Добавлен: 12.12.2023
Просмотров: 156
Скачиваний: 14
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Современный мир вполне осознает, какое значение имеет робототехника. Конечно, до появления роботов, способных свободно общаться со своими владельцами, еще далеко, но уже появились такие, которые могут выполнять определенные виды работ. Искусственный интеллект появился в роботах-пылесосах, самоочищающихся кошачьих туалетах. Многие наверняка слышали о 3D-печатном роботе, который самостоятельно собирает себя, когда его детали нагреты до определенных температур. Несмотря на то, что пользовательские роботы еще не очень распространены, само появление подобных устройств доказывает, что у людей есть желание создавать подобные инновации.
Роботов можно программировать, и не только на выполнение тех задач, которые человеку не нравятся, но и тех, которые ему просто не под силу. Именно по этой причине в самое ближайшее время развитие робототехники возможно в медицинской сфере. Немецкие ученые работают над созданием нанотехнологий с роботизированными интегрированными элементами. Эти миниатюрные роботы могут быть запрограммированы на перемещение глазной или кровяной жидкости, восстановление повреждений клеток человеческого тела, доставку лекарств. Кроме того, роботы могут заменить людей в инфекционной среде, что особенно актуально в условиях развития различных эпидемий.
В настоящее время развитие робототехники достигло такого уровня, что роботы могут не только перемещаться самостоятельно, но и переносить грузы, играть на музыкальных инструментах, подниматься по лестницам, принимать участие в спасении людей при чрезвычайных ситуациях, изображать домашних животных, и даже успели побывать в космосе.
В некоторых странах развитие робототехники происходит в ограниченном направлении. Ярким примером может служить Россия, где развивается только военная робототехника, как ответ на американскую программу роботизации армии. Если говорить о гражданской робототехнике, то здесь насчитывается всего около полусотни компаний, которые занимаются разработками подобного рода. В США же эта цифра в десятки раз больше.
В то же время, можно говорить о том, что во всем мире ускорился рост так называемого роботолюбительства. Все больше школьников и студентов увлекается работой с моделями роботов и различными коптерами.
Сейчас робототехника постепенно становится тем общим двигателем, который объединяет электротехнику, электронику, оптику, механику. Развитие данной науки дает возможность решать разного рода социальные проблемы, в частности, совершать уход за престарелыми людьми, снизить человеческие потери в военных конфликтах, ограничить миграцию низкоквалифицированной рабочей силы.
Но чтобы данная наука и дальше развивалась, необходима правильная постановка целей: наращивание производства роботов и упрощение их применения. Данные цели возможно решить с помощью повышения показателя интеллектуальности роботов.
А робототехника будущего в настоящее время представляется как гармоничное соединение интеллектуальных и программных роботов, которые могли бы обеспечить удовлетворение нужд общества. Впрочем, делать какие-либо прогнозы относительно развития робототехники, искусственного интеллекта на длительный период в настоящее время не представляется возможным. Хотя… можно предположить, что может появиться и массово внедряться роботизированный транспорт, без человека-водителя. В настоящее время данный процесс идет не так быстро, как хотелось бы. Вполне возможно, что в ближайшие десятилетия беспилотная авиация продолжит вытеснять летчиков, а соотношение роботизированных летательных аппаратов будет равно примерно 80 к 20 процентам в пользу беспилотников. Кроме того, возможно нарастание замены военнослужащих роботами в общем в вооруженных силах.
В силу бурного развития робототехники появляются новые виды роботов, их количество возрастает, но в будущем может произойти их универсализация, и число роботов постепенно сократится, поскольку один и тот же робот сможет выполнять различные задачи.
Может сформироваться стойкий рынок сервисных роботов, в частности, домашних, которые будут охранять и убирать жилище, присматривать за детьми, готовить еду и организовывать досуг людей. Могут появиться также роботы-сиделки, обучающие роботы. Уже сейчас существует немало перспективных разработок, поэтому в будущем они могут быть воплощены в жизнь. Таким образом, со временем практически каждая семья сможет обзавестись роботом того или иного типа.
2.2.Как создаются роботы?
Существует много разных типов роботов, но каждый использует одни и те же фундаментальные элементы. Основные части каждого робота - это механика, электроника и программирование. Создатели должны определить цель роботизированного проекта и объединить компоненты из этих основных категорий, чтобы завершить сборку.
Начинающим робототехникам обычно не нужны сложные комплекты или большие суммы денег, чтобы сделать своего первого робота, так как простой автономный роботизированный проект может быть выполнен за небольшие средства. Новички должны выбрать проект, который не является чрезмерно амбициозным или продвинутым. Многие простые роботы предназначены для передвижения по комнате, в то время как другие запрограммированы на поиск солнечного света.
Простая цель позволяет сосредоточиться на одной конкретной цели для роботизированного проекта и её достижения.
Механика робота должна быть построена с учетом конкретной цели.
Роботизированная рама необходима и должна быть большой и достаточно прочной, чтобы поддерживать критические компоненты робота. Колеса должны выбираться на основе предполагаемой поверхности. Робот, который будет использоваться на открытом воздухе, должен иметь большие колеса с протектором, а колеса для других роботов обычно могут быть меньше и легче.
Также следует выбирать систему колес, которую легко контролировать. Например, робот с двумя колесами намного проще строить и контролировать, чем проект с четырьмя колесами. Двухколесные роботы не требуют рулевых механизмов, но могут управляться остановкой или реверсированием одного из колес.
Необходимый массив электронных деталей может показаться пугающим и сложным для любителей, работающих над созданием робота. Однако, как и в случае с оборудованием, робототехническая электроника не должна быть чрезмерно сложной, и простота часто является преимуществом. Минимальные электронные компоненты, необходимые для роботизированного проекта, включают в себя двигатели, батареи, датчики и микроконтроллер.
Двигатели для роботов почти всегда имеют тип постоянного тока (DC). Они должны быть связаны непосредственно с колесами или соединены с приводными валами с помощью зубчатых колес. У роботов с двумя колесами часто также есть два двигателя. Включение обоих двигателей приводит робот в движение, остановка левого или правого двигателя заставляет робота поворачиваться в этом направлении.
Батареи обычно используются для подачи питания на электронные компоненты. Робототехники, которые создают роботов, должны выбирать легкие батареи, но при этом обеспечивающие достаточную мощность. Чаще рекомендуются аккумуляторные батареи. Обычные щелочные батареи, например, находящиеся в фонарях, часто слишком тяжелы и дороги для постоянной замены.
Для большинства роботов требуется микроконтроллер. Это простые платы, который действует как мозг робота. Микроконтроллеры содержат программы или набор инструкций. Большинство программ микроконтроллеров можно легко обновить с помощью компьютера.
Обычно датчики должны обеспечивать взаимодействие робота с окружающей средой. Они связаны непосредственно с микроконтроллером. Роботостроители должны выбирать датчики, соответствующие конкретным целям проекта. Например, роботу, ищущему солнечный свет, может понадобиться фотодатчик для определения уровня освещенности. Более сложные роботизированные проекты часто используют ультразвуковые и инфракрасные датчики для определения расстояний между объектами и предотвращения столкновения с препятствиями.
Глава III.Практическая часть.
3.1.Этап подготовки.
Для создания робота-погрузчика, мне понадобится конструкторSpike Prime, а для написания программы приложение
3.2.Ход работы.
В ходе моей работы мне придется создать робота-погрузчика. Я буду работать по плану:
| № | Технология выполнения | Фото |
| 1 | Я подготовил мотор и крепление для корпуса будущего погрузчика. | 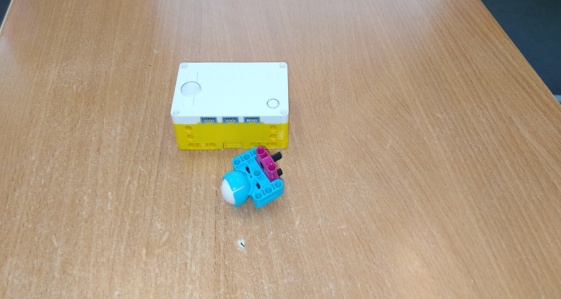 |
| 2 | Дальше я установил и закрепил механизмы которые, будут приводить в движение колеса и датчик света. | 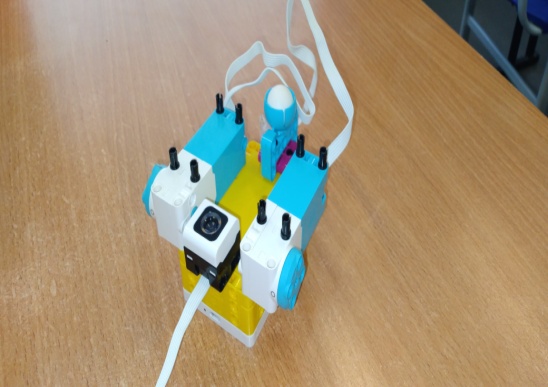 |
| 3 | Установил колеса и дополнительный механизм. | 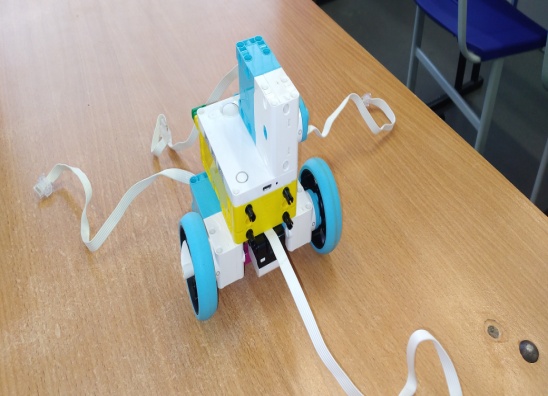 |
| 4 | В следующем шаге установил раму, на которой будут крепиться вилы и колесо, которое будет отвечать за поднятие и опускание вил. | 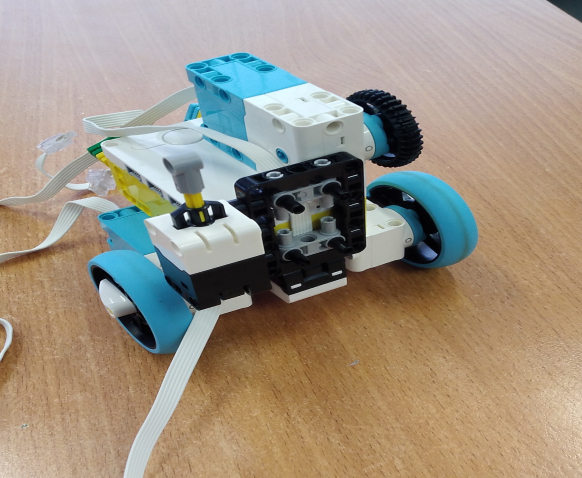 |
| 5 | Собрал вилы и установил их, а также собрал грузик и платформу для него. | 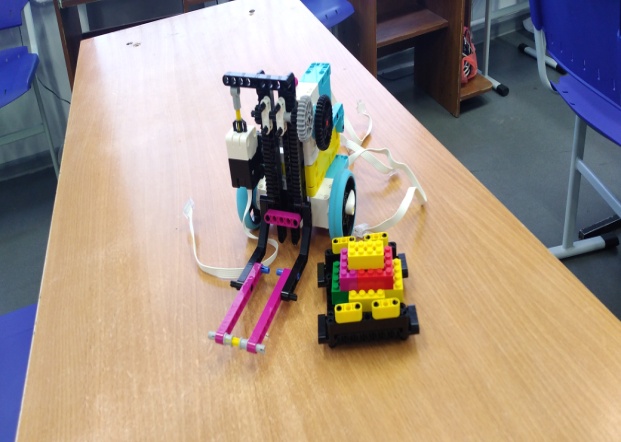 |
| 6 | После сборки робота, я принялся за написание программы, для его функционирования. | 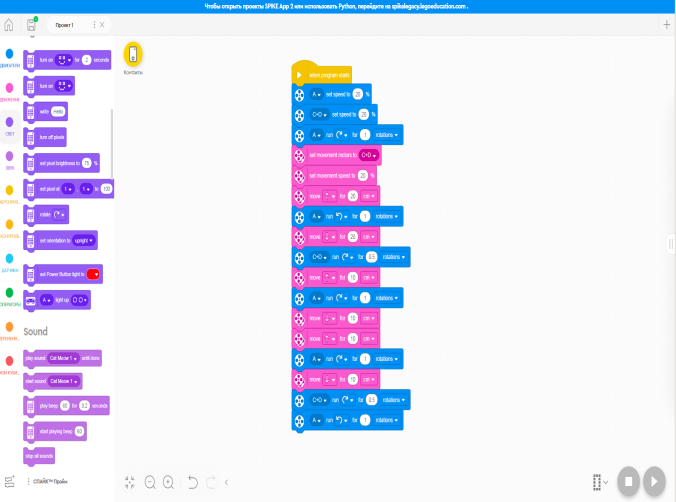 |
3.3.Плюсы и минусы.
Плюсы:
Компактность объекта .
Маленькое потребление энергии.
Удобно использовать, прост в освоении.
Помощь человеку в труднодоступных местах.
Минусы:
Хрупкость объекта.
Собирать приходиться из специального конструктора.
Сама сборка отнимает много времени.
Заключение.
Данное исследование помогло ближе познакомиться с такой наукой, как робототехника. Узнать какие виды роботов существуют и как они помогают и используются человеком в современном. Какие дальнейшие перспективы развития робототехники, а также сложно ли собрать робота самому.
Список используемых источников.
-
https://tainy.net/53508-razvitie-sovremennoj-robototexniki.html -
https://hi-news.ru/technology/istoriya-robototexniki-kak-vyglyadeli-samye-pervye-roboty.html -
https://sitekid.ru/izobreteniya_i_tehnika/roboty/istoriya_robototehniki.html -
https://mentamore.com/robototexnika/perspektivy-razvitiya-robototexniki.html -
https://prof-itgroup.ru/media-center/blog/perspektivy-razvitiya-robototekhniki-v-rossii/ -
https://robotportal.ru/zanimatelnaya-robototehnika/vidy-robotov