Добавлен: 10.11.2023
Просмотров: 104
Скачиваний: 5
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
- Роботы-животные. Автоматизированные устройства, которые заменяют домашних животных, копируя их поведение и звуки.

Рисунок 4 – развлекательный робот андроид
Таким образом, существуют различные виды роботов, отличающиеся способами управления, техническими возможностями, назначением. Некоторые автоматизированные устройства способны полностью заменить труд человека. Робот может выполнять команды пользователя или действовать автономно, следуя заложенной программе. Большинство автоматических устройств в отличие от человека, не чувствительны к воздействию негативных факторов, что позволяет использовать роботов в разных сферах.
1.3. Изучение среды программирования Lego Mindsorms EV3
Среда программирования Lego Mindsorms EV3 была разработана компанией National Instruments. В ее основе лежит мощная среда инженерного программирования LabVIEW.
Программирование является визуальным и осуществляется перетаскиванием пиктограмм в рабочее окно. Графический интерфейс язык программирования EV3 поддерживает большинство структур программирования и дает возможность создавать сложные алгоритмические конструкции.
Детали которые есть в конструкторе LEGO Education MINDSORMS EV3 Рисунок 5):
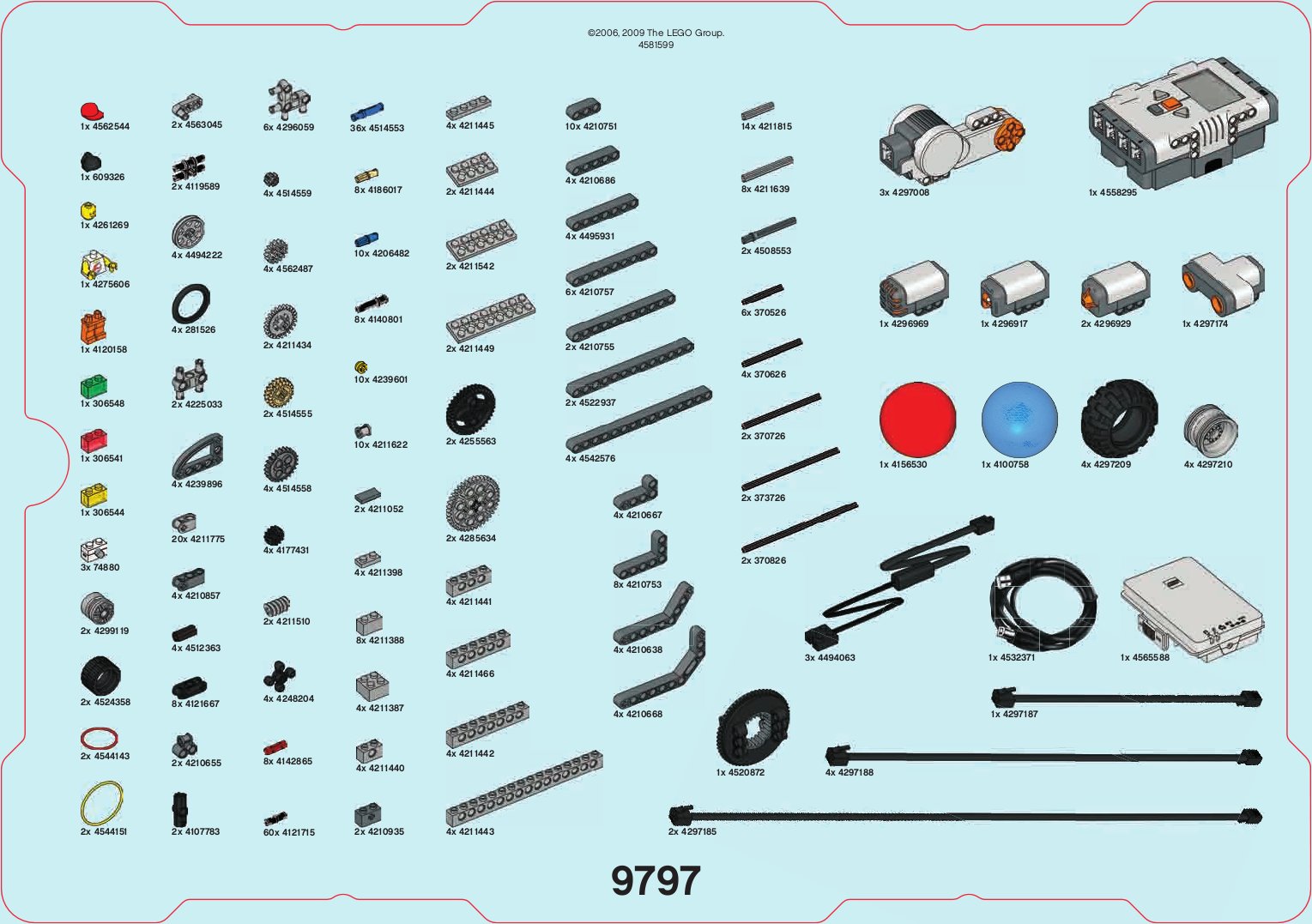
Рисунок 5 - Детали конструктора LEGO Education MINDSORMS EV3
Набор Lego Mindstorms содержит центральный блок, управляющий всеми устройствами, моторы, датчики, а также, конструктивные элементы серии Lego Technics, с помощью которых можно создавать экспериментальные устройства, учебные и научные установки и различных роботов.
Модуль (блок) EV3 (Рисунок 6).
Экран блока показывает, что происходит внутри модуля EV3, и позволяет использовать интерфейс модуля. Также, он позволяет вводить и выводить текстовые и числовые данные, а также, отображать графические элементы при работе вашей программы или в процессе проведения эксперимента. Например, вы можете запрограммировать экран таким образом, чтобы он выводил текстовые сообщения в процессе работы программы или число, которое является результатом математических вычислений или данными, полученными с датчиками.

Рисунок 6 - Модуль (блок) EV3
После запуска программного обеспечения LEGO MINDSTORMS Education EV3 открывается основное окно программы (лобби) (Рисунок 7).
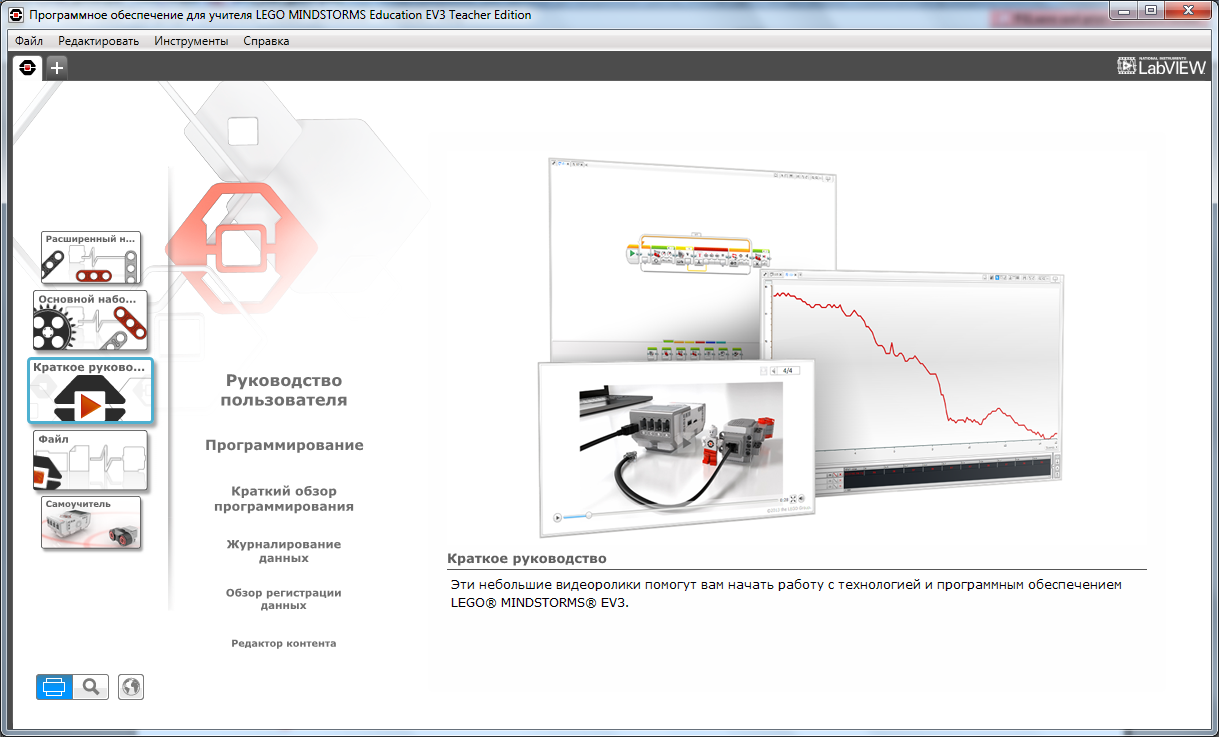
Рисунок 7 – Основное окно программы MINDSTORMS Education EV3
Это окно содержит меню, позволяющие работать:
- с основным и расширенным набором компонентов (описание наборов и инструкции по сборке моделей);
- кратким руководством пользователя (теория и базовые примеры программирования);
- проектом;
- самоучителем.
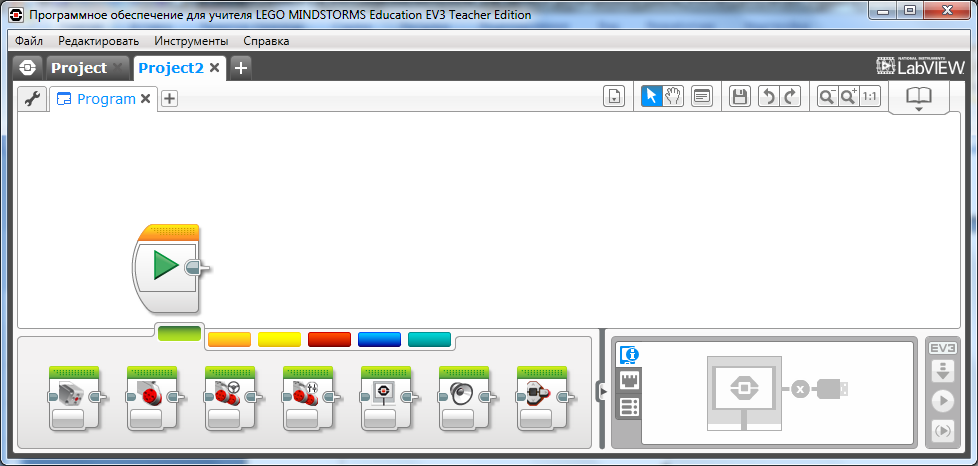
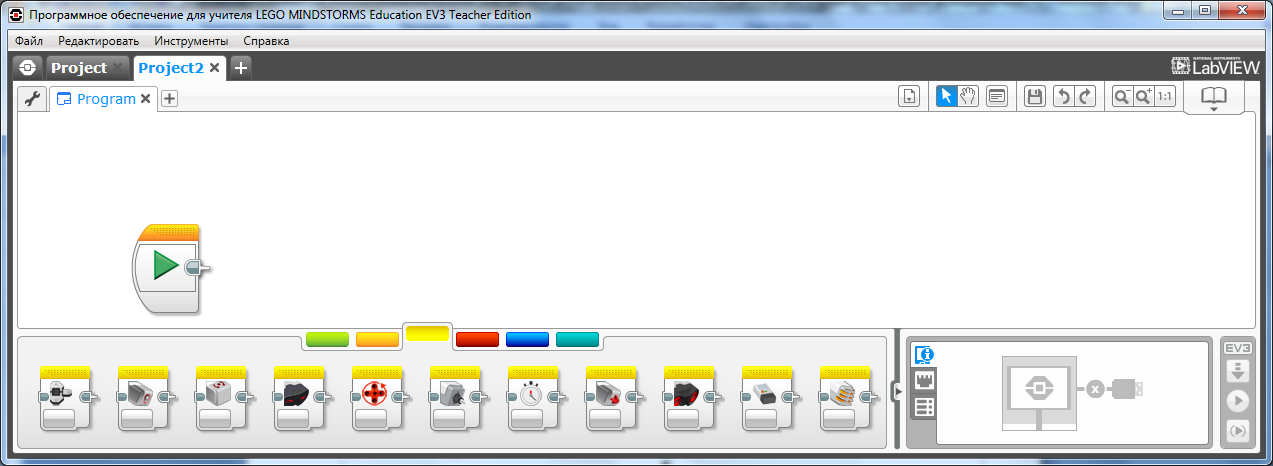
Основным для работы с моделью является окно проекта (Рисунок 8). Проект может содержать программы управления роботом. В этом случае открывается окно, показанное ниже:
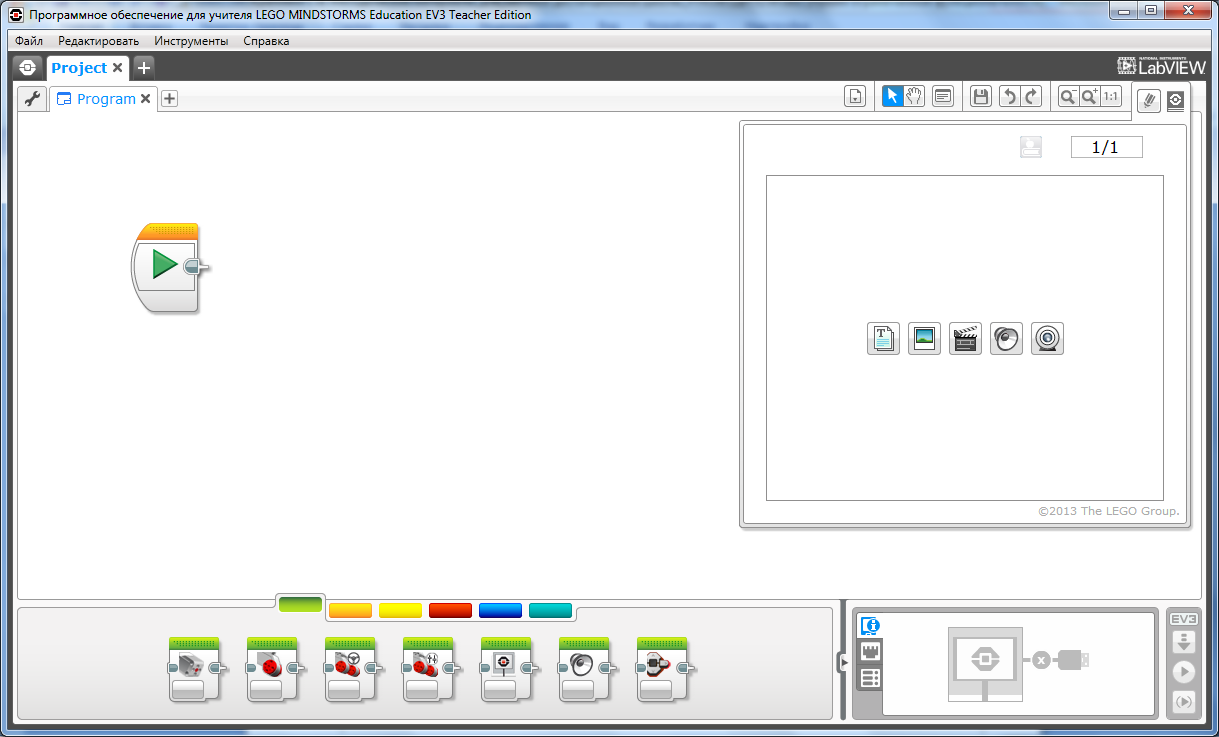
Рисунок 8 – Окно проекта
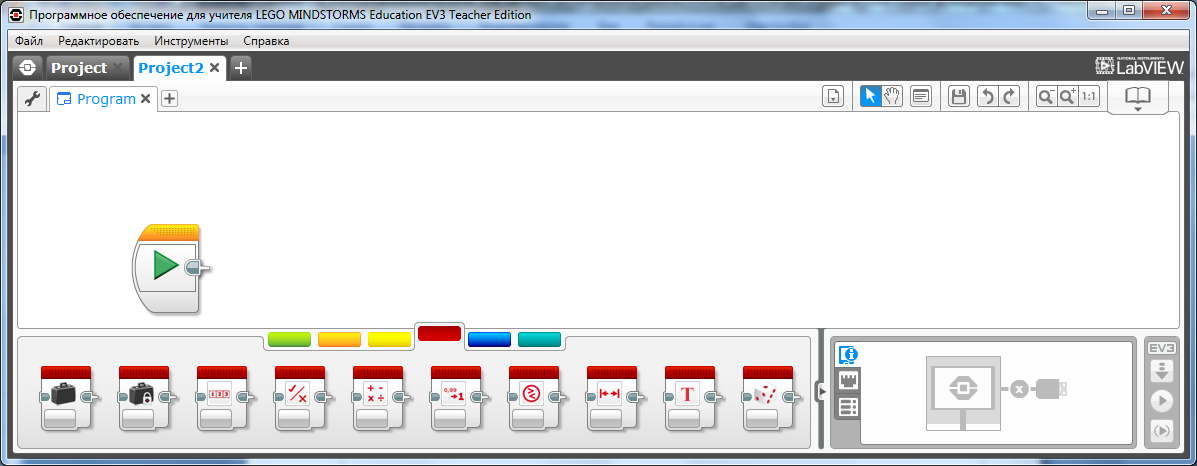
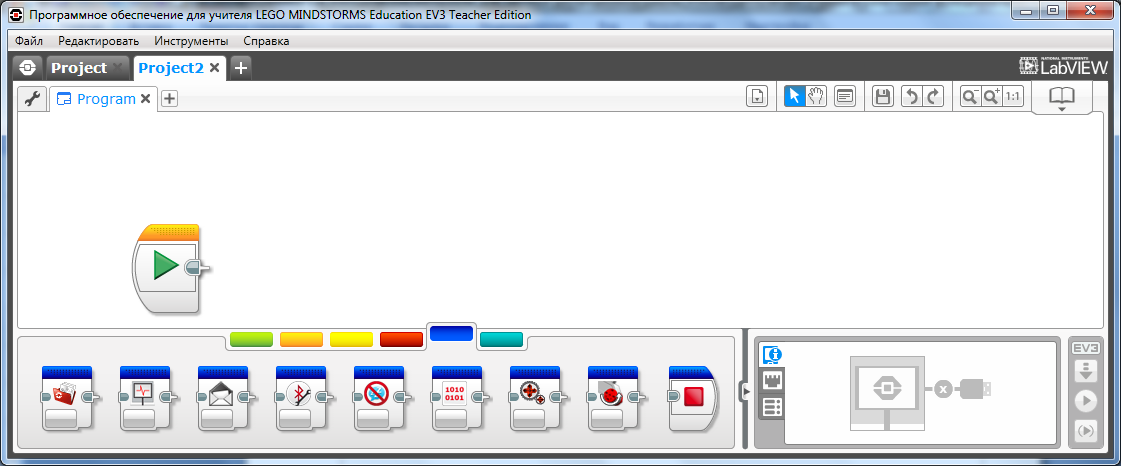
Основные программные блоки:
1. Палитра блоков «Действие»
2. Палитра блоков «Управление операторами»
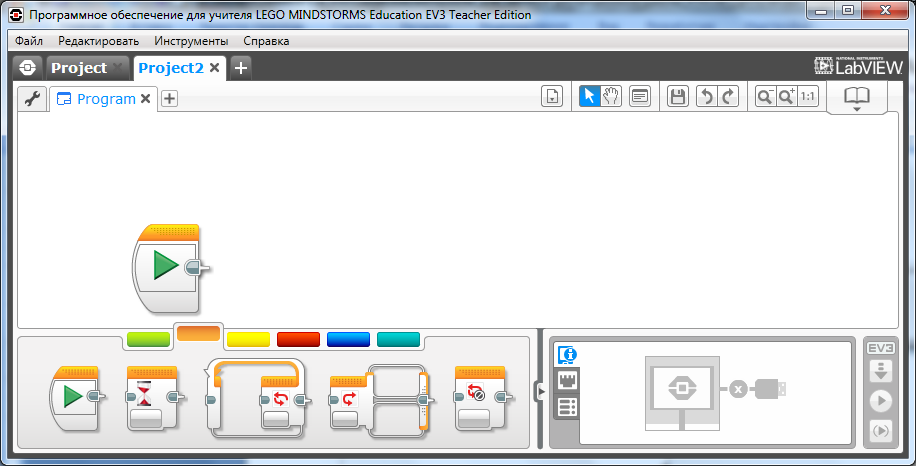
3. Палитра блоков «Датчик»
-
Палитра блоков «Операции с данными»
-
Палитра блоков «Дополнения»
Таким образом, на базе конструктора LEGO MINDSTORMS Education и контроллера EV3 школьники могут научиться создавать роботизированные системы. При помощи программы LEGO MINDSTORMS Education EV3 могут создавать различного рода программы, которые будут тестировать и проверять на разработанных роботах. Для освоения принципов конструирования и создания роботов, школьникам необходимо обладать базовыми навыками программирования на простейших языках программирования.
2 Практическая часть
2.1 Создание робота: основные детали
Для создания Робота-уборщика нам потребовался школьный конструктор LEGO MINDSTORMS Education EV3 и установленная на ПК программа для программирования робота на движение.
Основные детали для создания Робота-уборщика представлены на рисунке 9 – это системный блок EV3 и собранные механизмы из конструктора для его движения.
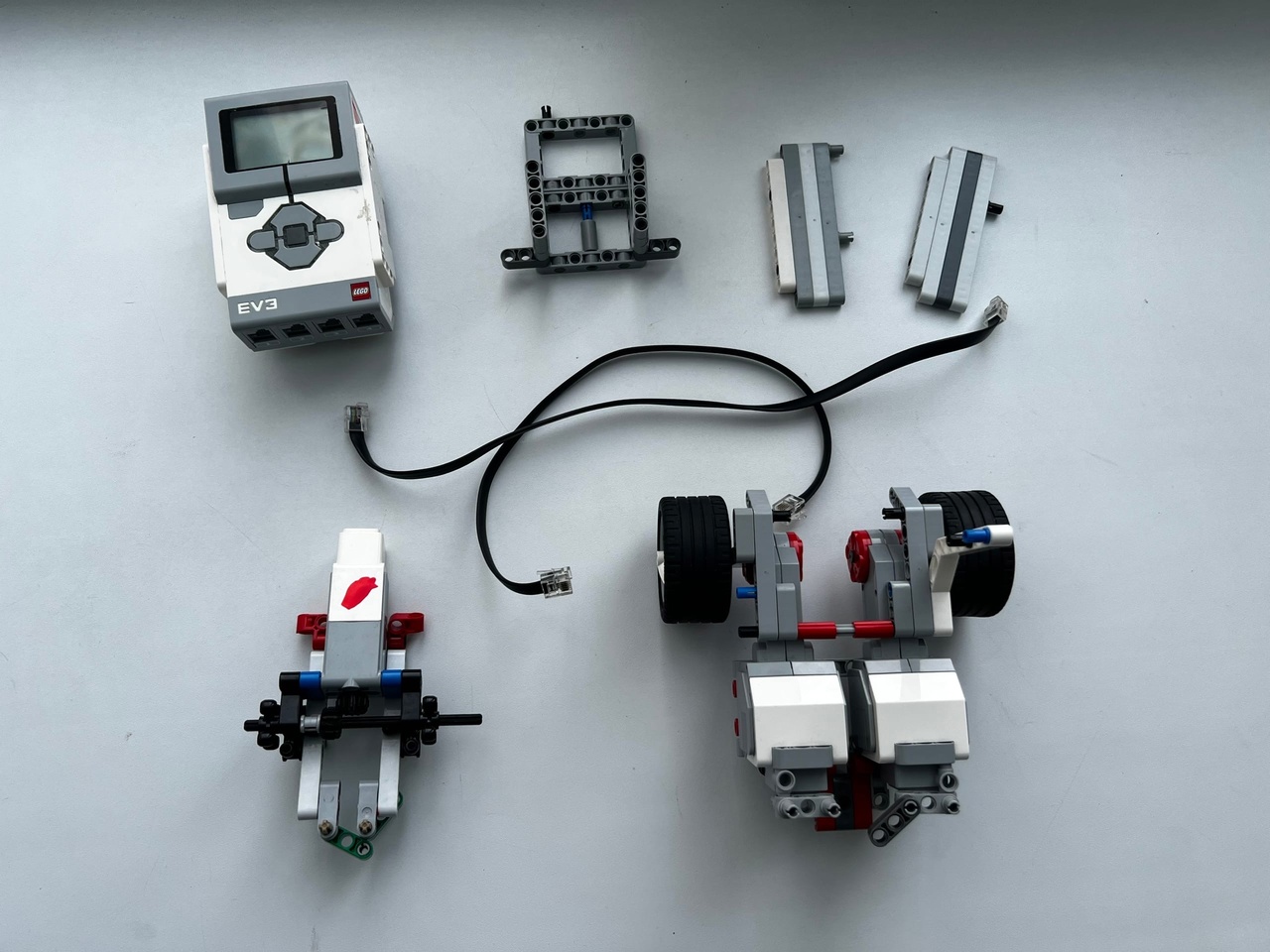
Рисунок 9 – Основные детали для создания Робота-уборщика
На рисунке 10 представлено два больших мотора, которые управляют правым и левым колесом и позволяют роботу двигаться вперед, назад и делать повороты. Большой мотор - это мощный «умный» мотор. В нем есть встроенный датчик вращения с разрешением 1 градус для точного контроля. Большой мотор оптимизирован для выполнения роли приводной платформы в ваших роботах. Используя программные блоки «Рулевое управление» или «Независимое управление моторами» в программном обеспечении EV3, большие моторы могут одновременно координировать работу.

Рисунок 10 – Большие моторы
Для того, чтобы робот начал движение мы подключили большие моторы к портам вывода на модуле EV-3 (Рисунок 11). Он представляет собой программируемый интеллектуальный модуль, управляющий моторами и датчиками и обеспечивающий беспроводное подключение.

Рисунок 11 - Модуль EV-3
Также работа Робота-убощика невозможна без механизма вращения щупальц, которыми он должен загребать мусор в контейнер. Щупальца подключены к среднему мотору (Рисунок 12), который имеет встроенный датчик вращения (с разрешением 1 градус). Средний мотор меньше и легче, чем большой мотор. Это означает, что он способен реагировать быстрее, чем большой мотор. Средний мотор мы запрограммировали таким образом, чтобы он включался или выключался, чтобы можно было управлять мощностью мотора, чтобы он работал в течение определенного времени или выполнял определенное число оборотов. Конструкция на рисунке 13 - это ковш, который собирает весь мусор в себя.
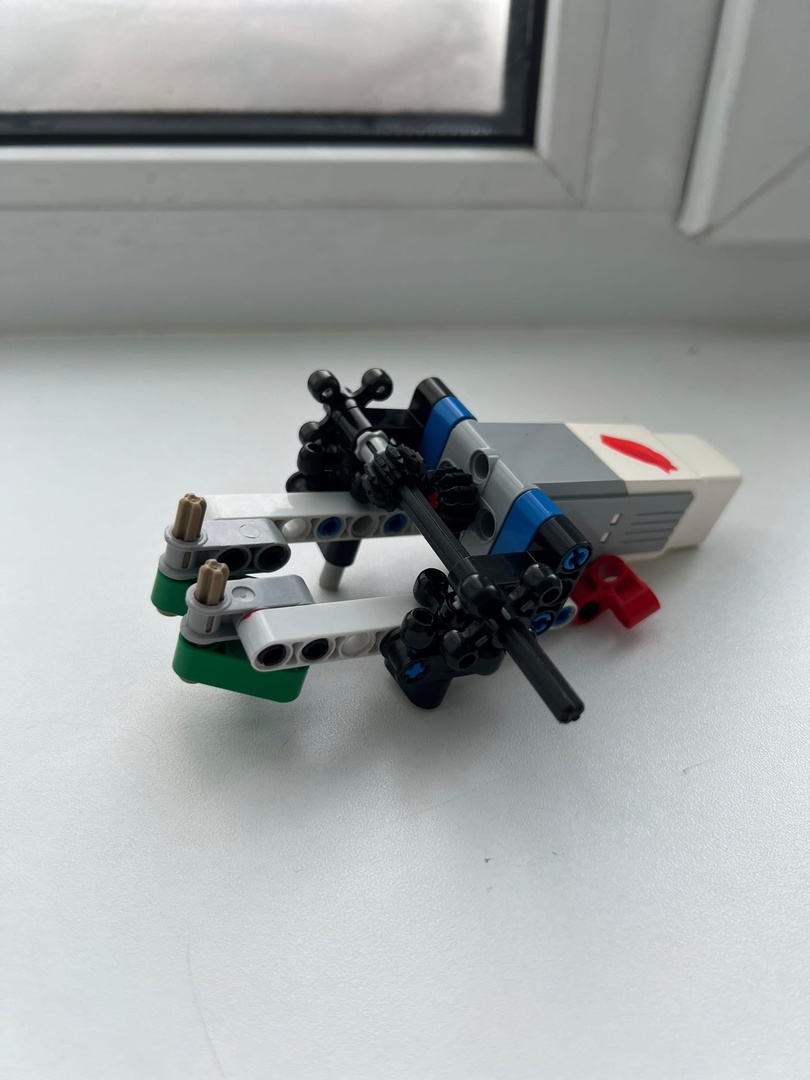
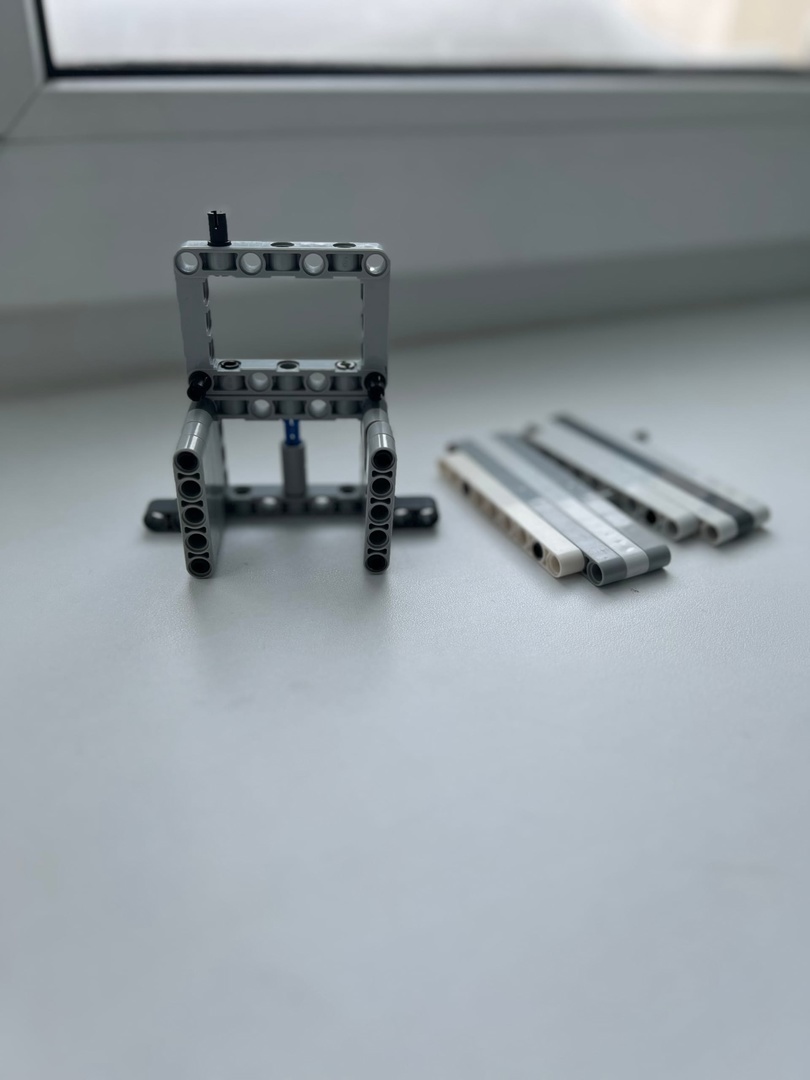
Рисунок 12 - Щупальца - щетки Рисунок 13 – Ковш-контейнер
Готовая конструкция робота выглядит следующим образом (Рисунок 14). Осталось запрограммировать Робота-уборщика на движение по полю и вращение щеток – щупальцев.
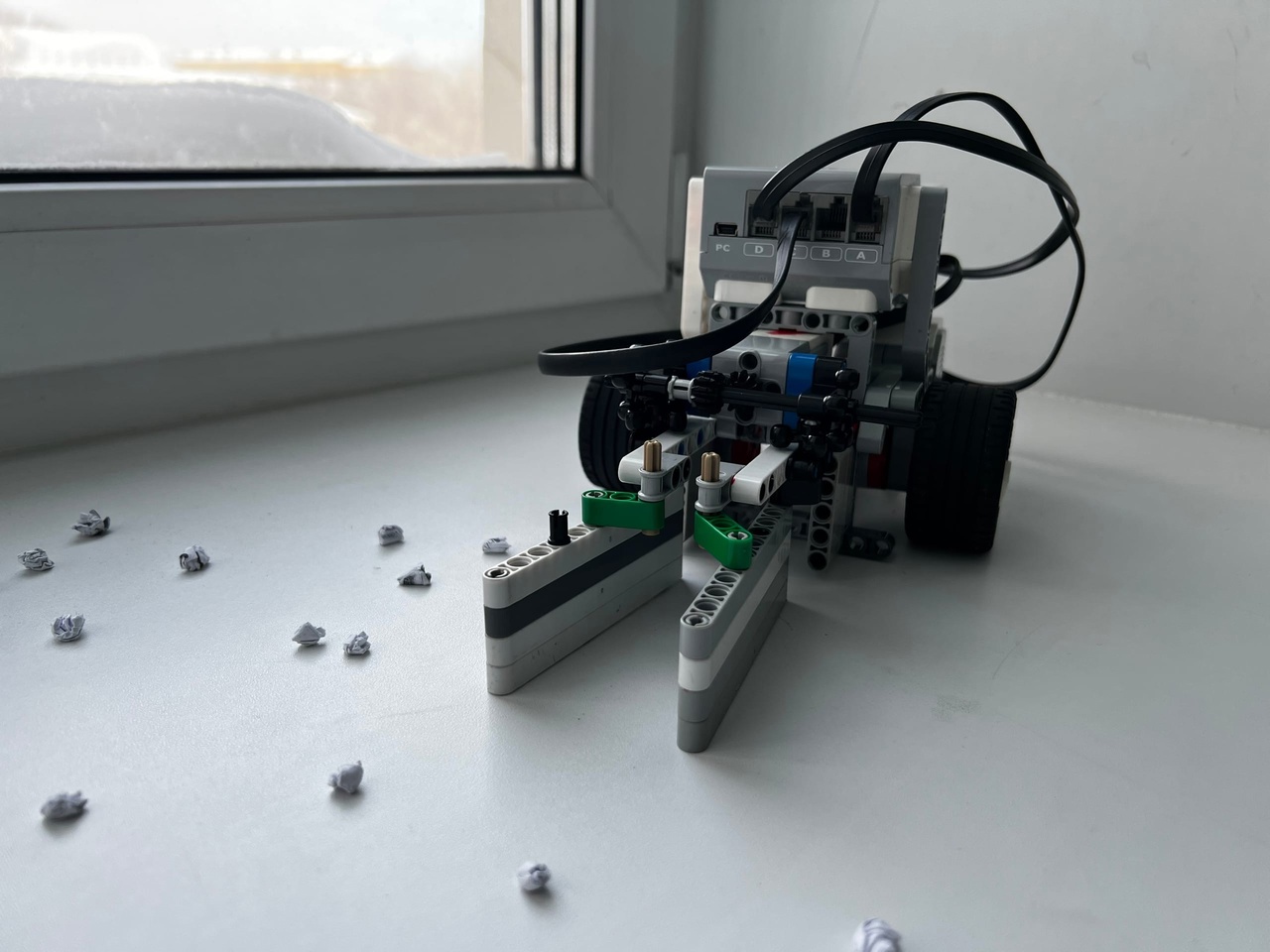
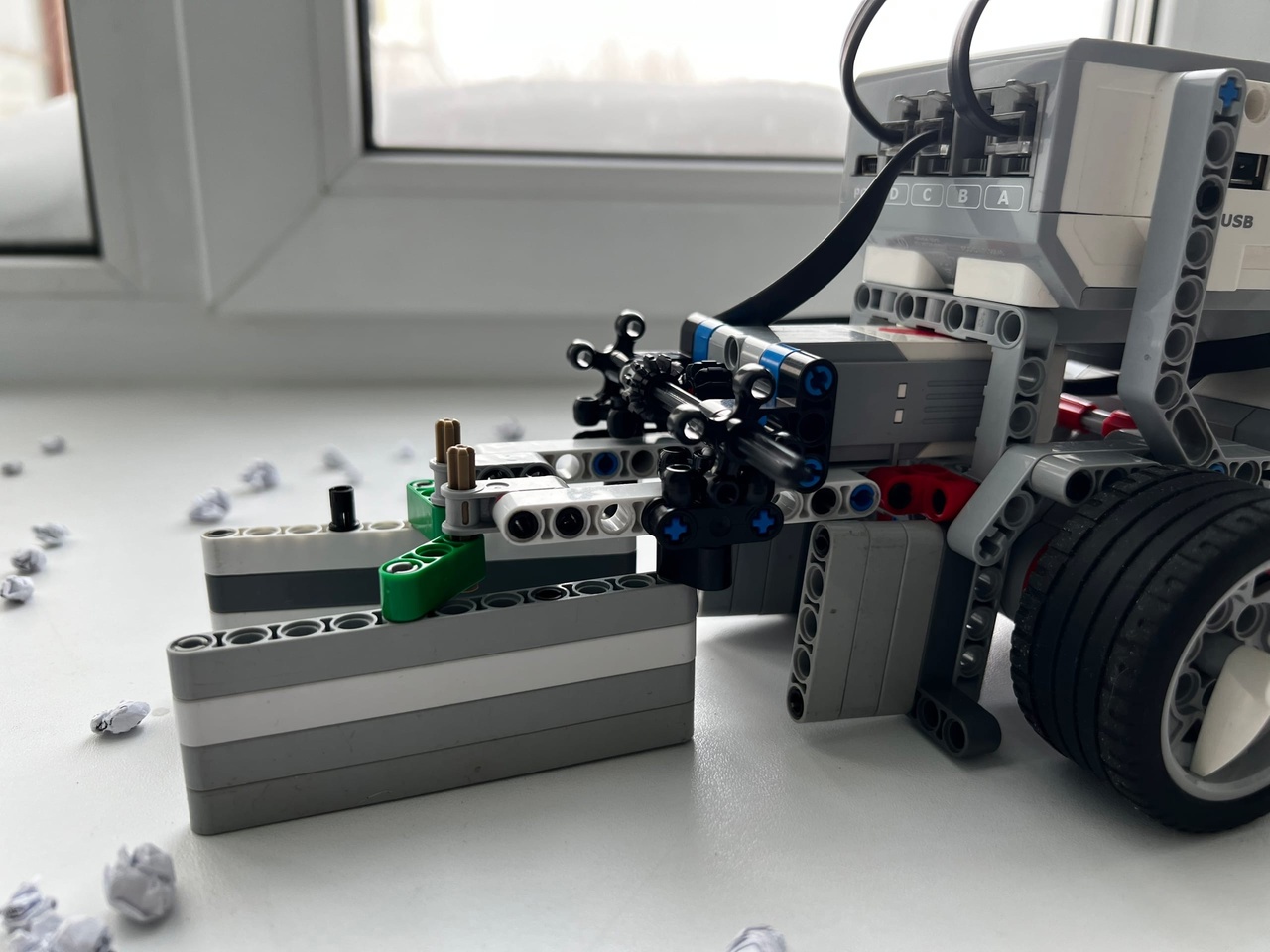
Рисунок 14 – Робот-уборщик
2.2 Программирование Робота-уборщика
Для того чтобы Робот-уборщик двигался по прямой и щетками собирал мусор в контейнер, мы пришли к выводу, что должны занести основной алгоритм работы программы в цикл, так как робот повторяет одни и те же действия. А именно в программе должны беспрерывно работать два больших мотора, которые отвечают за движение и параллельно с ними должен средний мотор вращать щетки.
На рисунке 15 представлена готовая рабочая программа Робота-уборщика.
Синим цветом показана работа двух больших моторов, подключенных к портам вывода A и D. Они заставляют колеса двигаться вперед с мощностью 30 %.
Параллельно с движением колес происходит вращение среднего мотора и всего механизма в целом, который подключен к порту вывода С. Средний мотор вращает щупальца с мощность 100%. Розовым цветом на рисунке показан Цикл, который непрерывно выполняется в течение 20 секунд.
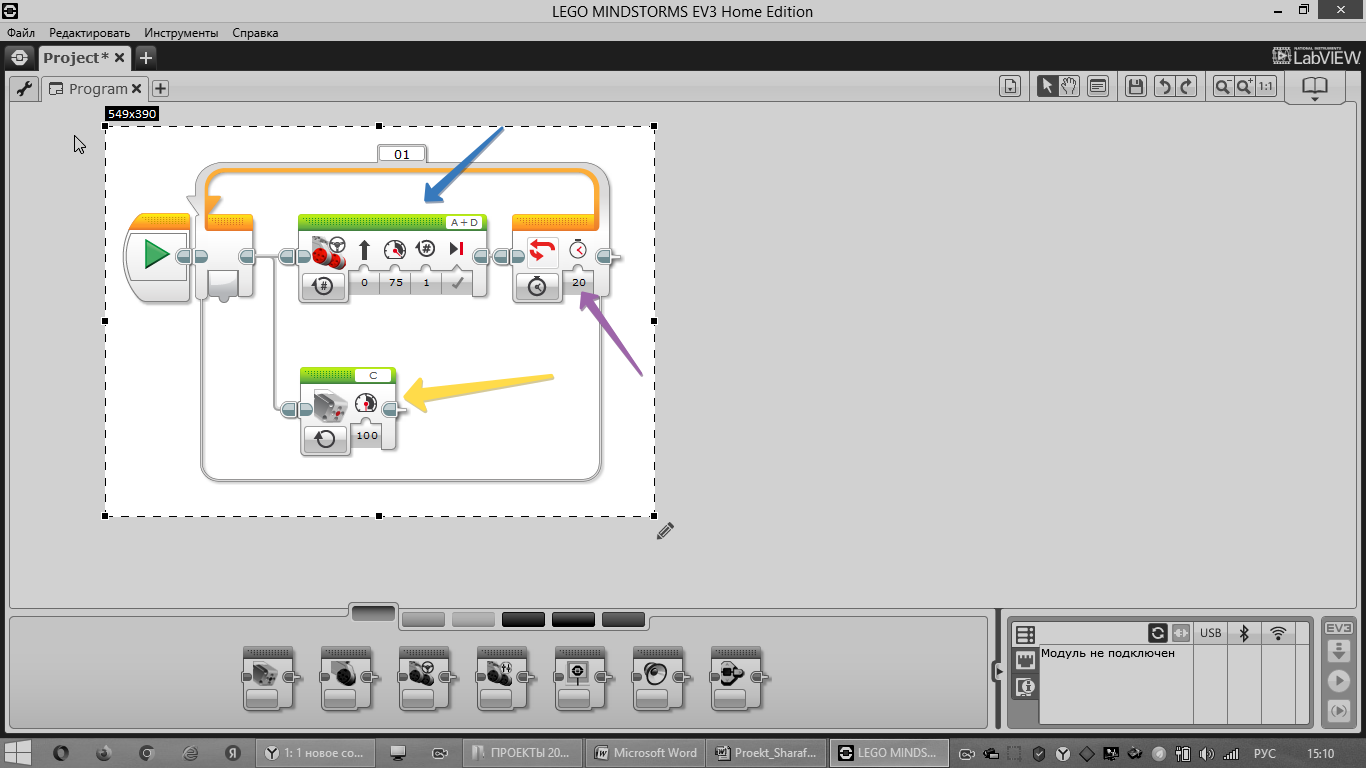
Рисунок 15 – Робот-уборщик
Выполнив данный проект, мы достигли поставленной цели, разработали модель автономного Робота-уборщика (Рисунок 16) - моего первого робота из Lego.
Мы проверили его в работе, которую записали на видео. Конечно, этот проектный продукт требует еще много доработок. Проект не решит всех задач, связанных с уборкой, но собрать мусор в определенный контейнер вполне сможет.

Рисунок 16 – Мой первый робот из Lego
ЗАКЛЮЧЕНИЕ
В начале работы была сформулирована цель: создать и запрограммировать Робота-уборщика, записать на видео его работу.
Проанализировав следующие материалы мы добились определенных результатов:
-
узнали историю возникновения роботов; -
выяснили какие бывают роботы; -
изучили среду программирования Lego Mindstorms EV3; -
собрали и запрограммировали Робота-уборщика из конструктора LEGO Education MINDSORMS EV3; -
записали работу Робота-уборщика на видео.
В результате реализации проекта были созданы условия для приобщения к техническому творчеству.
Мы овладели необходимыми навыками и умениями конструирования из Lego Mindstorms EV3, умениями работать по схемам и программировать алгоритмы. Приобрели навык решения творческих задач в ходе реализации проекта. Научились получать информацию из разных источников (в том числе из сети Интернет), осмысливать ее и применять в своей деятельности.
Возможные перспективы моей работы: Собранный в ходе работы материал о роботах и проектный продукт – Робот-уборщик может быть использован на внеурочных занятиях. Созданная модель «Робота-уборщика» поможет облегчить труд.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Горский В.А. «Техническое конструирование», - М. ; Дрофа 2010
2. Йошихито Исогава «Большая книга идей LEGOTechnic. Машины и механизмы» Эксмо, 2017г.
3. Космачева М.В Начальное техническое моделирование: сборник методических материалов. -М.: «Перо», 2016.
4. Мельникова О.В. Лего-конструирование. Презентации в электронном приложении. – Волгоград: Учитель, 2015.
5. Миназова Л.И. Особенности развития инженерного мышления у детей школьного возраста. Молодой ученый. 2015.
6. [Электронный ресурс] // Режим доступа: https://nlo-mir.ru/bezrubriki/43752-dvornik.html
7. [Электронный ресурс] // Режим доступа: https://ru.wikipedia.org/
8. [Электронный ресурс] // Режим доступа: https://filaretuos.livejournal.com/203214.html
9. [Электронный ресурс] // Режим доступа: https://rsbor-msk.ru/