Файл: Агрегатирование систем из унифицированных модулей и компонентов (комплексных компонентов).docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.12.2023
Просмотров: 20
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Агрегатирование систем из унифицированных модулей и компонентов (комплексных компонентов).
Агрегатирование - принцип создания машин, приборов, оборудования из унифицированных стандартных агрегатов (автономных сборочных единиц), устанавливаемых в изделии в различном числе и комбинациях. Агрегаты должны обладать полной взаимозаменяемостью по всем эксплуатационным показателям и присоединительным размерам.
Общее
Продолжение
Этот принцип находит отражение в создании агрегатных роботов и комплексов различного технологического оборудования, скомпонованных из стандартных и унифицированных узлов, агрегатов и деталей, различное пространственное положение которых дает возможность их быстрой переналадки, т.е. обратимости и приспособляемости к новым или изменившимся условиям производства. Данное положение также применимо при создании агрегатных установок на базе оборудования различного технологического назначения для решения определенных задач роботизации производственных процессов (в данном случае составными частями агрегатной установки являются машины, а не узлы).

Продолжение
Продолжение

Продолжение
Построение системы агрегатно-модульной (САМ) ПР
Продолжение
Продолжение
Продолжение
4. Пример системы агрегатно-модульного построения промышленных роботов.

Система агрегатов и узлов промышленных роботов (схема принципиальная)
Используя основные принципы построения системы, изложенные в пункте 1 (Построение системы агрегатно-модульной (САМ) ПР), определив номенклатуру исполнительных механизмов (агрегатов 2-го уровня), проведя работу по их унификации и определив унифицированный типоразмерный ряд по грузоподъемности, необходимый для решения задач роботизации, строят систему агрегатов и узлов промышленных роботов (рис. 1).
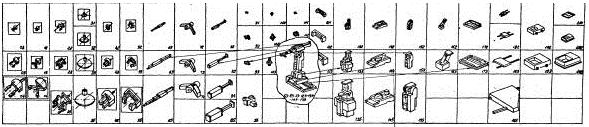
Рисунок 1 Система агрегатов и узлов промышленных роботов
По горизонтали в данной схеме располагается вся номенклатура исполнительных механизмов (агрегаты продольного и вертикального перемещения, агрегаты вращения и качания и др.), а также механизмы смещения и ротации кисти руки и захватные устройства (механические, магнитные, вакуумные) для объектов манипулирования различной конфигурации.
По вертикали расположены агрегаты и узлы различной грузоподъемности, соответствующей разработанному унифицированному типоразмерному ряду. В данном примере разбивка по грузоподъемности сделана в соответствии с ГОСТ Р 60.0.0.2-2016 «Роботы и робототехнические устройства. Классификация», где роботы разделены на следующие группы: сверхлегкие - до 1 кг, легкие - до 10 кг, средние - до 200 кг, тяжелые - до 100 кг, сверхтяжелые - свыше 1000 кг.
Каждой ячейке данной схемы присваивается трехзначный код. Первые два знака кода представляют собой порядковый номер ячейки по горизонтали (в нашем примере от 00 до 20); третий знак - номер строки по вертикали (от 1 до 5). Такое кодирование позволяет получить формулу обозначения любого агрегатного ПР. Например, ПР 062-082-092-132-172 - это агрегатный промышленный робот грузоподъемностью до 10 кг, работающий в прямоугольной системе координат с ротацией кисти.
1. Агрегатный промышленный робот - промышленный робот, исполнительное устройство которого изготовлено путем агрегатирования из деталей, узлов и агрегатов, входящих в унифицированный набор для построения определенных модификаций промышленных роботов.
2. Агрегатно-модульный промышленный
робот - агрегатный промышленный робот, в котором используются исполнительные модули.
3. Исполнительный модуль промышленного робота (ИМ) - агрегат, входящий в унифицированный набор или образуемый из деталей и узлов этого набора, способный самостоятельно выполнять функции реализации движений по одной или нескольким степеням подвижности промышленного робота.
Таким образом, с точки зрения инженерной системогенетики, агрегатирование - это совокупность приемов, позволяющих объединять функционально связанные составные части изделия в единые элементы (агрегаты), В результате агрегатирования происходит качественное изменение признаков отдельных составных частей. Степень уменьшения числа элементно-нового исполнения при агрегатировании оценивается коэффициентом агрегатирования:

где
 – число элементов в агрегатированном состоянии;
– число элементов в агрегатированном состоянии; – общее число элементов в исполнении.
– общее число элементов в исполнении.Выделение агрегатов выполняют на основе кинематического анализа машин и их составных частей с учетом применения их и в других машинах. При этом стремятся, чтобы из минимального числа типоразмеров автономных агрегатов можно было создать максимальное число компоновок оборудования.
Таким образом, агрегатирование это создание объектов на базе универсальных структурных составляющих. Агрегатирование является дальнейшим развитием метода унификации.
Большое распространение метод агрегатирования получил в станкостроении. Агрегатные станки при смене объекта производства можно легко разобрать и из тех же агрегатов собрать новые станки для обработки других деталей. Метод агрегативности получил дальнейшее развитие в станколиниях и в ГАП (гибких автоматизированных производствах).
Отечественный и зарубежный опыт показывает, что при частой сменяемости или модернизации изготовляемых изделий агрегатирование является наиболее прогрессивным методом конструирования. Принцип унификации и агрегатирования является обязательным при разработке стандартов на все новое оборудование.
Применительно к РЭС агрегатирование реализуется как функционально-узловой метод (ФУМ) проектирования РЭС из модулей, микросхем и других унифицированных функциональных узлов (УФУ). Ряды УФУ имеют строго стандартизованные электрические параметры и присоединительные размеры, что позволяет компоновать практически неограниченное число устройств.
Расширенное понятие модуля.
Следует отметить, что понятие модуль в различных отраслях промышленности получило несколько различные определения. Так, в станкостроении под модулем понимается переналаживаемый станок, оснащенный устройствами программного управления. Унифицированные модули в станкостроении предназначены как для автономной работы, так и для встраивания в систему более высокого ранга - гибкую переналаживаемую линию.
В общем понимании модуль понимается как понятие проектировочное. Например, модуль зубчатого зацепления в сочетании с принципом пропорциональности позволяет однозначно определять все геометрические размеры зубчатого зацепления и зуборезного инструмента.