Файл: Курсовой проект по дисциплине конструкция и прочность авиационных двигателей тема Анализ статической и динамической прочности рабочей лопатки первой ступени турбины гтд тв2117.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 12.12.2023
Просмотров: 179
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
C1 = a+b·i, C2 = a-b·i(при сложении С1 и С2 их мнимые части взаимно уничтожаются).
Заметим также, что сомножители eiωt и e-iωtв слагаемых правой части уравнения (А.7) также являются комплексно сопряженными. В этом можно убедиться, записав их в тригонометрической форме:
| | eiωt = cos(ωt) + i· sin(ωt), | (А.9) |
| | | |
| | e-iωt = cos(ωt) - i· sin(ωt). | (А.10) |
Используя правила умножения комплексных чисел, можно показать, что комплексно сопряженными являются и входящие в правую часть уравнения (А.7) слагаемые C1·eiωtи C2·e-iωt.
Таким образом, из уравнения (А.7) следует, что решение исходного уравнения (А.3) лежит в комплексной плоскости и представляет собой совокупность сумм двух комплексно сопряженных чисел Z1(ωt) = C1·eiωtи Z2(ωt) = C2·e-iωt. Графическая иллюстрация этого решения приведена на рисунке А.2.
Рисунок А.2 – Графическая иллюстрация решения дифференциального уравнения, описывающего собственные колебания простейшей колебательной системы с одной степенью свободы.
Векторы Z1(ωt) и Z2(ωt), изображающие соответствующие комплексные числа, располагаются симметрично относительно действительной оси x под углами ωtи - ωt к ней. Геометрическая сумма векторов Z1(ωt) и Z2(ωt) определяет координату свободного конца упругого стержня в данный момент времени t. Углы ωtи - ωtизменяются пропорционально времени t. Векторы Z1(ωt) и Z2(ωt) описывают процесс колебаний, вращаясь вокруг начала координат комплексной плоскости в противоположные стороны. Параметр ω имеет смысл угловой скорости вращения этих векторов. В теории колебаний ω называется круговой или угловой частотой и имеет размерность рад/с.
С помощью соотношений (А.9) и (А.10) полученное на комплексной плоскости решение (А.7) может быть преобразовано в тригонометрическую форму. Подставляя соотношения (А.9) и (А.10) в решение (А.7), получим:
| | x(t) = (C1 + C2)·cos(ωt) + i·( C1 - C2)· sin(ωt). | (А.11) |
Выбранные нами ранее начальные условия t = 0, x(0) = x0 позволили определить, что C1 + C2 = x0. Рассмотрим теперь момент времени t±π/2, соответствующий углам поворота векторов Z1 и Z2, равным π/2 и - π/2, соответственно. Из рисунка 2 видно, что в момент времени t±π/2 векторы Z1 и Z2 лежат на мнимой оси yи направлены в разные стороны. При этом действительные части x(t±π/2) = 0. Тогда в соответствии с полученным решением (А.7):
| |  | (А.12) |
откуда:
| |  | (А.13) |
Комплексно сопряженные числа eiωt и e-iωt в общем виде могут быть представлены следующим образом:
| | eiωt = a + b·i, | (А.14) |
| | e-iωt = a - b·i. | (А.15) |
Подставив выражения (А.14) и (А.15) в уравнение (А.13), получим:
| | С1·a +С1· b·i = - C2·a + C2·b·i. | (А.16) |
Из рисунка А.2 видно, что в рассматриваемый момент времени tπ/2 комплексные числа Z1 = С1·a +С1· b·iи Z2 = - С2·a +С2· b·i являются чисто мнимыми, при этом их действительные части равны нулю:
С1·a = 0, - С2·a = 0. Поэтому уравнение (А.16) может быть записано в следующем виде:
| | С1· b·i = C2·b·i, | (А.17) |
откуда следует, что С1 = С2. Учитывая полученный ранее результат C1 + C2 = x0, определяем значения постоянных С1 и С2 для выбранных начальных условий: С1 = С2 = x0/2. Возвращаясь к тригонометрической форме решения исходного дифференциального уравнения (А.11) и учитывая равенство С1 = С2, получаем:
| | x(t) = (C1 + C2)·cos(ωt). | (А.18) |
Здесь сумма коэффициентов C1 + C2 представляет собой амплитуду колебаний А, равную максимальным по модулю отклонениям свободного конца упругого стержня : C1 + C2 = A = max {| x(t)|}. С учетом этого равенства можно записать решение дифференциального уравнения, описывающего собственные колебания простейшей колебательной системы с одной степенью свободы в окончательном виде:
| |  | (А.19) |
где ω - циклическая частота колебаний.
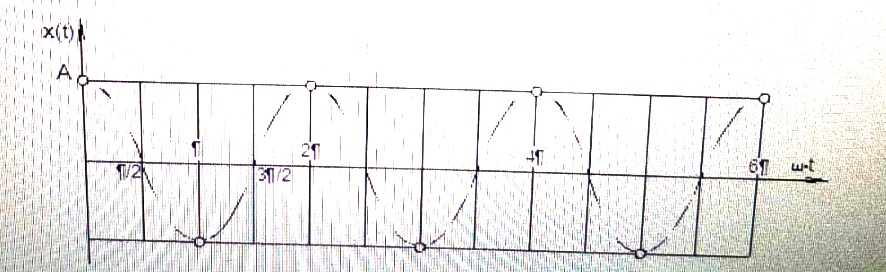
Рисунок А.3 – Зависимость координаты х свободного конца стержня от времени t в процессе свободных колебаний без затухания