Файл: Задания по суммативному оцениванию за 3 четверть суммативное оценивание за раздел Робототехника.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.12.2023
Просмотров: 66
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ЗАДАНИЯ ПО СУММАТИВНОМУ ОЦЕНИВАНИЮ ЗА 3 ЧЕТВЕРТЬ
Суммативное оценивание за раздел «Робототехника»
| Цель обучения | 5.3.4.1 – формулировать определение робота; 5.3.4.2 – приводить примеры разновидностей роботов и области их применения. 5.3.4.4 – объяснять принцип работы гироскопического датчика. |
| Критерий оценивания | Обучающийся
|
| Уровень мыслительных навыков | Применение |
| Время выполнения | 20 минут |
| Задания | |
-
Дайте определение понятиям:
«Робот» ________________________________________________________________________________
_______________________________________________________________________________________
«Робототехника»________________________________________________________________________
_______________________________________________________________________________________
-
Напишите название роботов
Боевые роботы Бытовые роботы Промышленные роботы



Робот-учитель Медицинские роботы

-
… роботы, участвующие в промышленности для повышения производительности труда. -
… роботы – используются для выполнения хирургических операций и других медицинских услуг. -
… роботы – облегчают жизнь человеку и играют роль помощника по дому. -
… роботы предназначены для замены людей в труднодоступных и особо опасных боевых ситуациях. -
… роботы, могут читать вслух, общаться на разных языках и давать задания.
3. Установите соответствие между изображениями и названиями датчиков, между блоками программного кода и названиями датчиков.
 A 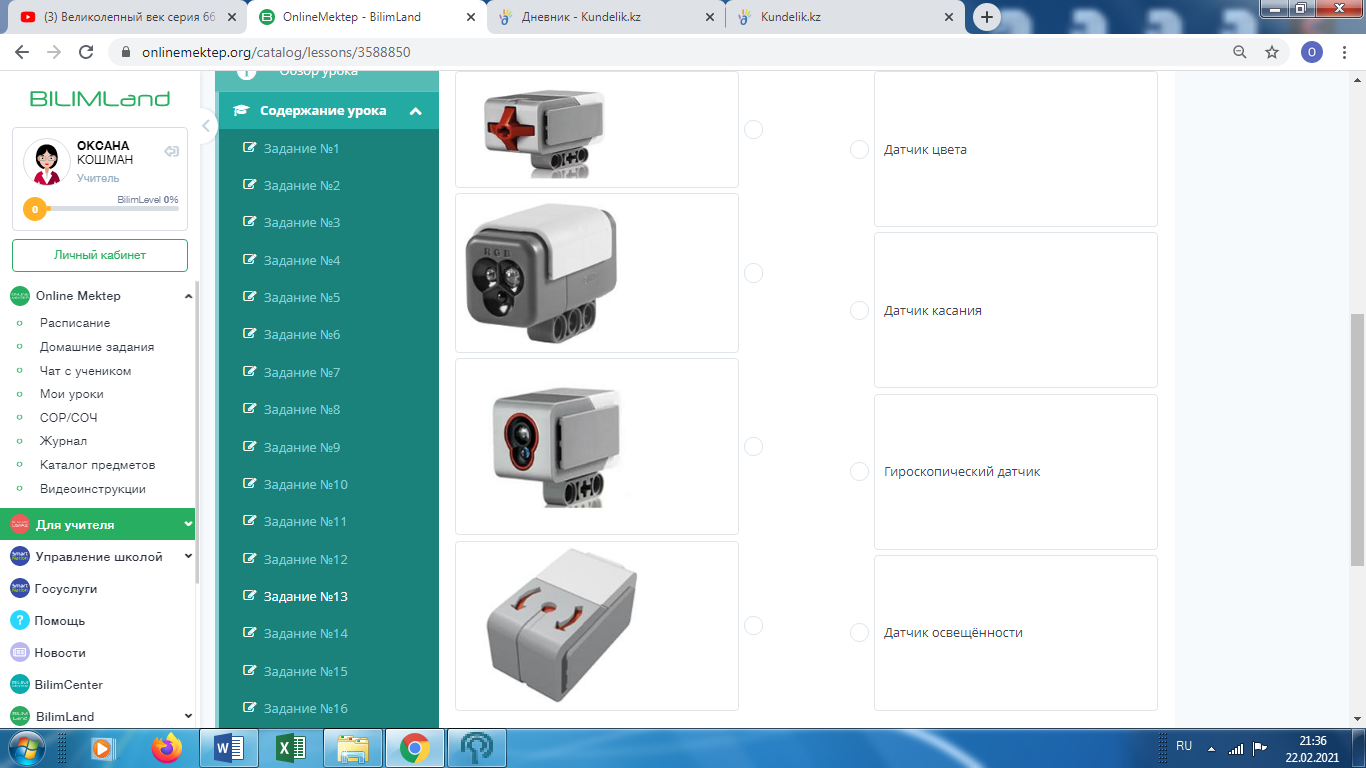 | | 1 Датчик цвета | F E |  |
| B  | 2 Датчик касания |  | ||
| C | 3 Гироскопический датчик | G  | ||
| D | 4 Ультразвуковой датчик | H  |
1 ________________
2 ________________
3 ________________
4 ________________
4. Выберите правильное назначение гироскопического датчика - ______________________________________
A. Предназначен для определения расстояния до объекта.
B. Предназначен для определения цвета.
C. Предназначен для измерения угла поворота или скорости вращения робота.
D. Предназначен для определения нажата клавиша или нет.
5. Определите порты к которым подключены гироскопические датчики (1, 2, 3, 4).
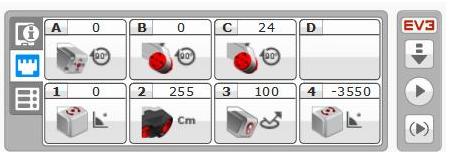
-
_________________________ -
_________________________
| Критерий оценивания | № задан ия | Дескриптор | Балл |
| Обучающийся | |||
| Формулирует определение «робот» и «робототехника» | 1 | знает определение «робот»; | 1 |
| знает определение «робототехника»; | 1 | ||
| Определяет разновидности роботов и области их применения | 2 | верно определяет боевых роботов; | 1 |
| верно определяет бытовых роботов; | 1 | ||
| верно определяет медицинских роботов; | 1 | ||
| верно определяет промышленных роботов; | 1 | ||
| верно определяет учителя-робота; | 1 | ||
| Определяет тип датчика по внешнему виду и форме и в программном коде | 3 | верно определяет датчик цвета; | 1 |
| верно определяет ультразвуковой датчик; | 1 | ||
| верно определяет датчик касания; | 1 | ||
| верно определяет гироскопический датчик; | 1 | ||
| Определяет предназначение гироскопического датчика, читает схемы подключения датчиков, знает их обозначения | 4 | Верно определяет предназначение гироскопического датчика | 1 |
| 5 | Верно определяет первый вариант № порта | 1 | |
| Верно определяет второй вариант № порта | 1 | ||
| Всего баллов: | | | 14 |