Файл: Министерство цифрового развития, связи и массовых коммуникаций российской федерации федеральное государственное бюджетное образовательное учреждение высшего образования санктпетербургский государственный университет телекоммуникаций им..docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.11.2023
Просмотров: 25
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ, СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕЛЕКОММУНИКАЦИЙ ИМ. ПРОФ. М.А. БОНЧ-БРУЕВИЧА»
(СПбГУТ)
Факультет «Информационных систем и технологий»
Кафедра «Интеллектуальных систем автоматизации и управления»
| Направление подготовки: | 15.03.04 – Автоматизация технологических процессов и производств |
| Направленность (профиль): | Алгоритмическое и программное обеспечение киберфизических систем |
Лабораторная работа №4
по дисциплине:
Теория автоматического управления
| |
на тему:
Моделирование нелинейных систем управленияВариант 1 |
| | | Выполнила студентка группы | ИСТ-042 | |
| | | Абольянина Л.В. | ||
| | | Фамилия И. О. | ||
| | | Руководитель | ст. пр. каф. ИСАУ | |
| оценка | | | уч. степень, уч. звание | |
| | | Пиликина Е.А. | ||
| дата, подпись | | Фамилия И. О. | ||
Краткие теоретические сведения.
Модели нелинейных звеньев (Discontinuities)
| | Saturation – насыщение, в параметрах задаются верхний и нижний пределы (Upper limit и Lower limit). |
 | Dead zone – нечувствительность, «мертвая зона». В параметрах задаются пределы нечувствительности (Start of dead zone и End of dead zone). |
 | Rate Limiter – ограничитель скорости изменения сигнала, в параметрах задаются пределы на скорость увеличения (Rising slew rate) и на скорость уменьшения (Falling slew rate). |
 | Relay – реле, в параметрах задаются точки переключения (Switch on point и Switch off point), в также величины сигналов в режимах «включено» (Output when on) и «выключено» (Output when off). |
 | Backlash – люфт, «мертвый ход». В параметрах задаются величина мертвого хода (Deadband width) и начальное значение выхода (Initial output). |
 | Coulomb and Viscous Friction – кулоновское и вязкое трение. |
Б
 лок Scope (несколько сигналов)
лок Scope (несколько сигналов)К входу осциллографа (блока Scope) можно подключать несколько сигналов одновременно. Для этого их надо объединить в один векторный сигнал («жгут») с помощью блока Mux (мультиплексор) из группы Signal Routing.
Е
 сли используется два входных сигнала, первый изображается желтой линией, второй – фиолетовой. При передаче данных в рабочую область
сли используется два входных сигнала, первый изображается желтой линией, второй – фиолетовой. При передаче данных в рабочую область
Matlab в формате Array, массив будет содержать три столбца – время, первый сигнал и второй сигнал. Если сигналов больше, соответственно увеличивается количество столбцов массива.
Форматирование графика
По умолчанию команда plot рисует на активном графике новую кривую, стирая старые линии. Для того, чтобы существующие кривые сохранились, перед вызовом plot надо выполнить команду
>> hold on
Обратная ей команда
>> hold off
восстанавливает стандартный режим.
Каждый объект на графике (оси координат, надписи, линии и т.п.) представляют собой объекты, имеющие свойства. Для того, чтобы получить значение свойства, используют команду get, а для изменение свойства – команду set. Сокращение gca обозначает текущие (активные) оси координат (getcurrentaxes). Команда
>> get(gca)
выводит на экран все свойства осей и их значения. Для управления размером шрифта (он измеряется в пунктах) используется свойство Font Size:
>> get(gca, ‘FontSize’) % определить размер шрифта
ans =
10
>> set(gca, ‘FontSize’, 16) % изменить размер шрифта
Для того, чтобы настроить свойства отдельной линии, надо сначала получить ее хэндл (handle – ручка, рукоятка, указатель). Так называется уникальный числовой код объекта, через который к этому объекту можно обращаться. Команда gca в самом деле возвращает хэндл текущих координатных осей. Команда
>> h = get(gca, 'Children')
записывает в переменную h массив хэндлов – указателей на объекты линии. Для каждой линии можно установить толщину (в пунктах, по умолчанию – 0,5 пункта) .
>> set(h(1),'LineWidth',1.5)
>> set(h(2),'LineWidth',1.5)
Аналогично можно управлять и другими свойствами.
Цели работы
Освоение методов моделирования нелинейных систем в пакете Simulink
Задачи работы
-
научиться строить и редактировать модели с подсистемами -
научиться использовать нелинейные звенья типа «насыщение» -
научиться строить несколько графиков одновременно на одном осциллографе -
научиться составлять, редактировать и отлаживать скрипты -
научиться изменять свойства элементов графика (шрифт, толщину линии)
-
Описание системы
-
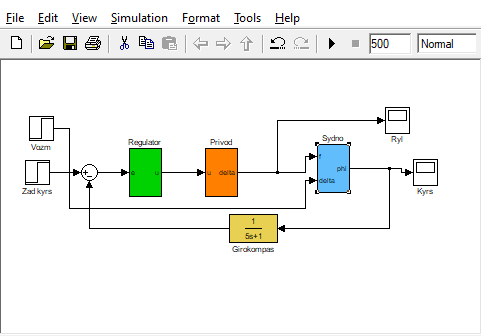
В работе рассматривается система управления судном по курсу. Ее структурная схема показана на рисунке. -
-
Структурная схема системы стабилизации судна на курсе -
Линейная математическая модель, описывающая рыскание судна, имеет вид -
-
где – угол рыскания (угол отклонения от заданного курса),
– угол рыскания (угол отклонения от заданного курса),  – угловая скорость вращения вокруг вертикальной оси,
– угловая скорость вращения вокруг вертикальной оси,  – угол поворота вертикального руля относительно положения равновесия,
– угол поворота вертикального руля относительно положения равновесия,  – постоянная времени,
– постоянная времени,  – постоянный коэффициент, имеющий размерность рад/сек. Передаточная функция от угла поворота руля к углу рыскания запишется в виде
– постоянный коэффициент, имеющий размерность рад/сек. Передаточная функция от угла поворота руля к углу рыскания запишется в виде -
 .
. -
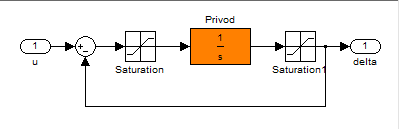
Линейная модель привода (рулевой машины) представляет собой интегрирующее звено с передаточной функцией -
 ,
, -
охваченное единичной отрицательной обратной связью. На угол перекладки руля и скорость перекладки накладываются нелинейные ограничения -
 ,
,  .
. -
Для измерения угла рыскания используется гирокомпас, математическая модель которого записывается в виде апериодического звена первого порядка с передаточной функцией -
 ,
, -
В качестве управляющего устройства используется ПИД-регулятор с передаточной функцией -
 , где
, где  сек и
сек и  сек.
сек.
-
Построение нелинейной модели
-
модель системы управления с выделенными подсистемами
-
нелинейная модель привода
-
нижний и верхний пределы насыщения
блок Saturation: от
 до
до 
блок Saturation1: от
 до
до 
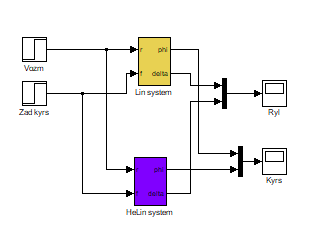
3) Сравнение линейной и нелинейной моделей
-
структурная схема системы для сравнения линейной и нелинейной моделей
-
скрипт для построения и оформления графиков
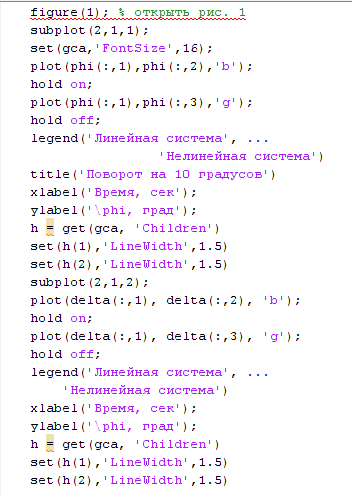
-
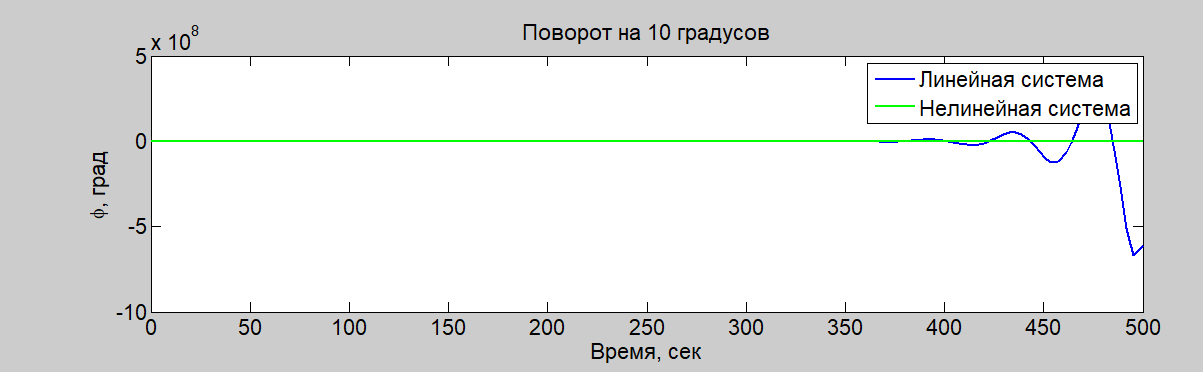
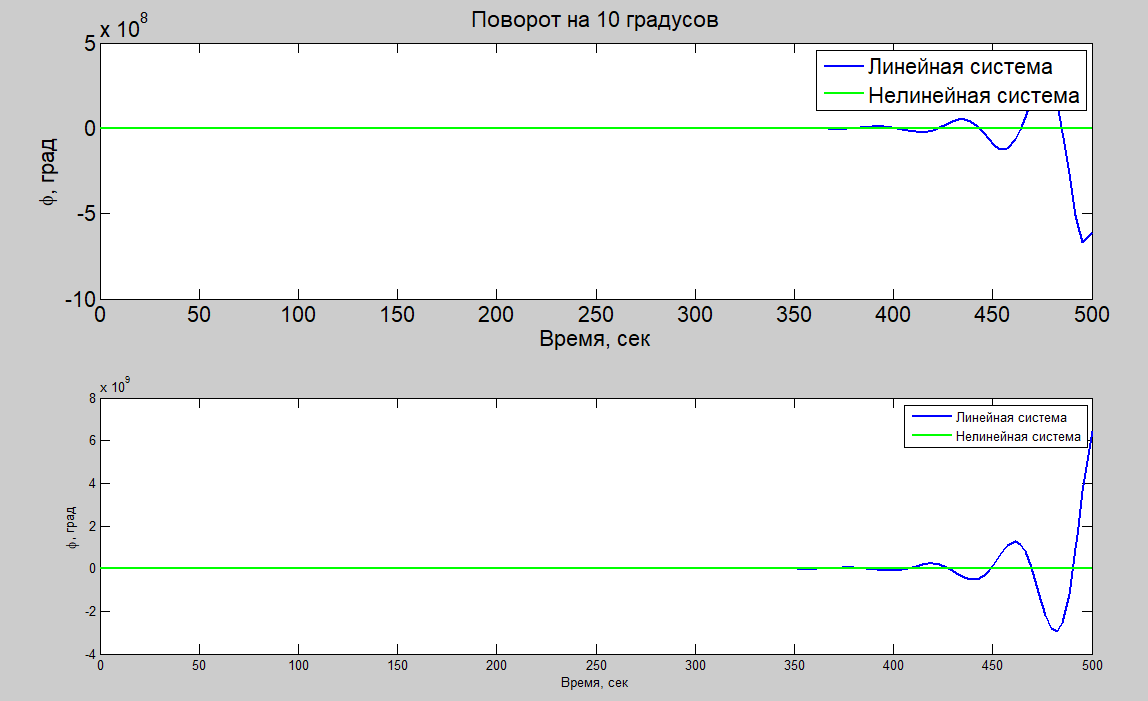
переходные процессы при изменении курса на 10 градусов
Вывод: в результате выполнения лабораторной работы освоены методы моделирования нелинейных систем в пакете Simulink.
Санкт-Петербург
2023