Файл: Курсты жмыс ПніБасару жйелеріндегі компьютерлік желілер Таырыбы Резервуарлар каскадыны динамикасы мселесін зерттеу Мамандыы 6B17108 Автоматтандыру жне басару Орындаан Советов Жандос Тобы аисук204 Тексерген профессор Ибраева Л..docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 39
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Коммерциялық емес акционерлік қоғам
«Ғұмарбек Дәукеев атындағы АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ»
«Автоматтандыру және басқару» кафедрасы
Курстық жұмыс
Пәні:« Басқару жүйелеріндегі компьютерлік желілер»
Тақырыбы: «Резервуарлар каскадының динамикасы мәселесін зерттеу»
Мамандығы: 6B17108 – «Автоматтандыру және басқару»
Орындаған: Советов Жандос
Тобы: АИСУк-20-4
Тексерген: профессор Ибраева Л.К.
_____________ _____________ «___» ____________ 2022 ж.
(бағасы) (қолы)
Алматы, 2023
Мазмұны
1 Кіріспе 3
2 Курстық жұмысқа тапсырма 4
3 Негізгі бөлім 4
3.1 Зерттеу обьектісінің сипаттамасы 4
3.2 Жүйенің жұмыс алгоритмі 6
3.3 Модельдің блок – диаграммасы 6
3.4 Контроллердің блок – диаграммасы 11
3.5 Модельдегі имитациялық тәжірибе 11
4 Қорытынды 16
5 Әдебиеттер тізімі 17
Кіріспе
Курстық жұмыс резервуарлар каскадының динамикасының міндетін зерттейді, яғни модельдеудің аналитикалық әдісі арқылы дифференциалдық теңдеулер жүйесі түрінде математикалық модель алу. MATLAB-тың динамикалық жүйелерді модельдеу пакеті және stateflow оқиғаға негізделген жүйелерді жобалау пакеті сияқты мүмкіндіктері не үшін қолданылады.
Simulink модельдеудің ең көп уақытты қажет ететін кезеңін автоматтандырады: ол пайдаланушы жасаған виртуалды құрылғының мінез-құлқын ыңғайлы және визуалды визуалды бақылауды қамтамасыз ете отырып, берілген функционалды схеманы (модельді) сипаттайтын алгебралық және дифференциалдық теңдеулердің күрделі жүйелерін құрастырады және шешеді. Пакеттің маңызды артықшылығы-ерікті математикалық өрнектер блоктарында жұмыс істеу мүмкіндігі. Simulink ортасына ең маңызды толықтырулардың бірі-stateflow оқиғаға негізделген жүйелерді жобалау пакеті. Stateflow-күрделі басқару жүйелерін жобалауға арналған графикалық құрал. Бұл оқиғаға негізделген күрделі жүйелердің мінез-құлқын модельдеуге мүмкіндік береді.
Курстық жұмысқа тапсырма
1 Зерттеу обьектімен танысу. Обьекттің математикалық моделінің теңдеулерін дәлелдеу.
2 Математикалық модельдің кіріс және шығыс айнымалыларының тізімін анықтаңыз. Нысан жұмысының егжей-тегжейлі алгоритмін жасаңыз.
3 Қарастырылып отырған динамикалық жүйенің әрекетін зерттеу үшін MatLab жүйесінің Simulink пакетін пайдаланыңыз. Жүйенің логикасына сәйкес Simulink пакетінде модельдің блок-диаграммасын жинаңыз.
4 Stateflow басқару жүйелерін жобалау үшін графикалық құралдарды пайдаланып, нысанды басқаруды модельдеуді жүргізіңіз.
5 Қарастырылып отырған жүйенің мінез-құлқын зерттеу үшін имитациялық эксперименттер жүргізу (объектінің параметрлері опция бойынша таңдалады).
Негізгі бөлігі
Зерттеу объектісінің сипаттамасы
Зерттелетін жүйе-бұл екі цилиндрлік резервуар, олар әр түрлі биіктікте тігінен орналасқан, бірінші резервуардың түбі екіншісінің түбінен H=0,48 м қашықтықта орналасқан (1-сурет). Цистерналардың биіктігі бірдей h=1,225 м және әртүрлі диаметрлері бар: біріншісі-D1=14.7 см, екіншісі-D2 = 6.125 см. жүйеде бірінші резервуарда оның түбінен h қашықтықта орналасқан кіріс құбыры бар. Резервуарлар бірінші резервуардың Шығыс құбыры (және оның түбінде орналасқан) және екінші резервуардың кіріс құбыры (оның түбінен Н қашықтықта орналасқан) арқылы қосылады.
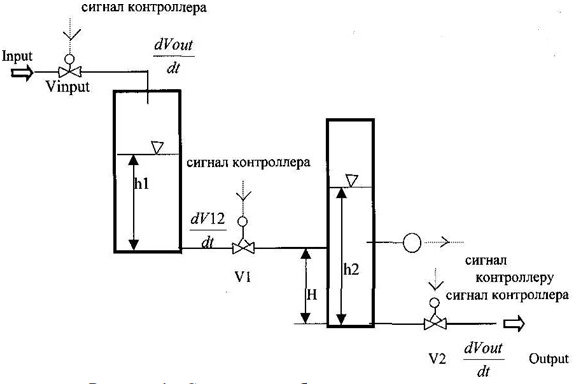
Cурет 1 – екі бак жүйесі.
Сондай-ақ, жүйеде екінші резервуардың түбінде орналасқан Шығыс құбыры бар. Жүйенің кіріс құбыры Vinput кіріс кранымен жабдықталған, ол бірден ашылады және судың кіріс ағынының жылдамдығы (л/сағ)ретінде анықталады
 (1)
(1)V1 және V2 крандары баяу құрылғылар болып табылады, олар бірдей тұрақты жылдамдықпен ашылады және жабылады, осылайша ашылу (жабылу) басталғаннан бастап толық ашылуға (жабылуға) дейін 80 с қажет. олардың ашылуы мен жабылуы клапанмен басқарылады, оның орнын Р = 0 мәнінен өзгертеді(шартты бірліктердегі толық жабылу) R=80 дейін (толық ашу).
Vinput, V1 және V2 крандарының ашылуын / жабылуын басқару арнайы контроллермен жүзеге асырылады.
Егер A1 және A2 арқылы цистерналар негіздерінің аудандарын белгілесеңіз, онда h1 және h2 банктеріндегі су деңгейлеріне арналған теңдеулер жүйесі келесідей жазылады
 (2)
(2)мұндағы
 -резервуарлар арасындағы құбыр арқылы судың ағу жылдамдығы, ал
-резервуарлар арасындағы құбыр арқылы судың ағу жылдамдығы, ал -жүйеден судың ағу жылдамдығы. Резервуарлар арасындағы су ағынының жылдамдығы H1 және H2 су деңгейлеріне, h мәніне және v1 кранындағы P1 кідіріс жағдайына байланысты
-жүйеден судың ағу жылдамдығы. Резервуарлар арасындағы су ағынының жылдамдығы H1 және H2 су деңгейлеріне, h мәніне және v1 кранындағы P1 кідіріс жағдайына байланысты (3)
(3)Жүйеден судың ағу жылдамдығы екінші P2 резервуарындағы су деңгейіне және V2 экранындағы P2 клапанының орналасуына байланысты
Крандардың жеке қасиеттері келесі функциялармен анықталады
 (4)
(4)Модельдің негізгі теңдеулері (2) теңдеулер болып табылады. Модельдің Шығыс айнымалылары-h1 және h2.
Vinput, V1, V2 мәндері туралы сигналдар Контроллерден беріледі. Бұл айнымалылар модельдің кірістері болып табылады.
Жүйенің жұмыс алгоритмі
Бастапқы күйінде барлық крандар жабық және екі резервуар да бос. Резервуарларды толтыру процесінде екінші резервуардағы су деңгейі келесі талапты қанағаттандыруы керек: ол белгіленген Lmin деңгейінен төмен түспеуі керек және алдын ала белгіленген L_plus деңгейінен асып кетпеуі керек.
Бастапқы сәтте контроллер vinput кіріс кранына сигнал жібереді, ол бірден ашылады және уақыт ішінде Time1 [c] тек бірінші резервуарды толтырады.
Уақыт өткеннен кейін Time1 контроллер v1 шүмегін ашу пәрменін жібереді және су екінші резервуарға түсе бастайды. Екінші күй Time2[с] бойы сақталады.
Уақыт өткеннен кейін Time2 v2 кранының орнын басқара бастайды. Атап айтқанда, егер контроллер екінші резервуардағы су деңгейі L_min[м] мәнінен төмен түскенін анықтаса, екінші резервуардағы су L_plus[м] деңгейінен жоғары болса, Шығыс кранды жабу пәрмені келеді - Шығыс кранды ашу пәрмені беріледі.
Резервуарлардың біреуі толып кететін немесе шығатын Кранның мезгіл-мезгіл ашылуы мен жабылуы болатын жағдайлар төтенше жағдай болып саналады.
Жүйенің қалыпты режимі барлық крандар ашылып, су жүйе арқылы тұрақты жылдамдықпен ағып жатқан күй болып саналады.
Vinput, V1, V2 мәндері туралы сигналдар Контроллерден беріледі. Бұл айнымалылар модельдің кірістері болып табылады.
Модельдің Блок-диаграммасы
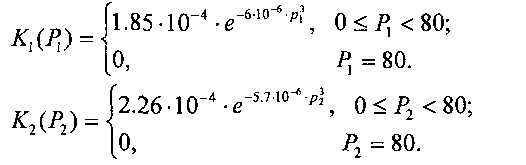
Кіріс ағынының жылдамдығын анықтайтын ішкі жүйе
Ішкі жүйеде стандартты Switch блогынан және стандартты Const блогының екі данасынан тұратын функционалды схема бар, олар кіріс резервуары ашық және жабық болған кезде екі резервуар жүйесіне су ағынының жылдамдығына сәйкес келетін мәндерді қамтиды.
Сурет 2 – кіріс ағынның жылдамдығын анықтауға арналған ішкі жүйе блогы
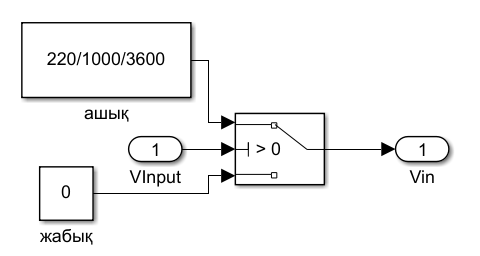
Жүйеден су ағу жылдамдығын анықтайтын ішкі жүйе
Vout блогының кірісіне K2 және h2 мәндері келеді. Бұл мәндерді бір векторға біріктіру үшін стандартты Mih блогы қолданылады. Бұл блоктан вектор стандартты as блогының кірісіне түседі, онда Vout Шығыс шамасы есептеледі.
Сурет 3 – судың ағып шығуын анықтауға арналған ішкі жүйе блогы
Резервуарлар арасындағы кранды басқарудың ішкі жүйесі
Ішкі жүйе V_12 шығыс мәнін есептейді. Mux блогы өзінің кірістеріне келетін H, h_2, K_1 және h_1 мәндерін бір векторға біріктіреді және бұл векторды Fсn стандартты блогының кірісіне береді. Fсn блогында V_12 шығыс мәні есептеледі. Switch блогында ауысу h2 мәніне байланысты жүреді.
Сурет 4 – резервуар арасындағы су жылдамдығын анықтауға арналған блок
Резервуарлар мен шығатын кран арасындағы кранды басқарудың ішкі жүйелері
K1 және K2 есептелетін ішкі жүйелер K 1 Control және k2control деп атайық. Олардың теңдеудегі коэффициенттердің мәнімен ғана ерекшеленетін бірдей функционалдық схемалары бар.
K1 control/ L2control ішкі жүйесінің кірісі Контроллерден сигнал алады. Осы сигналға байланысты кран ашылады немесе жабылады. Кранның ашылуы кез - келген оң мәнмен модельденеді - pos, ал жабылуы бірдей теріс мәнмен модельденеді-neg.(4)-теңдеу:
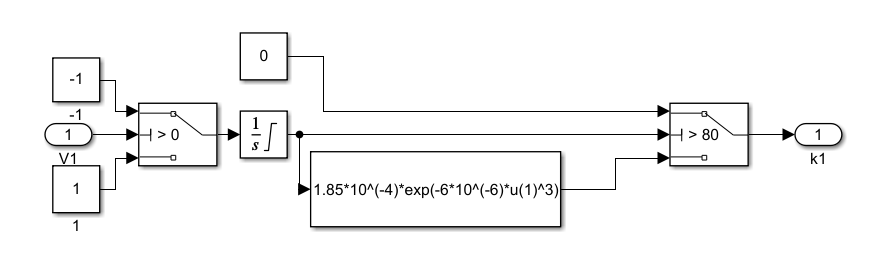
Сурет 5 – K1control Ішкі жүйе блогы бірінші кранды басқару
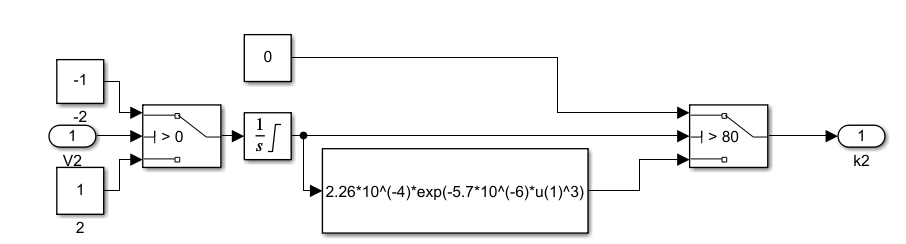
Сурет 6 – K2control екінші кранды басқару ішкі жүйесінің блогы
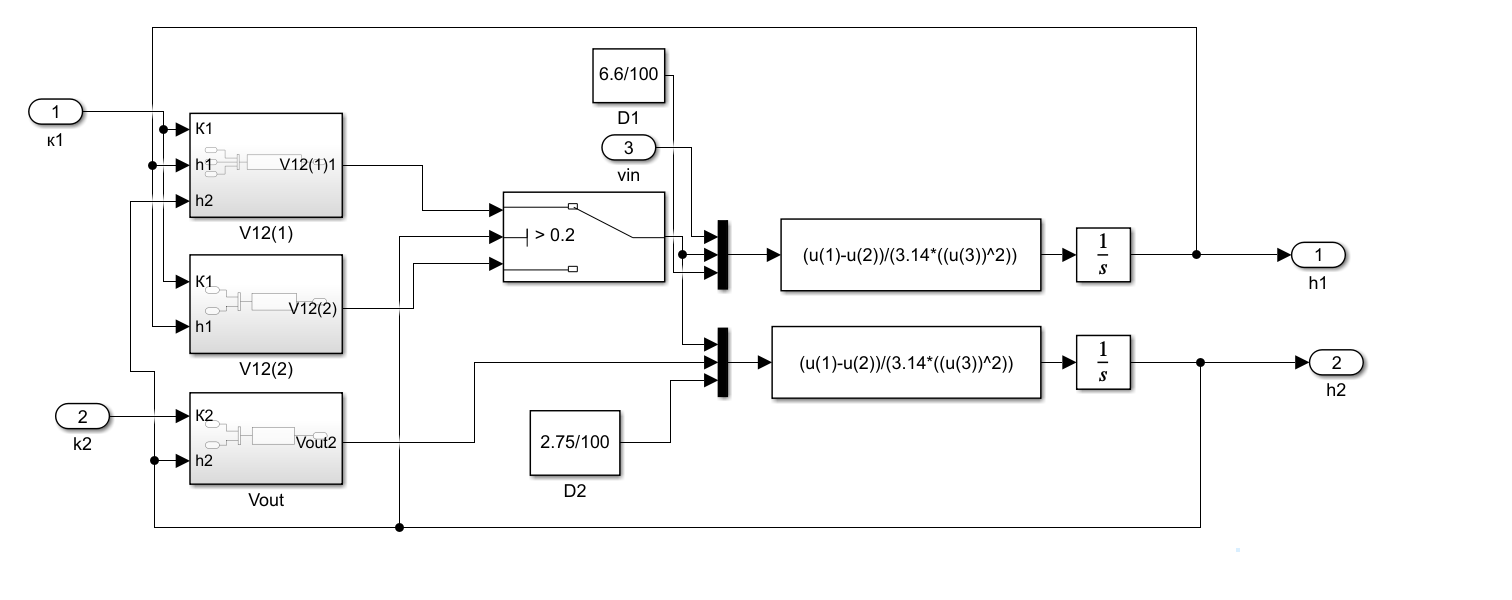
Екі резервуардағы сұйықтық деңгейін есептеудің ішкі жүйесі
Бұл ішкі жүйеде kl, k2 және Vin кіріс айнымалылары бар, олар сәйкесінше v1 және V2 крандарын басқаратын функциялардың мәндерін, сондай-ақ жүйеге су ағынының жылдамдығын білдіреді. Бұл айнымалылар қарастырылып отырған ішкі жүйеге олар есептелген блоктардың шығуынан келеді.
Шығыс айнымалылары-H1 және h2 бірінші және екінші резервуарларындағы су деңгейлері. Бұл теңдеулердің оң жағында vout және V12 шамалары бар
Сурет 7 – Two_tanks екі резервуарындағы сұйықтық деңгейін есептеудің ішкі жүйесі
Зерттеу объектісінің соңғы диаграммасы
Функционалды байланыстармен өзара байланысқан Two_Tanks, VIn_Control, k 1_control және K2_Control блоктары tank_system ішкі жүйесін құрайды. Онда контроллердің сигналдары берілетін үш кіріс (Vinput, V1, V2) және екі Шығыс – h1 және h2 бар. Tank_system құрама блогы және Const, Relational Operator және Stop Simulation стандартты блоктарының екі данасы.
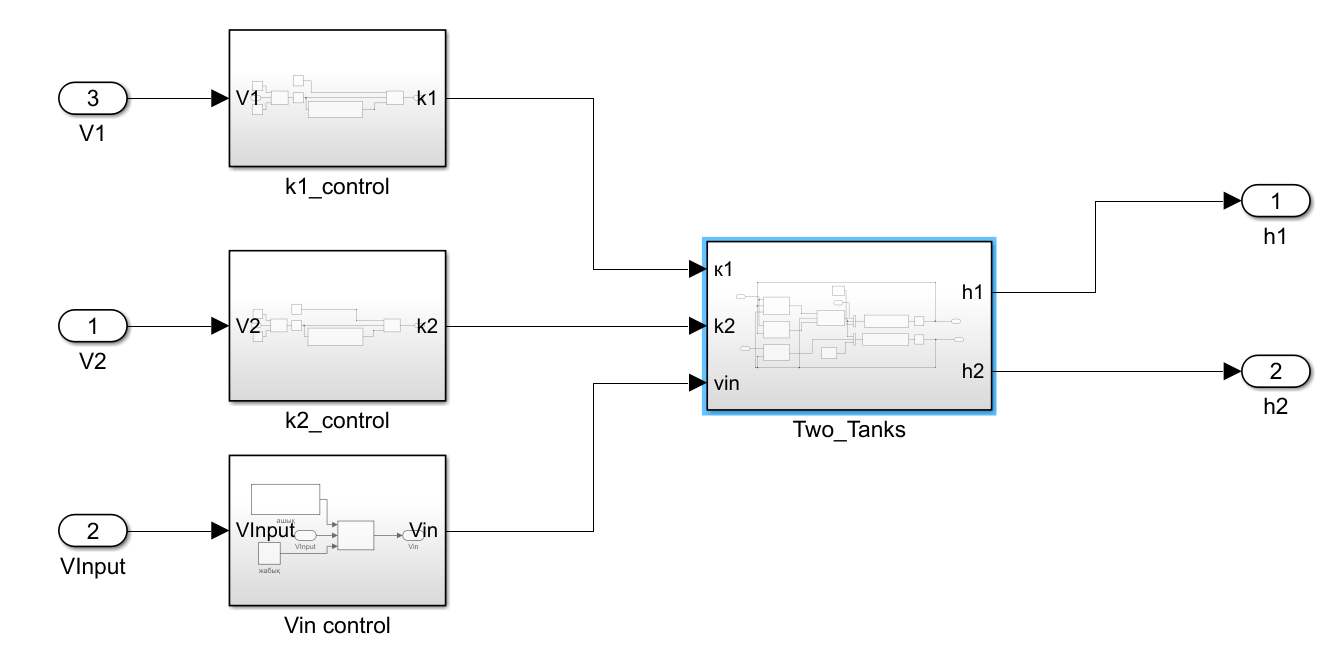
Cурет 8 –Tank system ішкі жүйесі
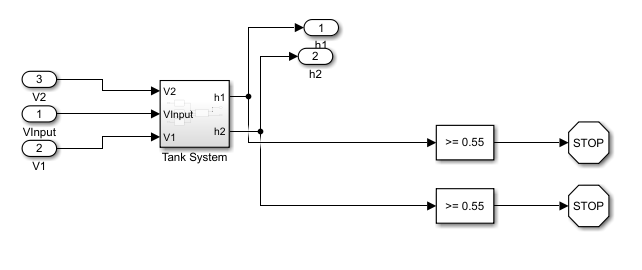
Сурет 9 – Tank system block ішкі жүйесі
Контроллер диаграммасы
Онда stateflow диаграммасын (стандартты диаграмма блогының данасы болып табылатын және контроллердің әрекетін сипаттайтын контроллер блогымен ұсынылған) және тиісті функционалдық байланыстармен қосылған tank_system_block резервуарындағы су деңгейін анықтаудың құрама блок - ішкі жүйесін қамтитын функционалдық схема бар. Hit Crossing блогының екі данасы clock және Controller блоктарын қосатын байланысқа қосылады. HitCrossing блогының тағы екі данасын controller блогының байланысына және tank_system_block блогының h2 шығысына қосыңыз. HitCrossing блоктарын пайдалану үздіксіз интеграция орын алатын Simulink моделіне енгізілген Stateflow диаграммасында ауысуларды дұрыс орындау үшін қажет.
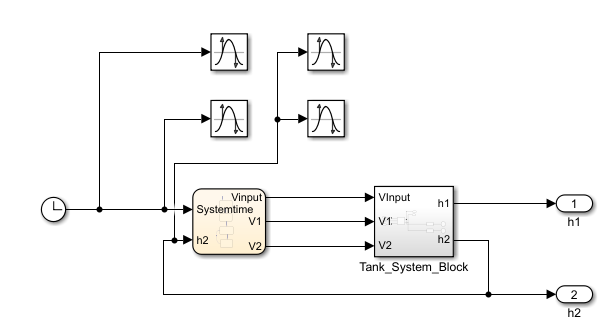
Сурет 10– System ішкі жүйе диаграммасы
Обьект моделі диаграммасының соңғы көрінісі
System блогында кірістер жоқ, бірақ екі Шығыс бар – h1 және h2, оларды векторға біріктіретін стандартты Mux блогына қосылған (h1, h2). Соңғысы Шығыс шамаларының векторын (h1, h2) беретін стандартты scope Шығыс блогымен байланысты.
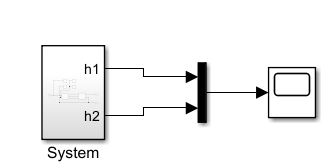
Сурет 11– Модель диаграммасының соңғы түрі
Контроллердің Блок-диаграммасы
Бұл жағдайда контроллер блогы Stateflow графикалық құралдар жинағынан Chart блогы болып көрінеді.
Бастапқы нүктеден процесс бірден State1 күйіне өтеді, бұл күй үшін кіріс сигналы кіріс кранын ашуға арналған Vinput сигналы болып табылады.
Уақыт өткеннен кейін Time1 state2 күйіне ауысады, бұл күйдің кірісіндегі сигнал резервуарлар арасындағы Кранның ашылу сигналы болып табылады.
Жүйе h2
Жүйе h2 >L_plus шарты орындалғанға дейін осы күйде болады, яғни екінші резервуардағы су деңгейі L_plus мәніне дейін өсті. Шарт орындалған кезде жүйе қайтадан State3 күйіне өтеді.
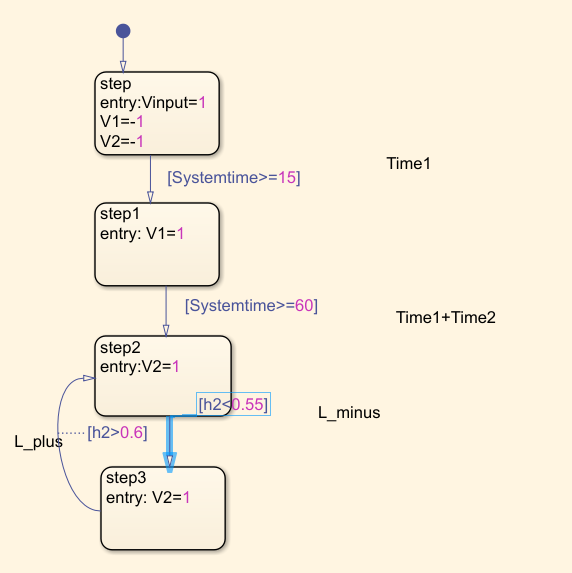
Сурет 12 –контроллердің блок – диаграммасы
Модельдегі имитациялық эксперименттер
Time1, time2, L_plus, L_minus әр түрлі мәндері бар модельді іске қосыңыз (сурет 13 – 16):