ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.01.2024
Просмотров: 77
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Расчет величины сглаживающего дросселя
Расчет потерь мощности и КПД выпрямителя и ЭП в целом
Передаточные функции датчиков тока, скорости и тиристорного преобразователя.
Передаточная функция тиристорного преобразователя
Определение передаточной функции датчика тока
Синтез системы подчиненного регулирования ЭП лебедки
Передаточная функция управляемого тиристорного выпрямителя вместе с системой импульсно-фазового управления СИФУ может быть представлена апериодическим звеном первого порядка с постоянной времени Тп ≈ 0,0004 - 0,01 с
Принимаем Тув= Т1=0,0067 с.

Передаточная функция управляемого выпрямителя имеет вид:

Определение передаточной функции датчика тока
Выбираем датчик тока фирмы LEM типа HY 10-P, параметры которого:
– номинальное значение входного тока IвхN: ± 25 А;
– точность в процентах к номинальному значению тока: 2,5 %;
– диапазон преобразования: 3·IN А;
– выходной сигнал UдтN= 4 В;
– рабочая частота: 0…25 кГц;
– напряжение питания: ± 15 В;
– потребляемый ток: 20 mА;
– рабочая температура: -10…+75 оС;
– габаритные размеры мм: 36 * 33 * 12.
Передаточная функция собственно датчика тока определяется следующим образом:

Передаточная функция согласующего устройства имеет вид:

Передаточная функция датчика тока с согласующим устройством:

Определение передаточной функции датчика скорости
Выбираем тахогенератор типа СЛ-161, параметры которого:
– номинальная скорость вращения Ωтг N=366.5 рад/с;
– номинальное выходное напряжение тахогенератора Uтг N=75 В.
Передаточная функция тахогенератора имеет вид:

Передаточная функция согласующего устройства имеет вид:

Тогда передаточная функция датчика скорости в целом имеет вид:

Синтез системы подчиненного регулирования ЭП лебедки
Проектируемая система является системой, регулируемой по скорости и содержит два контура, контур тока (внутренний контур) и контур скорости (внешний контур).
Необходимо рассчитать параметры регулятора тока и регулятора скорости.

Т1=0,0067 с.- некомпенсируемая (или малая) постоянная времени

Расчет контура производится для случая неподвижного (заторможенного) якоря или при выключенном возбуждении двигателя.
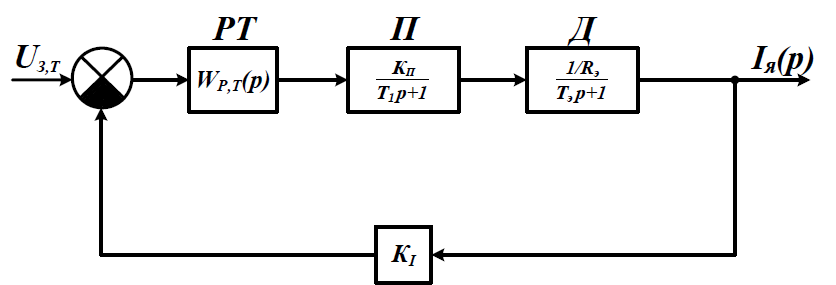
Рис.3 Cруктурная схема контура регулирования тока в системе подчиненного регулирования
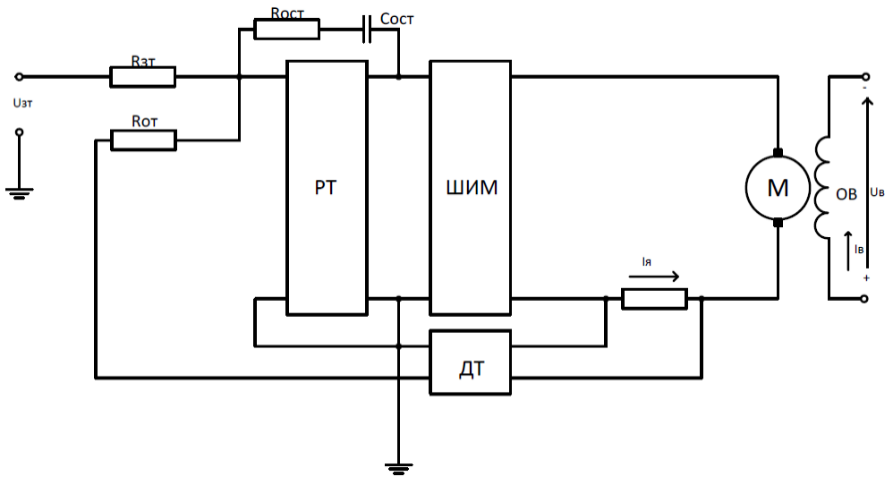
Рис.4. Принципиальная электрическая схема контура регулирования тока
В контуре тока имеются две инерционности, характеризуемые постоянными времени:
-
Тэ=0,371 с – электромагнитная постоянная времени якорной цепи; -
Т1=0,0067 с.- некомпенсируемая (или малая) постоянная времени
Передаточная функция разомкнутого контура тока преобразователя и якорной цепи двигателя имеет вид:

В качестве регулятора должен быть применен ПИ – регулятор, передаточная функция которого:
 – постоянная времени регулятора тока.
– постоянная времени регулятора тока.Тогда передаточная функция разомкнутого контура тока:

Необходимо принять Т0=Тэ.
Необходимую форсировку для этой компенсации будет создавать регулятор, воздействуя на схему управления ШИП. В результате передаточная функция разомкнутого токового контура принимает вид:
Передаточная функция замкнутого токового контура
Замкнутый контур представляет собой систему второго порядка.
Коэффициент затухания системы
Это условие будет выполнено, если коэффициент при
р в характеристическом уравнении системы будет равен:

Откуда определяем требуемую постоянную времени регулятора тока

Тогда параметры ПИ – регулятора


Зададимся величиной емкости конденсатора цепи обратной связи регулятора тока С=0,1мкФ=0,1·10-6 Ф определим величину резисторов R1 и Rос:


Принимаем значения R1=2650 кОм, а Rос=3750 кОм.
Передаточная функция ПИ– регулятора

где


Передаточная функция регулятора тока примет вид:

При таком регуляторе тока передаточная функция замкнутой по току системы

Как видно из этой передаточной функции, получилось характеристическое уравнение контура с оптимальным соотношением коэффициентов, что и требовалось. Значит, переходный процесс в контуре тока при выбранной настройке регулятора будет оптимальным при скачке сигнала задания тока Uз.т.
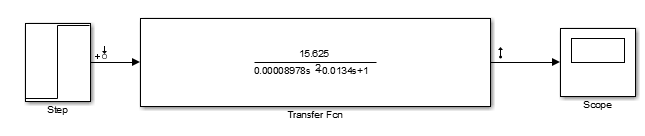
Рис.5. Передаточная функция контура в Simulink
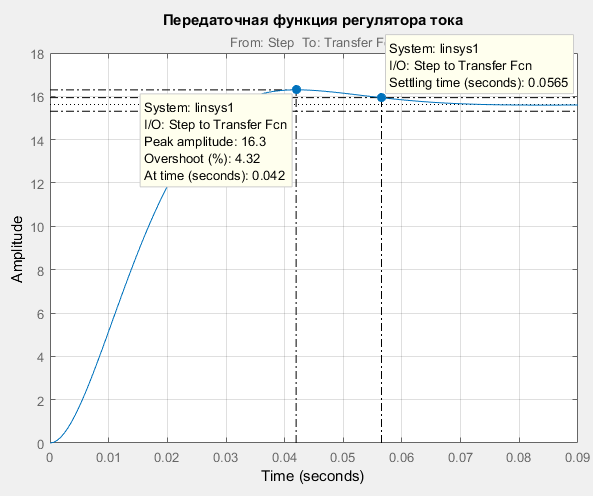
Рис.6. Промоделированная передаточная функция
Перерегулирование σ =4.32%, время переходного процесса 0.0565 с.
Аналогичным образом, как и в случае контура тока, рассчитывается настройка (параметры регулятора) контура регулирования скорости. В этом контуре используется либо П– регулятор, либо ПИ– регулятор скорости.
П– регулятор применяется при малом диапазоне регулирования угловой скорости.
Так как параметры регулятора выбираются из условия обеспечения заданного качества переходного процесса, то жесткость механических характеристик привода оказывается неконтролируемой и не высокой.
Отношение статического падения угловой скорости в системе с П- регулятором скорости ΔΩс.з к статическому падению угловой скорости при работе двигателя в разомкнутой системе

Перепад скорости замкнутой системы с П-регулятором в 400 раз больше, чем разомкнутой системы.
Перепад скорости разомкнутой системы

следовательно, замкнутая система с П– регулятором скорости обеспечит перепад скорости

В задании точность поддержания скорости перемещения груза определена значением

Таким образом, угловая скорость вращения двигателя прямо пропорциональна линейной скорости перемещения груза, поэтому точность поддержания угловой скорости вращения двигателя равна заданной точности поддержания линейной скорости перемещения груза.
Следовательно, допустимое отклонение угловой скорости вращения двигателя составляет

Вывод: Система с П-регулятором скорости не обеспечит требуемую точность поддержания скорости.
Расчет параметров скоростного контура
Коэффициент усиления регулятора и его параметры при настройке на технический оптимум по управляющему воздействию рассчитываются по формуле:

Определим величину входного сопротивления R1 и сопротивления обратной связи усилителя Rос пропорциональной части регулятора.
Если принять R1=500 кОм, то

Принимаем

Постоянная времени Т0 интегральной части принимается равной

а емкость

Передаточная функция ПИ– регулятора скорости имеет вид:


Передаточная функция разомкнутой по скорости системы с регулятором скорости


Передаточная функция замкнутой по скорости системы с датчиком скорости в цепи обратной связи, коэффициент передачи которого kΩ:




Рис.7. Передаточная функция контура в Simulink
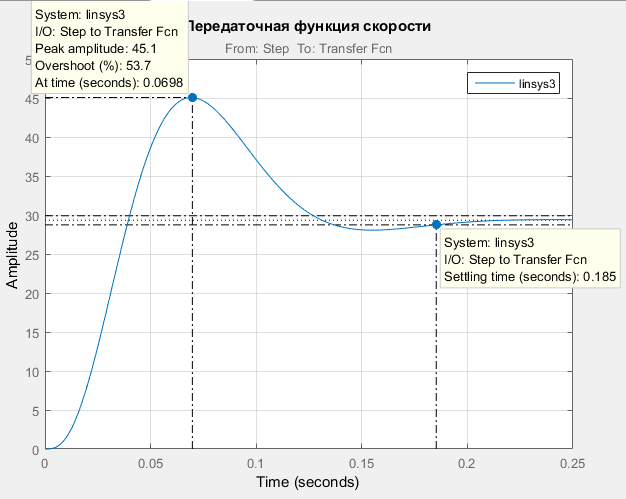
Рис.8. Промоделированная передаточная функция
При таком регуляторе при скачке входного сигнала перерегулирование по угловой скорости составит 53.6%.
Перерегулирование (σ) можно уменьшить установкой на входе регулятора скорости инерционного звена (фильтра) с передаточной функцией

Передаточная функция системы ЭП с замкнутыми токовым и скоростным контурами и входным фильтром




Рис.9. Передаточная функция контура в Simulink
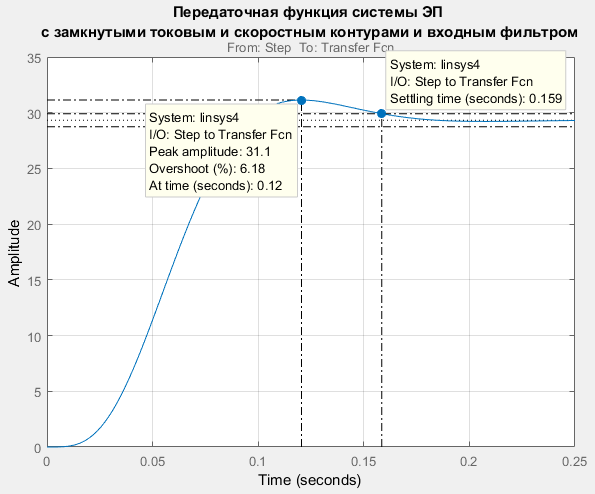
Рис.10. Промоделированная передаточная функция
Получаем перерегулирование 6.18%, что соответствует техническому оптимуму. Время перерегулирования увеличено.
Характеристическое уравнение контура скорости при ПИ– регуляторе и входном фильтре получается четвертого порядка.
Вывод
Для заданных параметров был выбран двигатель ДПЦЯ-3, и рассчитана силовая схема усилителя мощности. Выбран трансформатор ОСМ-0,160, шесть тиристоров типа ТЧ40, дроссель типа Д338.