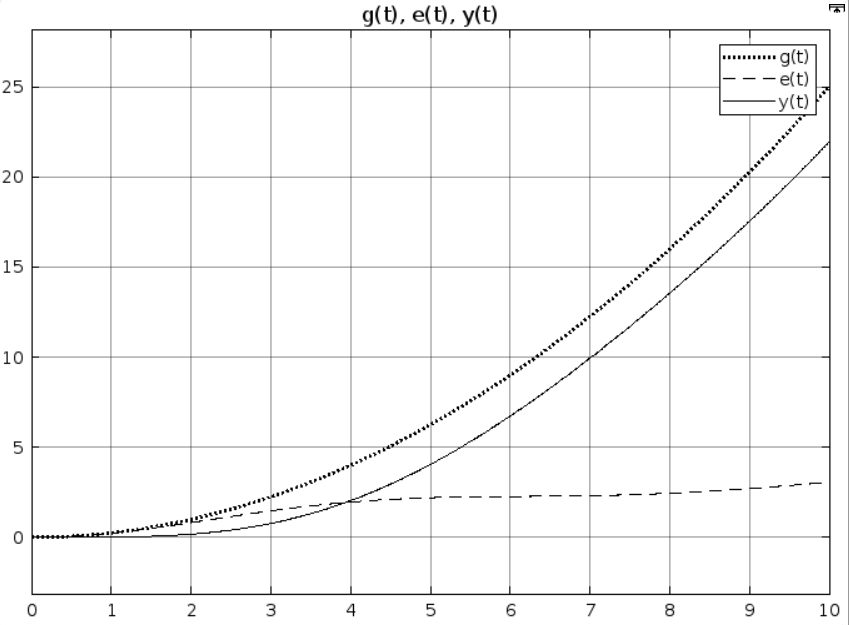
Рис 2.10. Результат моделирования при k = 1
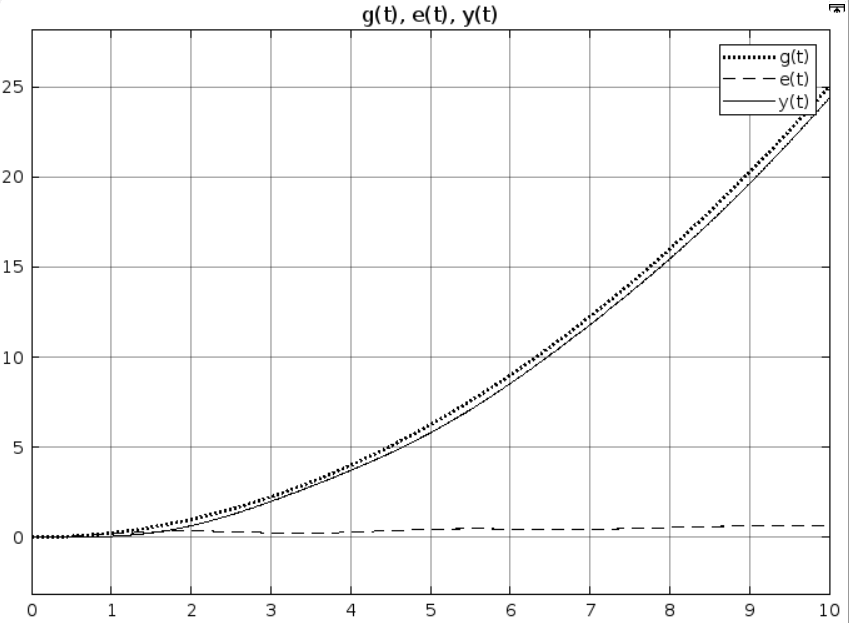
Рис 2.11. Результат моделирования при k = 5
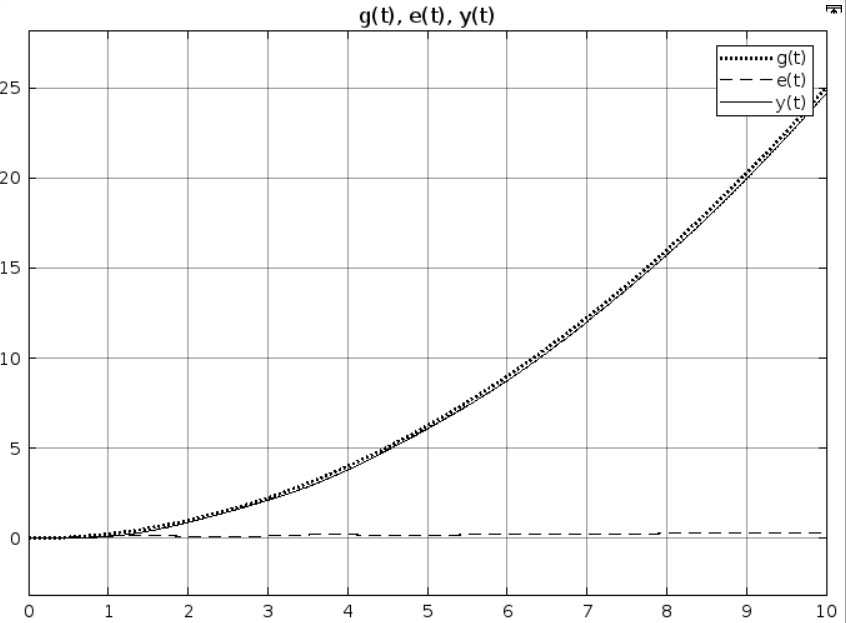
Рис 2.12. Результат моделирования при k = 10
-
Исследование влияния внешних возмущений.
Исходные данные:
Передаточная функция:

 :
: 

-
В соответствии с вариантом задания собираем схему моделирования
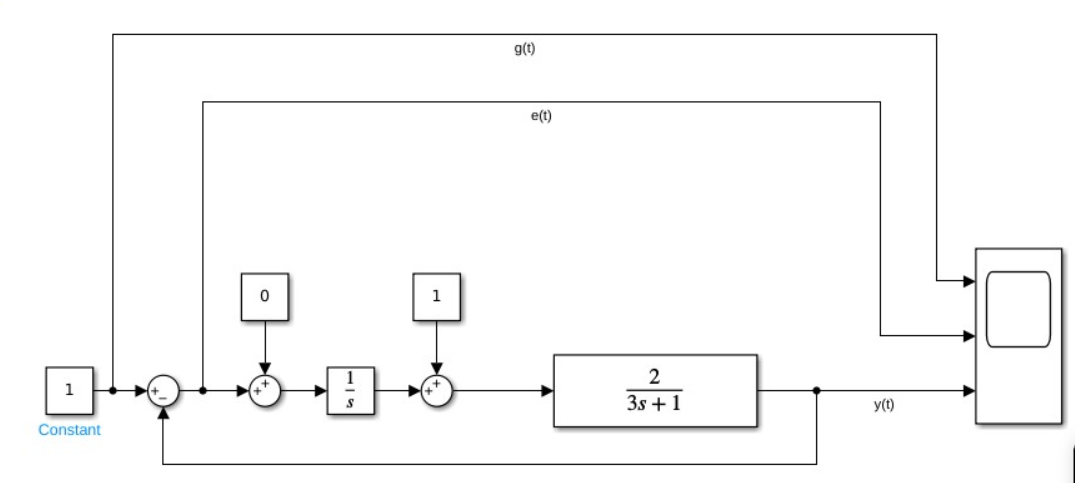
Рис 3.1. Схема моделирования возмущенной системы
-
Определим предельное значение установившейся ошибки при
f1(t) = 1;
f2(t) = 0;
g(t) = 1;

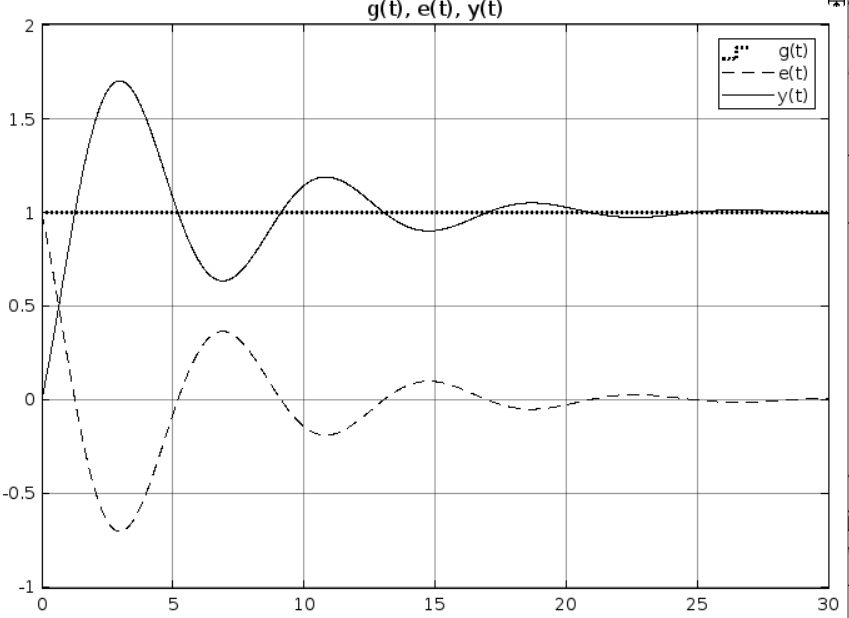
Рис 3.2. Результаты моделирования
-
Определим предельное значение установившейся ошибки при
f1(t) = 0;
f2(t) = 0.5;
g(t) = 1;

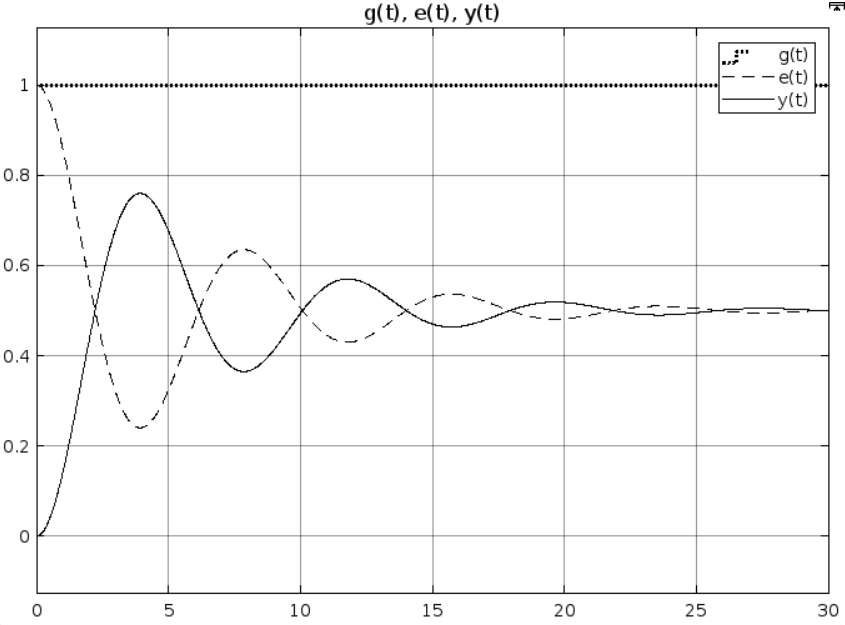
Рис 3.3. Результаты моделирования
-
Исследование установившейся ошибки при произвольном входном воздействии.
Задающее воздействие:

Передаточная функция:
Моделируем замкнутую систему с регулятором
 :
: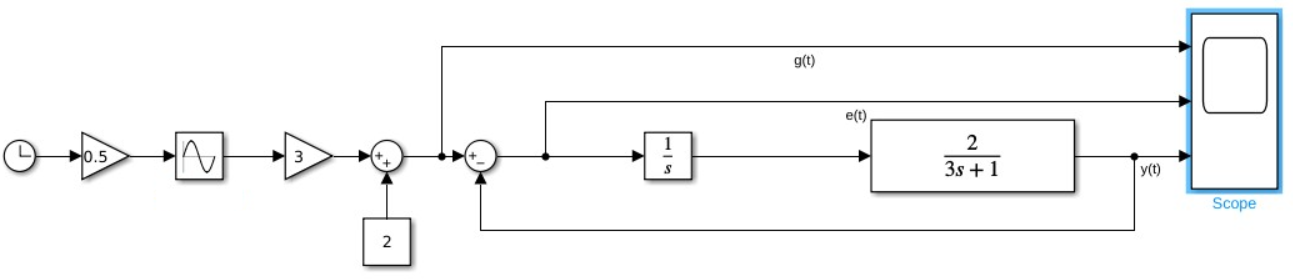
Рис 4.1. Схема моделирования системы
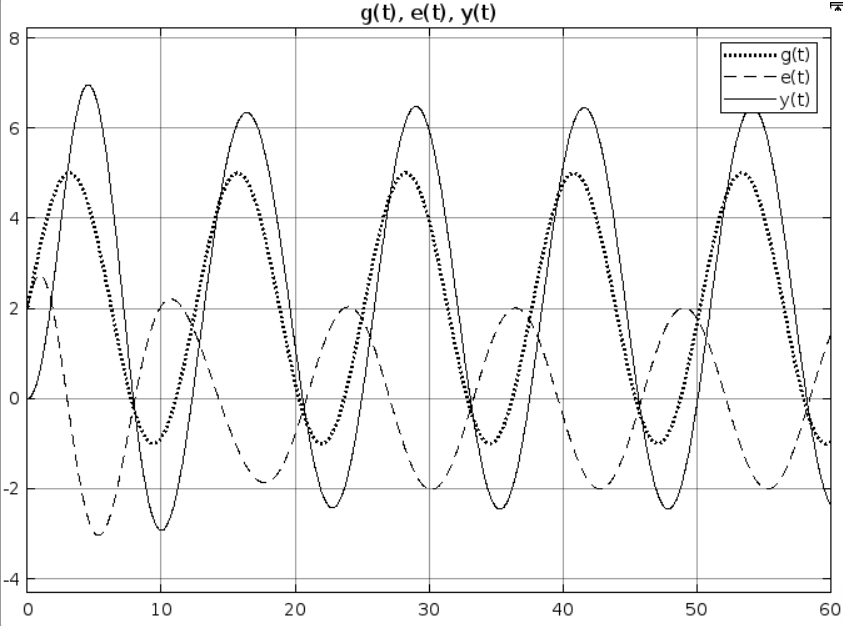
Рис 4.2 Результаты моделирования
Получаем приближенное аналитическое выражение для
 , сохранив в ряде Тейлора три первых члена:
, сохранив в ряде Тейлора три первых члена:



Вывод: По графикам моделирования системы с астатизмом нулевого порядка мы можем увидеть, что значение установившейся ошибки уменьшается с увеличением коэффициента k регулятора в стационарном режиме работы. В режиме движения с постоянной скоростью график ошибки при более высоких значениях коэффициента k регулятора лежит ближе к нулевой оси. По графикам моделирования системы с астатизмом первого порядка мы видим, что значение установившейся ошибки равно 0 при любых значениях коэффициента k регулятора в стационарном режиме работы. В режиме движения с постоянной скоростью значение установившейся ошибки всегда равно V/k. В режиме движения с постоянным ускорением график ошибки при более высоких значениях коэффициента k регулятора лежит ближе к нулевой оси. По графикам моделирования возмущённой системы видно, что при отсутствии возмущения f