Файл: Дисциплина Теория автоматического управления Курсовая работа система статического слежения за угловым перемещением.doc
Добавлен: 09.12.2023
Просмотров: 45
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра: Автоматика и управление в технических системах
Дисциплина: Теория автоматического управления
Курсовая работа
СИСТЕМА СТАТИЧЕСКОГО СЛЕЖЕНИЯ ЗА УГЛОВЫМ ПЕРЕМЕЩЕНИЕМ
Выполнил студент: III – ИТ – 4
Сидоров А. Д.
Вариант № 14
Проверила: Дилигенская А.Н.
Самара 2012
Содержание
1. Задание на курсовую работу 3
2. Исходные данные для выполнения курсовой работы 4
2.2 Исходные данные 4
2.3 Режимы работы по нагрузке 5
2.4 Параметры варианта 5
3. Расчетная часть 6
3.1 Преобразование структурной схемы 6
3.2 Определение статического коэффициента передачи Kгр 8
3.3 Переходный процесс системы до коррекции 8
3.4. Определение статической ошибки 10
3.5. Коррекция по ЛАЧХ эквивалентной разомкнутой структуры 10
3.6. Исследование параметров скорректированной системы 11
3.7. Функциональная и структурные схемы после коррекции 13
3.8. Сравнительная таблица показателей переходного процесса 13
4. Список использованных источников 14
1 Задание на курсовую работу
Главной задачей является устранение противоречия между требованиями к системе по устойчивости и требованиями по допустимой статической погрешности. Это достигается путем коррекции частотных характеристик разомкнутой системы. Основные этапы выполнения КР:
1. Составить структурную схему с входами по задающему воздействию φЗ основному возмущению МС и выходом по регулируемой координате φ.
2. Составить структурную схему с входом φ
З и выходом φ при МС = 0.
3. Составить структурную схему с входом МС и выходом φ, при φЗ =0.
4. Определить статический коэффициент передачи Kгр, обеспечивающий
устойчивость структуры и соответствующую ему статическую
погрешность в номинальном режиме (2,1.).
5. Построить переходные функции по φЗ при K = 0,9Kгр, указать прямые показатели качества этих характеристик.
6. Выбором K = KN и введением корректирующих звеньев обеспечить статическую погрешность в номинальном режиме ε ≤ 0,3εгр. Определить схему и выбрать параметры корректирующих звеньев.
7. Рассчитать и построить при K = KN переходную функцию по φЗ, указать ее показатели, в том числе запасы устойчивости по амплитуде и фазе.
8. Привести структурную и функциональную схемы после коррекции.
9. Привести сравнительную таблицу показателей переходного процесса до и после коррекции.
2 Исходные данные для выполнения курсовой работы
2.1 Исходные данные
Исходными материалами КР являются функциональная схема базовой САУ и математические модели звеньев соответствующей структурной (алгоритмической) схемы (Рис.1).
MC JН
φЗ Uя φ
—
Рисунок 1 – Функциональная схема САУ
Здесь:
ОУ – объект управления, состоящий из двигателя постоянного тока (ДПТ) с независимым возбуждением. Влияние собственно нагрузки Н отражается воздействием сопротивления МС и момента инерции JН нагрузки Н на валу двигателя; ИП – измерительный преобразователь; У – усилитель постоянного тока, φЗ – задаваемый угол, φ –обрабатываемый угол.
При выполнении курсовой работы используется схема замещения ДПТ (Рис.2), в которой учитывается как обратная связь по скорости Kω, так и возмущающее воздействие МС.

 МС
МСUя МВ — ω φ
—
Рисунок 2 – Схема замещения
2.2 Режимы работы по нагрузке
2.1 Номинальный режим: МCN = 0,15∙Мвр.max, JН = Jдв
2.2 Изменение момента инерции нагрузки, приведенное к валу двигателя
2.3 Изменение момента сопротивления, приведенное валу двигателя
2.3 Параметры варианта
3.1 Требуемые показатели переходной функции φ(t):
Перерегулирование σ ≤ 25,0%,
Длительность переходного процесса tП ≤ 1,5 с,
Ошибка в установившемся режиме εN ≤ 0,2 εгр, где εгр – статическая погрешность в номинальном режиме.
3.2 Параметры ДПТ:
Uя max = 24В,
Rя = 0,4 Ом,
Lя = 4∙10-3
KМ = 2∙10-3
Kω = 0,2 В∙С,
J∑=10-4
Здесь N=n1∙n2,
где n1 – номер в списке группы – 14,
n2 – номер группы – 1.
3.3 Усилитель У и измерительный преобразователь ИП пропорциональные безынерционные звенья.
3 Расчетная часть
3.1 Преобразование структурной схемы
Составим структурную схему с входами по задающему воздействию φЗ, основному возмущению МС и выходом по регулируемой координате φ. Для этого используем схему замещения ДПТ, приведенную на рисунке 2, так же воспользуемся тем, что ИП и У являются пропорциональными безынерционными звеньями с передаточными функциями WИП = G, WУ = KУ. Приняв значение G=1, звено ИП можно исключить из схемы. Данная схема приведена на рисунке 3:
МС
φЗ Uя МВ — ω φ
— —
Рисунок 3 – Структурная схема с входами по задающему воздействию φЗ, основному возмущению МС и выходом по регулируемой координате φ
Составим структурную схему с входом φЗ и выходом φ при МС = 0 (Рис.4):

φЗ Uя МВ ω φ









 — —
— —


Рисунок 4 - Структурная схема с входом φЗ и выходом φ при МС = 0
Составим структурную схему со входом по МС и выходом φ, при φЗ = 0. Для упрощения схемы некоторые звенья будут преобразованы, согласно их соединению, это отражено в передаточных функциях звеньев (Рис.5):
МС ω φ
—
Рисунок 5 - Структурная схема со входом по МС и выходом φ, при φЗ = 0
Передаточная этой системы:
 | (1) |
Преобразуем систему, представленную на рисунке 3, к схеме с единичной обратной связью вида (Рис. 6):
М
φЗ ε φ
—
Рисунок 6 – Схема с единичной обратной связью
Для преобразования схемы примем, что МС = 0. Запишем единую передаточную функцию всей системы:
| | (2) |
Упростим передаточную функцию, раскрыв скобки:
| | (3) |
3.2 Определение статического коэффициента передачи Kгр
Составим характеристическое уравнение замкнутой структуры и определим граничное значение коэффициента усилителя Kгр, такое что при KУ
Это удобно сделать с помощью критерия Гурвица. Характеристическое уравнение замкнутой системы будет иметь следующий вид:
| | (4) |
Составим матрицу Гурвица:
 | (5) |
Условие устойчивости по критерию Гурвица::
| | (6) |
Из этого неравенства найдем Kгр:
| | (7) |
Откуда:
| | (8) |
Дальнейший анализ системы до коррекции производится при KУ = 0,9Kгр.
3.3 Переходный процесс системы до коррекции
Построим переходную функцию при МС = 0, φЗ = const (Рис. 7):
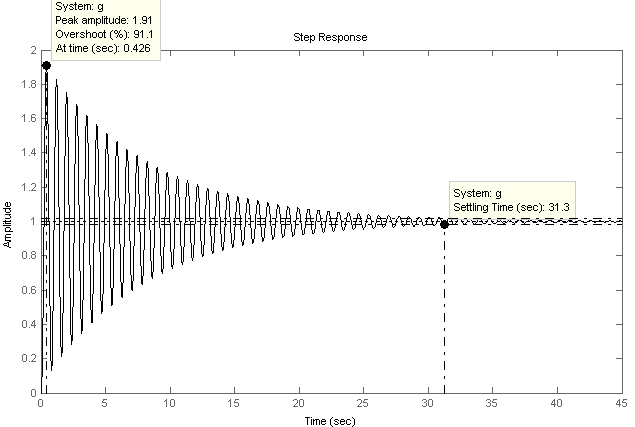
Рисунок 7 – Переходная функция при KУ = 0,9Kгр
Длительность переходного процесса: tП = 31,3 с;
Перерегулирование: σ% = 91,1%;
Количество перерегулирований: N = 40
Запас устойчивости исходной системы приведены на рисунке 8:
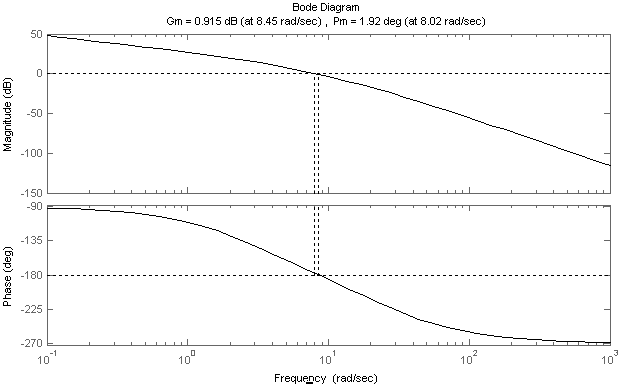
Рисунок 8 –ЛАЧХ и ЛФЧХ
3.4 Определение статической ошибки
Найдем ошибку в установившемся режиме. Воспользуемся тем, что[1]:
| | (9) |
Согласно номинальному режиму, МCN = 0,15∙Мвр.max
| | (10) |
С учетом φз = 1, составим выражение для φ:
| | (11) |
| | |
| | (12) |
Требуется εN ≤ 0,2εгр. Для этого:
 | (13) |
3.5 Коррекция по ЛАЧХ эквивалентной разомкнутой структуры
Найдем корректирующее звено. Для этого построим ЛАЧХ разомкнутой исходной системы и ЛАЧХ желаемой системы:
| | (14) |
Подставив значения, получим:
| | (15) |
Характеристическое уравнение разомкнутой системы:
| | (16) |
Сопрягающие частоты исходной системы: ω1 = 3с-1; ω2 = 23,7с-1.
Сопрягающая частота, желаемой системы определяется по формуле[1]:
| | (17) |
Где, tП – время переходного процесса. Согласно требованиям системы tП=1,5с;
b – коэффициент, связанный с перерегулированием σ. При σ = 25% b = 3;
тогда:
| | (18) |
Частота, ограничивающая со стороны высоких частот:
| | (19) |
Частота, ограничивающая со стороны низких частот:
| | (20) |
Построим ЛАЧХ исходной и желаемой систем (Рис.9):
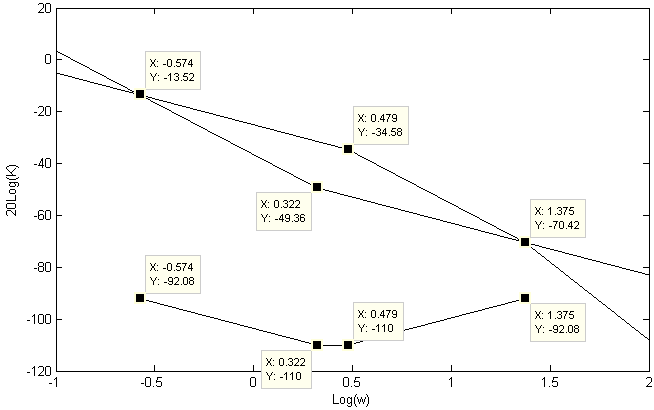
Рисунок 9 – ЛАЧХ
Передаточная функция корректирующего звена[2]:
| | (21) |
Где T1 = 0,476 c, T2 = 0, 332 c, T3 = 3,75 c, T4 = 0,042 c.
Подставив значения постоянных времени получим:
| | (22) |
3.6 Исследование параметров скорректированной системы
Переходная функция системы с корректирующим звеном приведена на рисунке 10:
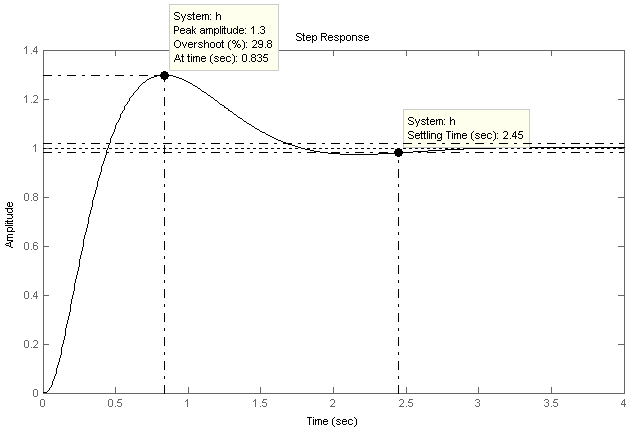
Рисунок 10 – Переходная характеристика скорректированной системы
Длительность переходного процесса: tП = 2,45 с
Перерегулирование: σ% = 29,8%
ЛАЧХ и ЛФЧХ скорректированной системы представлены на рисунке 11:
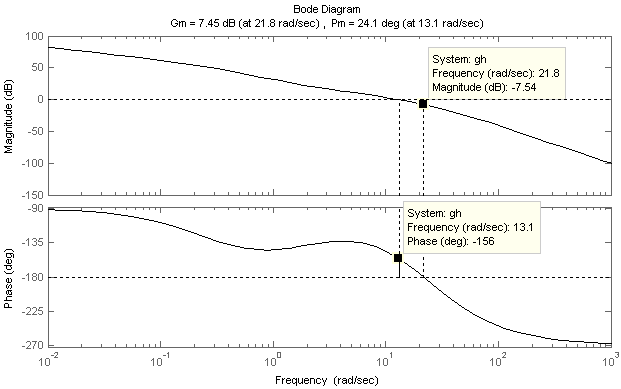
Рисунок 11 – ЛАЧХ и ЛФЧХ
3.7 Функциональная и структурные схемы после коррекции
Ф
 ункциональная схема скорректированной системы приведена на рисунке 12:
ункциональная схема скорректированной системы приведена на рисунке 12:MC JН
φЗ
—
Рисунок 12 – Функциональная схема скорректированной системы
С
 труктурная функция скорректированной системы приведена на рисунке 13:
труктурная функция скорректированной системы приведена на рисунке 13:—

— —
Рисунок 13 – Структурная схема скорректированной системы
3.8 Сравнительная таблица показателей переходного процесса
Показатели переходного процесса представлены в сравнительной таблице 1:
Таблица 1 – Показатели переходного процесса
| | До коррекции | После коррекции |
| Длительность переходного процесса, tП | 31,3 с | 2,45 с |
| Перерегулирование, σ% | 91,1% | 29,8% |
Требуемые показатели переходного процесса не были достигнуты ввиду исходных данных варианта. Показатели системы улучшились на следующие величины:
Длительность переходного процесса сократилась на 28,85 с.
Перерегулирование уменьшилось на 61,3%.
4 Список использованных источников
1. Методическое пособие по выполнению курсовой работы по курсу ТАУ: метод. пособ к курсовой работе – Самара: самар, техн, ун–т, 16 с.
2. Лысов В. Е. Теория автоматического управления: учебное пособие – Самара: самар, гос. техн, ун–т, 209. 454 с.