Файл: "Анализ и оптимизация сар частоты вращения вала двигателя постоянного тока (сар чв дпт) ".docx
Добавлен: 09.01.2024
Просмотров: 103
Скачиваний: 6
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
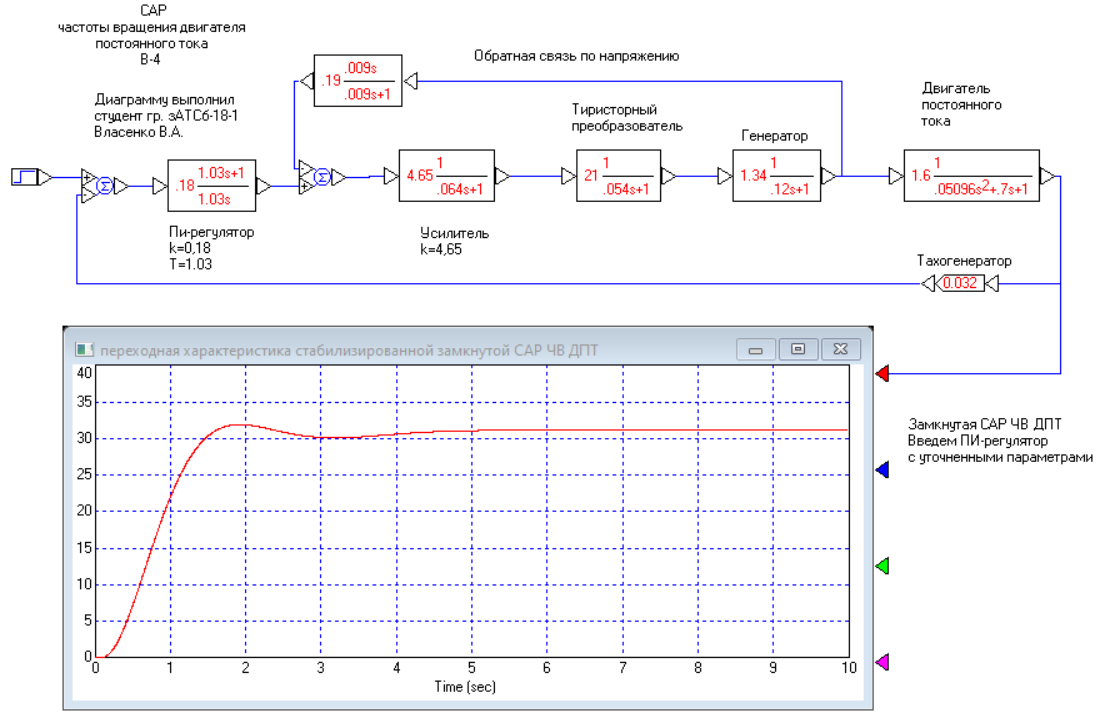
Рисунок 5.4 - Переходная характеристика окончательной САР ЧВДПТ с ПИ-регулятором
Далее необходимо определить показатели качества полученного переходного процесса, как показано на рисунок 5.5.
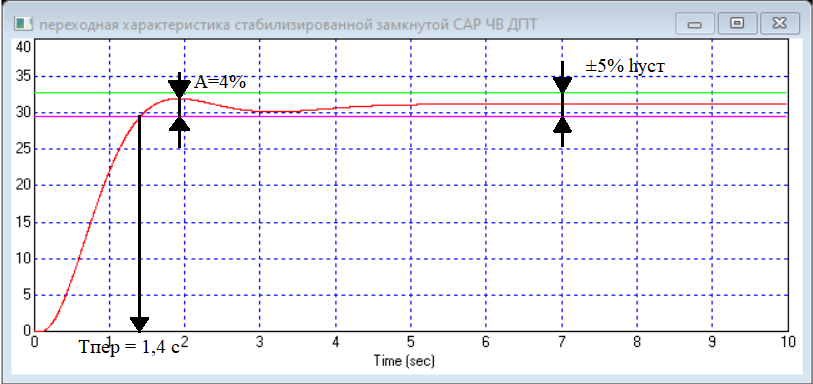
Рисунок 5.5 – Показатели качества переходного процесса САР ЧВ ДПТ
Для удобства сравнения приведем увеличенную в 20 раз переходную функцию объекта управления – двигателя постоянного тока (ДПТ).
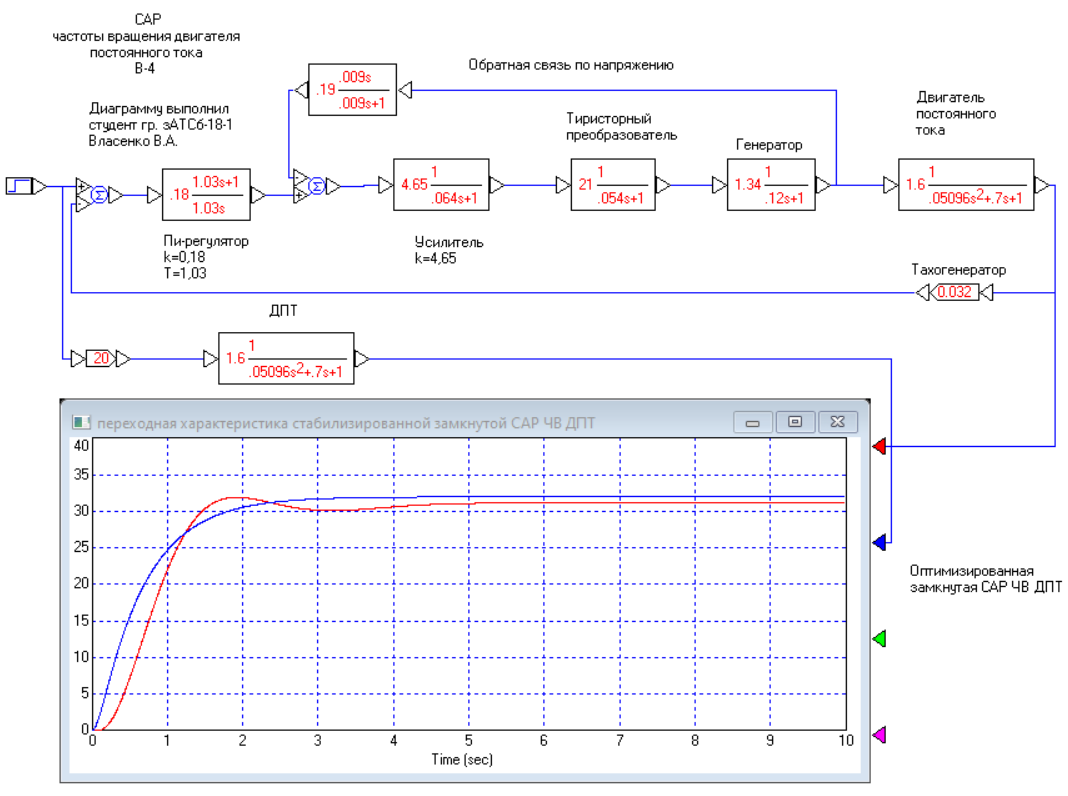
Рисунок 5.6 - Оптимизированная модель САР ЧВ ДПТ и ее переходная функция
Далее получим переходную характеристику САР в разомкнутом состоянии:
Переходная характеристика разомкнутого контура линейно увеличивается со временем, что объясняется наличием интегратора в контуре, входящего составной частью в ПИ - регулятор.
В завершение приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР ЧВ ДПТ:
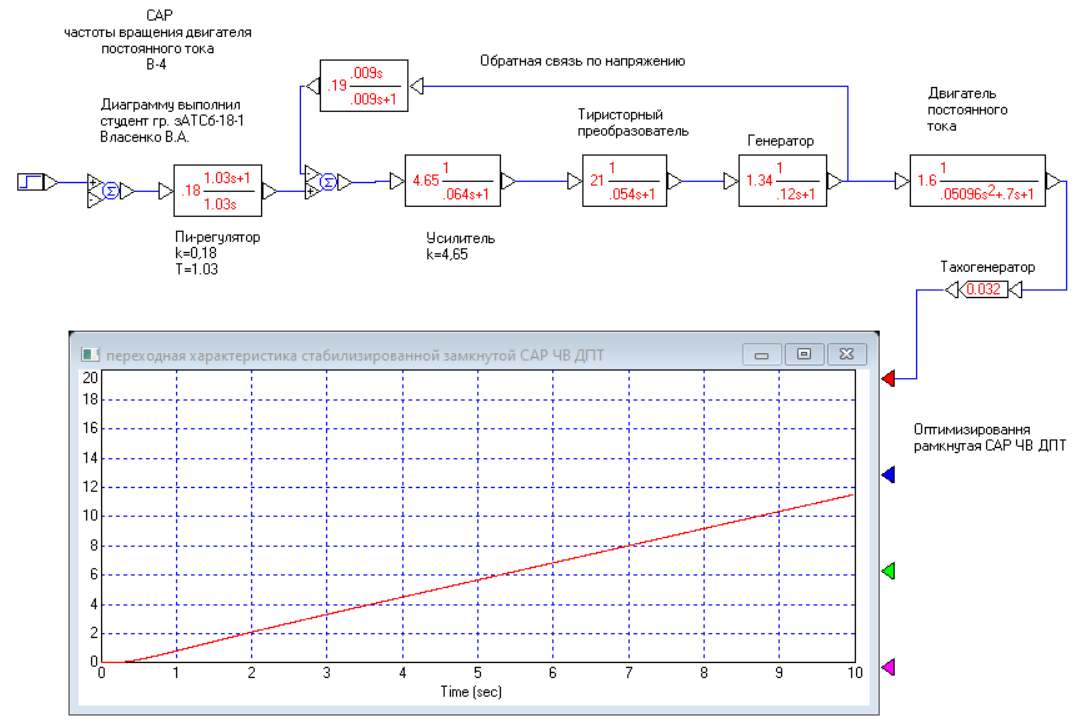
Рисунок 5.7 - Переходная характеристика разомкнутой оптимизированной САР ЧВ ДПТ
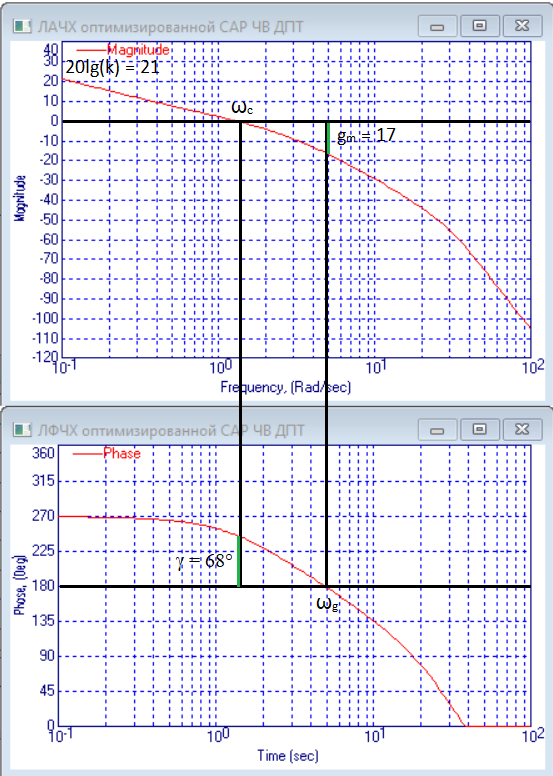
Рисунок 5.8 - Логарифмические характеристики оптимизированной САР ЧВ ДПТ
Запасы устойчивости и по фазе и по амплитуде, а также усиление контура – хорошие.
6 Оценка качества САР
6.1 Показатели качества переходного режима
Показатели качества переходного режима определяются по переходной характеристике САР. Для САР по рисунок 5.5 определены tпер = 1,4с и σ = 4%.
6.2 Показатели качества установившегося режима
Поскольку оптимизированная САР является астатической, то ее коэффициент ошибки с0 = 0. Это косвенно видно по рисунок 5.5. Для определения коэффициента ошибки по скорости с1, к входу САР нужно подключить генератор линейно растущего сигнала. Установившееся значение сигнала ошибки равно величине с1:
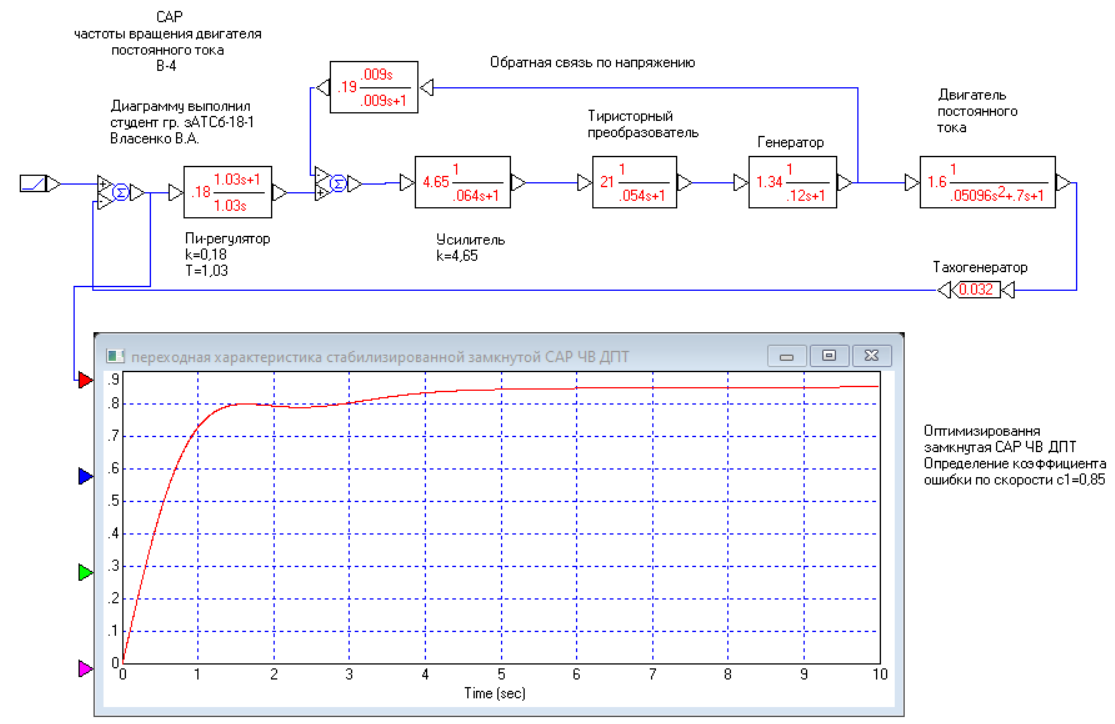
Рисунок 6.1 - Диаграмма для определения коэффициента ошибки по скорости астатической САР
6.3 САР ЧВ ДПТ осуществляет слежение и стабилизацию
Для проверки качества САР и в режиме слежения, и в режиме стабилизации одновременно подадим на нее и ступенчатое задание, и ступенчатое возмущение. Этим воздействиям для наглядности переходной характеристики придадим разные задержки.
Возмущение задержано относительно задания на 5 сек. По переходной характеристике видно, что САР компенсирует возмущение примерно за 4 секунд
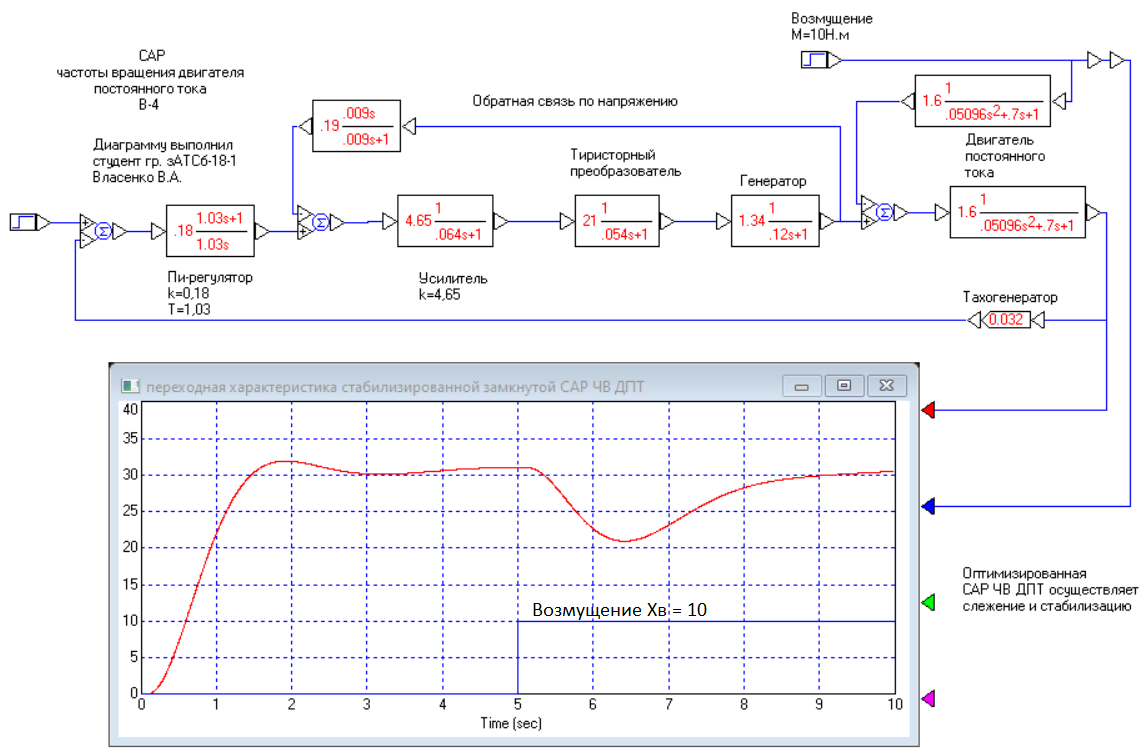
Рисунок 6.2 - Совокупное воздействие на САР ЧВ ДПТ ступенчатых задания и возмущения