ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.12.2023
Просмотров: 44
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ПЕРВОЕ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧЕБНОЕ ЗАВЕДЕНИЕ РОССИИ

МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
федеральное государственное бюджетное образовательное учреждение
высшего образования
САНКТ-ПЕТЕРБУРГСКИЙ ГОРНЫЙ УНИВЕРСИТЕТ
Кафедра машиностроение
Расчетно-графическая работа 1.
По дисциплине Теория машин и механизмов.
(наименование учебной дисциплины согласно учебному плану)
Тема работы: Исследование плоского рычажного механизма
Выполнил: студент гр. ИТО-21 Трубчанинов Е.В
(шифр группы) (подпись) (Ф.И.О.)
Оценка:
Дата:
Проверил
руководитель работы: ассистент Плащинский В.А.
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2023
ВВЕДЕНИЕ
Кулисный механизм – рычажный механизм, преобразующий вращательное или качатаельное движение в возвратно – поступательное и наоборот. Данное устройство классифицируется на три типа: вращающийся тип, качающийся тип или движущийся прямолинейно. Основным преимуществом данного механизма является обеспечение довольно высокой скорости ползуна, которую он развивает при выполнении обратного хода. Данное преимущество привело к тому, что такое устройство стало очень широко использоваться в том оборудовании, которое имеет холостой обратный ход.
Движение механизмов зависит от их строения и сил, действующих на них. Поэтому удобно при анализе механизмов разбить работу на две части:
-структурный и кинематический анализ;
-кинетостатический анализ механизмов.
Структурный и кинематический анализы механизмов сводятся к изучению теории строения механизмов, исследования движения тел, их образующих, с геометрической точки зрения, независимо от сил, вызывающих движение.
Исходные данные
В данном расчетно-графическом задании проводится кинематическое исследование механизма перемещения долбяка. Исследуемый механизм изображен на рис.1. Исходные данные представлены в таблице 1.
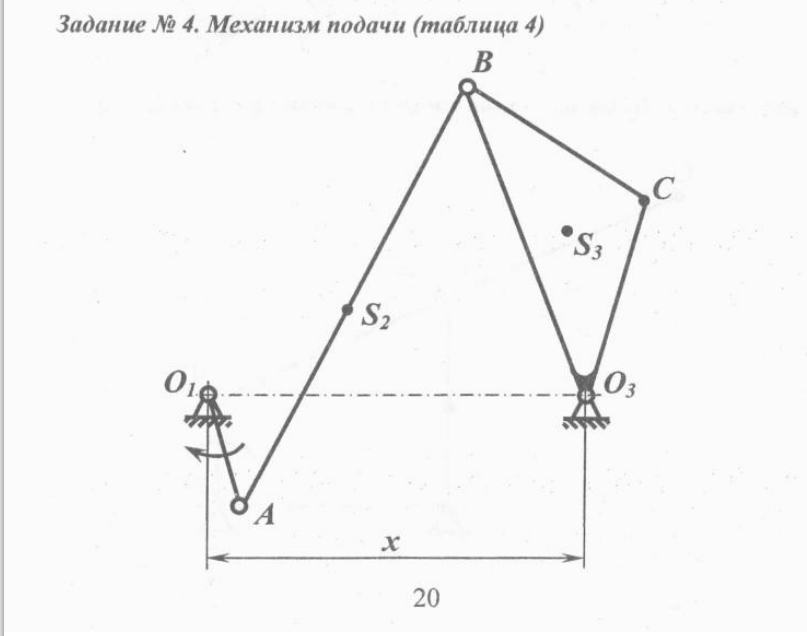
Рисунок 1 – Механизм подачи.
Таблица 1 – Исходные данные
| Параметр | Размерность | Вариант 2 |
| O1A | м | 0,08 |
 B B | м | 0,16 |
| BC | м | 0,095 |
| X(О1О3) | м | 0,384 |
| AB | м | 0,32 |
| О3С | м | 0,095 |
| n | мин-1 | 175 |
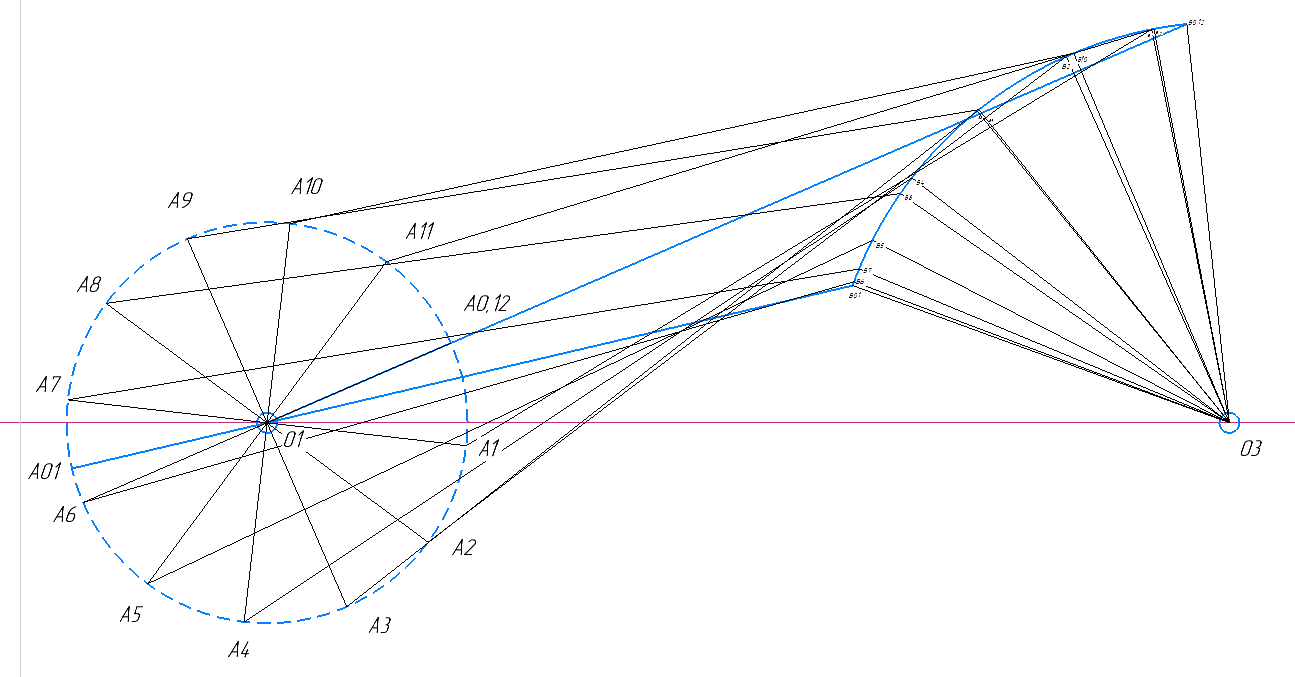
1. План положений механизма
Построим план положений механизма для одного цикла его движения. Под циклом для заданного механизма принимается полный оборот кривошипа.
Для построения принимаем масштабный коэффициент длины µl=0.004м/мм.
Далее переводим все геометрические линейные размеры в масштабный коэффициент длин и получаем величины отрезков, изображающие заданные геометрические параметры в составе соответствующей кинематической схемы:

Используя полученные величины отрезков геометрических параметров механизма, методом засечек, строим его кинематическую схему.
Для этого на плоскости произвольно выбираем точку
 (центр вращения кривошипа)
(центр вращения кривошипа) и через нее проводим окружность радиусом 20 мм.
и через нее проводим окружность радиусом 20 мм. Далее от
откладываем горизонтальную линию размером 96 мм и получаем точку . Из точки также проводим окружность радиусом 40 мм – это и будет траектория движения точки В.Сначала определяем крайние положения. Крайнее левое положение будет при O1A+ AB. А крайнее правое положение при AB-O1A. Потом определяем рабочий ход механизма. У меня это с правого крайнего положения по левое крайнее положение. Откладываем от начала рабочего хода 12 равных секторов, чтобы построить все положения вместе с холостым и рабочим ходом. И получаем план положений:
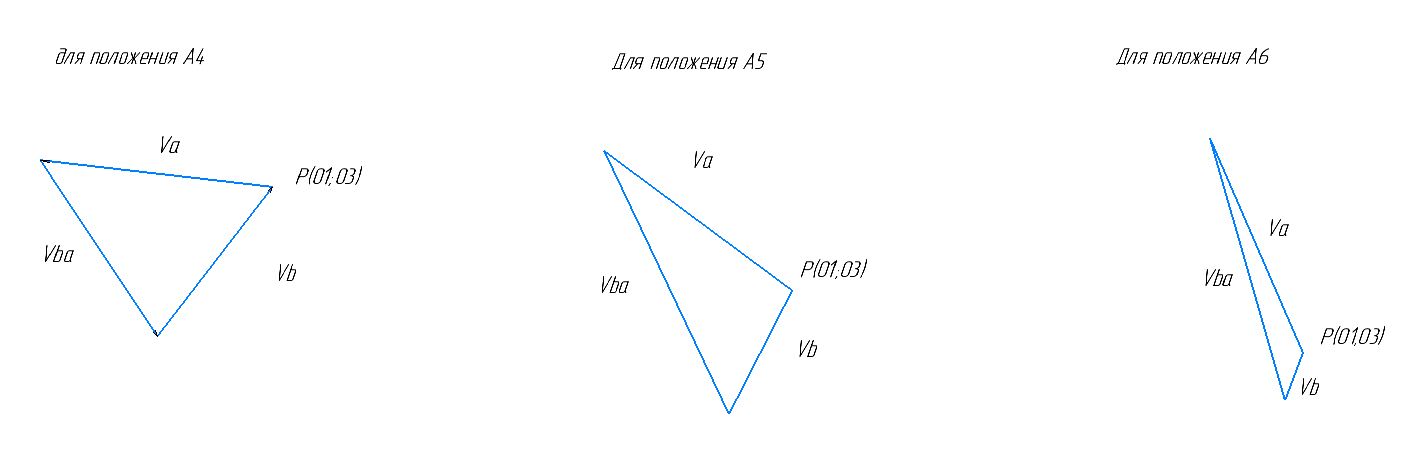
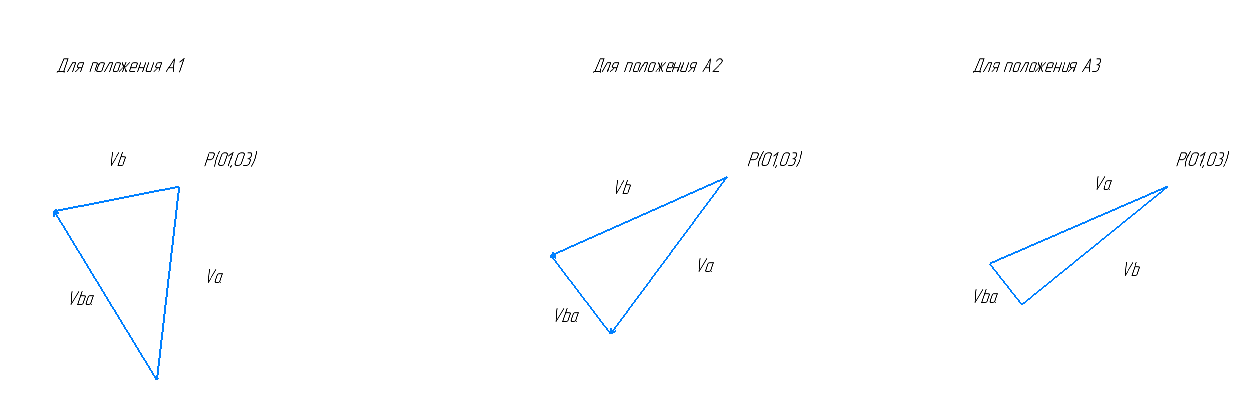
3. План скоростей
Для определения скоростей механизма воспользуемся методом построения плана скоростей. Метод заключается в построении векторов скоростей точек данного механизма в полярной системе координат с центром в точке p(полюс).
Рассмотрим последовательность построения плана скоростей на примере Положения 1.
Так как угловая скорость ведущего звена постоянна (
 ), то по заданной частоте вращения кривошипа определяем её величину:
), то по заданной частоте вращения кривошипа определяем её величину:
Зная величину
 определяем модуль скорости точки A и С:
определяем модуль скорости точки A и С:
Масштабный коэффициент плана скоростей
Запишем векторные уравнения распределения скоростей, последовательно решая которые построим план скоростей.
Скорость точки B определяем с системы уравнений:
Решим систему графически. Для этого из полюса проводим вектор перпендикулярно к звену АО1, из начала этого вектора проводим прямую, перпендикулярную АВ, а из начала полиса проводим прямую, перпендикулярную ВО3. Эти две прямые пересекаются, мы получаем искомые вектора.
Определяем скорости для положения 1:


.
Аналогично находим скорости и для других положений. Полученные данные приведены в таблице 1.
Таблица 1 – Величины скоростей
| № положения | 1 | 2 | 3 | 4 | 5 | 6 |
 | 1,46 | 1,46 | 1,46 | 1,46 | 1,46 | 1,46 |
 | 1,42 | 0,7 | 0,375 | 1,266 | 1,74 | 1,63 |
 | 0,91 | 1,38 | 1,354 | 1,13 | 0,83 | 0,3 |
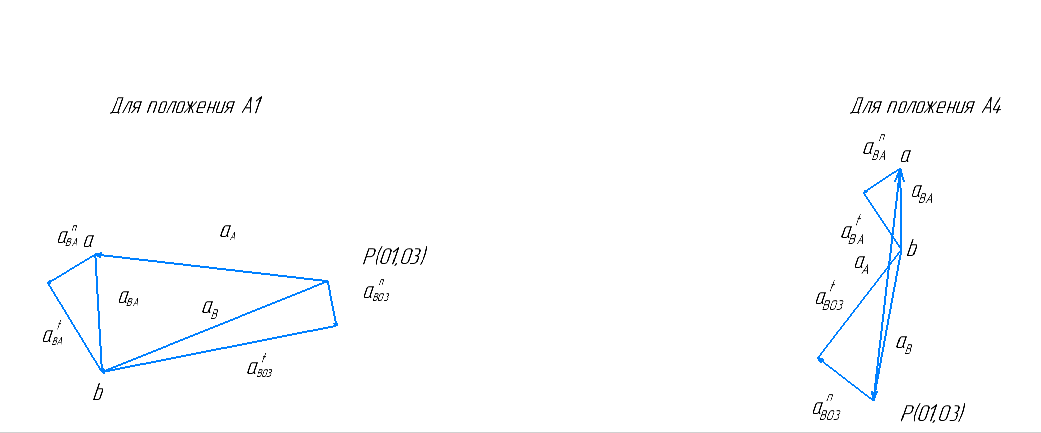
4. План ускорений
Ускорение точки A определяем с уравнения:

где аO – ускорении точки O=0, так как она неподвижна;
 нормальное ускорение точки A. Его величина:
нормальное ускорение точки A. Его величина:
Масштабный коэффициент плана ускорений равен:
где paa – произвольно выбранный отрезок, изображающий на плане ускорений модуль вектора нормального ускорения
 кривошипа.
кривошипа.На произвольном месте ставим точку πa – полюс. Так как точка О1 являются неподвижной, то на плане ускорений она будут совпадать с полюсом плана. Далее из точки pa проводим линию параллельную кривошипу АO1 в сторону центра его вращения (от точки А к точке О1 на плане положения) и откладываем на ней расстояние paа, ставим точку а.
У звеньев, совершающих вращательные движения, кроме нормальных ускорений
 (центростремительных), присутствуют и тангенциальные
(центростремительных), присутствуют и тангенциальные  (касательные). При этом вектор всегда направлен вдоль оси звена к центру его вращения, а вектор направлен перпендикулярно оси звена (по касательной к окружности вращения).
(касательные). При этом вектор всегда направлен вдоль оси звена к центру его вращения, а вектор направлен перпендикулярно оси звена (по касательной к окружности вращения).Ускорение точки В определяем с системы уравнений:
Величина ускорения равна
Определяем длины векторов ускорений
Графически решаем данную систему и определяем ускорения. Для этого из точки a проводим параллельную прямую отрезку ba, заданной величины, это будет вектор нормального ускорения ba. Из полюса проводим также параллельную прямую нужного направления, заданной величины, и получаем искомый вектор нормального ускорения bo3. Дальше из концов этих двух векторов проводим перпендикулярные линии, которые пересекутся в точке b. Потом из полюса до точки b мы соединяем вектор, и также делаем из точки a до точки b. Тем самым находим искомые ускорения aBA и aB. Ускорения равны:


Записываем данные в таблицу 2.
Таблица 2 – Величины ускорений
| № положения | 1 | 4 |
 | 26,82 | 26,82 |
 | 13,4 | 9,24 |
 | 6,3 | 5 |
 | 11,83 | 7,77 |
 | 27,67 | 17,48 |
 | 5,17 | 7,98 |
 | 27,18 | 15,55 |
Вывод: В данной работе мы научились строить план положений механизма, план скоростей и их ускорений, а также высчитывать все эти значения.