Добавлен: 09.01.2024
Просмотров: 26
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Тема: Подъемно-транспортное оборудование
1. Подъемно-транспортное оборудование
Подъемно-транспортное оборудование является существенной частью почти каждого производства и сфер обслуживания и играет большую роль в механизации погрузочно-разгрузочных работ.
Основная задача применения подъемно-транспортной техники – внедрение высокопроизводительных комплексов, включающих в себя принципиально новые системы подъемно-транспортных машин. Комплексная механизация и автоматизация погрузочно-разгрузочных, транспортных и складских работ осуществляется на основании:
1)создания качественно новых подъемно-транспортных машин и установок;
2)повышения грузоподъемности при одновременном снижении материалоемкости за счет применения новых материалов, технологий;
3)увеличения производительности за счет применения автоматического и дистанционного управления социальных захватных и других подъемных агрегатов, а также улучшение условий труда крановщиков;
4)повышения надежности работы машин и долговечности их элементов путем разработки новых конструктивных решений, применения новых методов расчета и материалов с улучшенными физико-механическими свойствами.
По своему назначению и конструктивному исполнению подъемно-транспортные машины подразделяются на основные виды:
- грузоподъемные – машины периодического действия,
- транспортирующие – машины непрерывного действия,
- промышленные роботы – автоматические машины периодического действия.
Основные виды подъемно-транспортных машин:
грузоподъемные машины – домкраты, лебедки (тали), грузоподъемные краны и погрузчики.
Транспортирующие машины (конвейеры) подразделяются на машины
- с тяговым органом – ленточные конвейеры, цепные конвейеры, тележечные конвейеры,
- машины без тягового органа – гравитационные устройства, качающиеся конвейеры, шнеки (винтовые конвейеры), пневматические транспортирующие устройства.
Промышленные роботы, подразделяющиеся по назначению, конструктивным показателям, способу управления, быстродействию, точности.
Грузоподъемные машины предназначены для подъема и перемещения грузов на небольшие расстояния в пределах определенной площади промышленного предприятия и склада. Они характеризуются следующими основными параметрами: грузоподъемностью, скоростями движения отдельных механизмов, режимом работы, пролетом, вылетом, высотой подъема грузозахватного устройства. Значение этих параметров регламентируется стандартом.
1.1. Домкраты. Назначение и устройство
Для подъема груза на небольшую высоту (до 0,8—1 м) служат простейшие грузоподъемные механизмы — домкраты, обычно применяемые при ремонтных и монтажных работах. Привод домкратов может быть ручным и механическим.
Различают винтовые, рычажно-реечные, зубчато-реечные и гидравлические домкраты. На рис. 1, а в качестве примера показано устройство ручного винтового домкрата на салазках, облегчающих его точную установку под грузом
Устройство ручного винтового домкрата: подъемный стальной винт 3 домкрата ввернут в гайку 4, укрепленную в корпусе 7. На верхней части винта установлена рифленая головка 5, которая может поворачиваться относительно винта. Вращение винта 3 производится рукояткой 6 с двусторонней трещоткой W. В зависимости от положения трещотки, фиксируемой кулачком 9, осуществляют вращение винта в одну или в другую сторону. Корпус домкрата в нижней части имеет опорную плиту— гайку, перемещающуюся по направляющим при вращении винта горизонтального перемещения. Вращение этого винта производится рукояткой 2, снабженной трещоткой 8.Грузоподъемность винтовых домкратов колеблется от 2 до 20 т.
Грузоподъемность гидравлических домкратов достигает 200 т. Недостатками их являются ограниченная высота подъема груза и малые скорости. Гидравлический домкрат с ручным приводом состоит из скалки 6, снабженной в верхней части упорной головкой 1. Скалка входит в цилиндрическую часть корпуса 5, в нижнюю часть которого плунжерным насосом 4 через систему отверстий и клапанов подается рабочая жидкость (обычно масло). Насос работает от рукоятки 2, при качании которой перемещается плунжер 3 насоса, и жидкость через нагнетательный клапан поступает в пространство между скалкой и дном корпуса. Для опускания скалки необходимо рукоятку 2 отклонить за пределы рабочего положения. При этом открывается выпускной клапан и жидкость под воздействием силы тяжести груза перетекает из-под скалки в запасной резервуар. Изменяя отклонение рукоятки, изменяют степень открытия отверстия выпускного клапана и таким образом регулируют скорость опускания груза. Числовое значение скорости подъема груза определяется количеством рабочей жидкости, подаваемой под скалку 6 в единицу времени. Так как скорость подъема груза при ручном приводе весьма невелика, то при больших высотах подъема и больших грузоподъемностях гидравлические домкраты имеют механизированный привод.
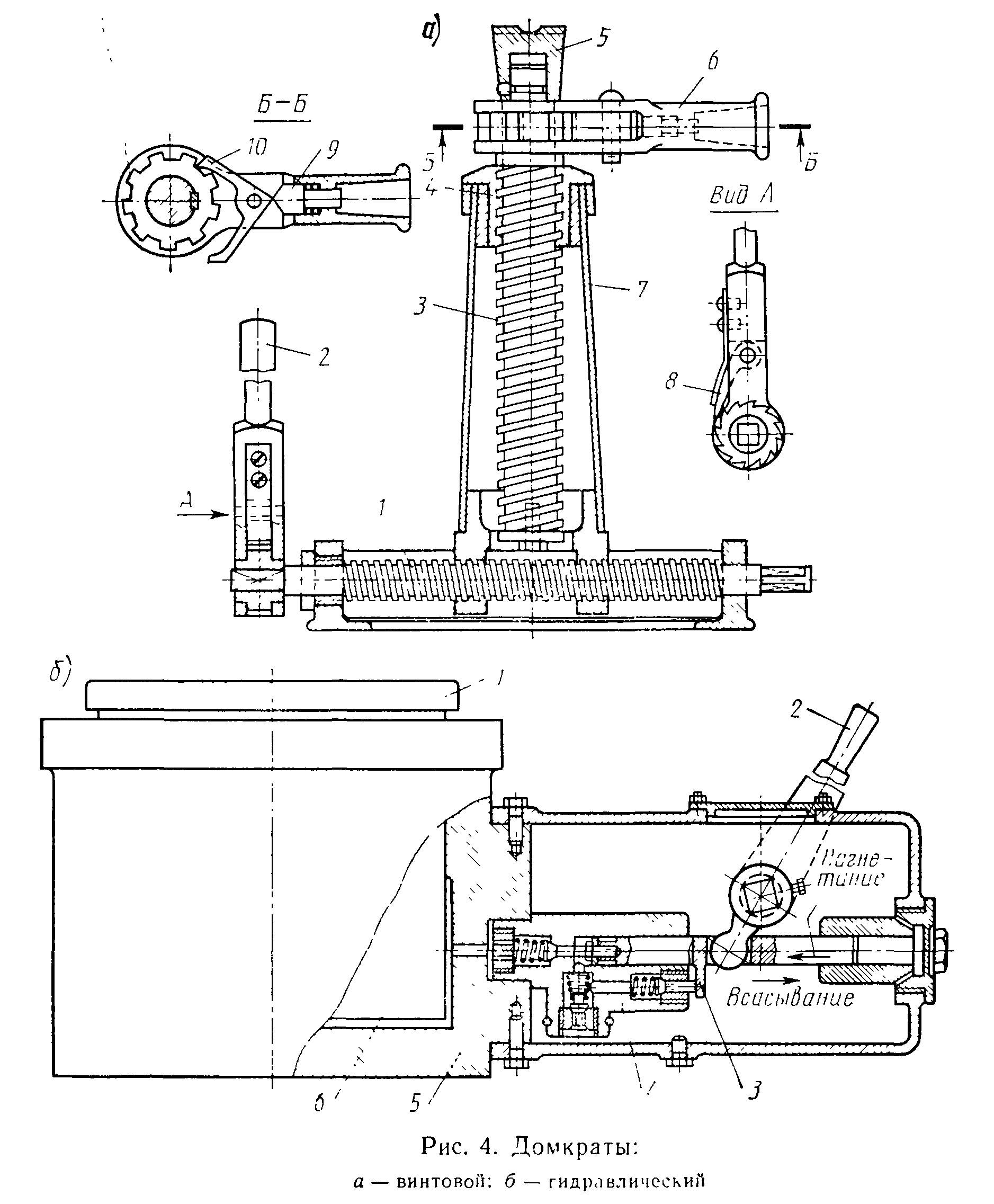
Рисунок 1. Домкраты:а-винтовой, б-гидравлический
1.2. Мостовой кран. Назначение и устройство
Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на большие расстояния.
По особенностям конструкций, связанным с назначением и условиями работы, краны разделяются на мостовые, портальные, козловые, башенные и др. В цехах предприятий электромашиностроения наибольшее распространение получили мостовые краны, с помощью которых производится подъем и опускание тяжелых заготовок, деталей и узлов машин, а также их перемещение вдоль и поперек цеха. Вид мостового крана в основном определяется спецификой цеха и его технологией, однако многие узлы кранового оборудования, например механизмы подъема и передвижения, выполняются однотипными для различных разновидностей кранов.
Мостовые краны в зависимости от назначения и характера выполняемой работы снабжают различными грузозахватными приспособлениями: крюками, грейферами, специальными захватами и т.п. Мостовой кран весьма удобен для использования, так как благодаря перемещению по крановым путям, расположенных в верхней части цеха, он не занимает полезной площади.
Подъемный кран представляет собой грузоподъемную машину циклического действия, предназначенную для подъема и перемещения груза, удерживаемого грузозахватным устройством (крюк, грейфер). Он является наиболее распространенной грузоподъемной машиной, имеющей весьма разнообразное. Мостовой кран (рис.2) представляет собой мост, перемещающейся по крановым путям на ходовых колесах, которые установлены на концевых балках. Пути укладываются на подкрановые балки, опирающиеся на выступы верхней части колонны цеха. Механизм передвижения крана установлен на мосту крана. Управление всеми механизмами происходит из кабины, прикрепленной к мосту крана. Питание электродвигателей осуществляется по цеховым троллеям. Для подвода электроэнергии применяют токосъемы скользящего типа, прикрепленные к металлоконструкции крана. В современных конструкциях мостовых кранов токопровод осуществляется с помощью гибкого кабеля. Привод ходовых колес осуществляется от электродвигателя через редуктор и трансмиссионный вал.
Любой современный грузоподъемный кран в соответствии с требованиями безопасности, может иметь для каждого рабочего движения в трех плоскостях, следующие самостоятельные механизмы: механизм подъема - опускания груза, механизм передвижения крана в горизонтальной плоскости и механизмы обслуживания зоны работы крана (передвижения тележки).
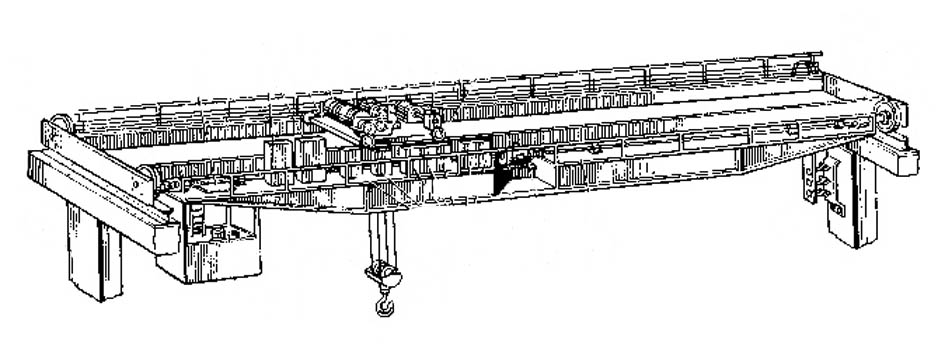
Рис.2. Общий вид мостового крана.
Основная характеристика двухбалочных мостовых кранов:
– пролет, он составляет 10,5 – 34,5 м;
- грузоподъемность – 5 – 100 т.
При грузоподъемности 1 – 5 т применяют однобалочные краны (кран-балки) с электроприводом. Применяются также опорные однобалочные и двухбалочные мостовые краны с ручным приводом грузоподъемностью от 3,2 до 20 т.
1.3. Конвейеры и элеваторы. Назначение и устройство
Конвейеры являются составной частью технологического процесса предприятия и основными средствами комплексной механизации и автоматизации погрузочно-разгрузочных и складских операций.
Ленточный конвейер — это машина для непрерывного транспортирования грузов, грузонесущим и тяговым элементом которой являются замкнутые ленты (рис.3). Лента увлекается вращающимся ведущим барабаном за счет возникающих между ними сил трения. Ведомый барабан с помощью натяжного устройства создает требуемое натяжение ленты.
Перемещаемые ленточным конвейером грузы (штучные или сыпучие) укладываются на несущую ленту, которая составлена из нескольких прорезиненных слоев хлопчатобумажной ткани. Для конвейеров большой длины выпускают ленты, армированные тонкими стальными канатиками. Скорость конвейерной ленты 1,5—2,5 м/с для сыпучих грузов и 0,5—1,5 м/с для штучных. Ленточные конвейеры могут перемещать груз под углом до 20°. В случае, если требуется поднимать грузы на больший угол, на ленту через определенные промежутки устанавливают поперечные планки-удерживатели.
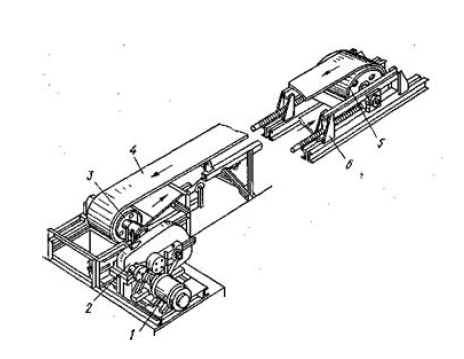
Рисунок 4. Ленточный конвейер: 1 — электродвигатель, 2 — редуктор, 3, 5 ведущий и ведомый барабаны, 4 — лента, 6 натяжное устройство.
Элеваторы — это конвейеры для транспортирования грузов в ковшах, жестко прикрепленных к тяговому элементу, в вертикальном или крутонаклонном направлении (рис.5). Элеваторы состоят из вертикального короба, внутри которого перемещается бесконечная цепь или лента с равномерно закрепленными на ней грузовыми ковшами или грузоприемнымй площадками. Элеваторы способны поднимать грузы на высоту до 50 м при производительности до 400 м3/ч.
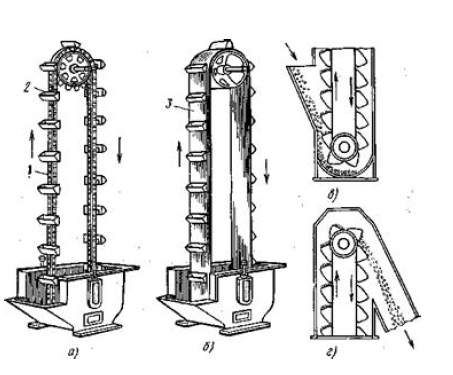
Рисунок 5. Элеваторы:
а — цепной, б — ленточный, в — загрузка элеватора, г — разгрузка элеватора; 1 — цепь, 2 — ковш, 3 — лента