Файл: Автоматизация газоперекачивающих агрегатов с газотурбинным приводом компрессорных станций магистральных газопроводов.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 285
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Определим количественные характеристики надёжности системы.
Введём обозначения:
Запишем вероятность отказа i - й группы.
Имеем
Запишем вероятность безотказной работы i - ой группы. Имеем
Запишем вероятность безотказной работы системы с поэлементным резервированием
и
Для равнонадёжных элементов системы имеем:
7. Расчет надежности системы со скользящим резервированием.
Скользящее резервирование – это резервирование замещением, при котором группа основных элементов объекта резервируется одним или несколькими резервными, каждый из которых может заменить любой отказавший элемент в данной группе.
Скользящее резервирование всегда является активным, всегда имеется переключающее устройство, определяющее наличие отказа и включающее резервный элемент (рис. 5).
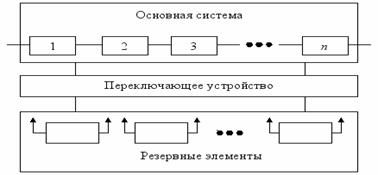
Рис. 5. Схема скользящего резервирования
Скользящее резервирование используется для резервирования нескольких одинаковых (или взаимозаменяемых) элементов системы одним или несколькими резервными, причем резервирование может быть как нагруженным так и ненагруженным. Отказ системы произойдет, если число отказавших основных элементов превысит число резервных.

При нагруженном скользящем резервировании с идеальными переключателями расчет надежности системы аналогичен расчету систем типа «n из m». Если интенсивности отказов основных и резервных элементов постоянны и одинаковы, то вероятность безотказной работы системы, содержащей n основных и m резервных элементов, в режиме нагруженного резерва можно определить по формуле:
Если вероятность безотказной работы элементов подчиняется экспоненциальному закону, то можно рассчитать и среднюю наработку системы:

При ненагруженном скользящем резервировании в общем случае характеристики надежности системы выражаются сложными формулами. Однако если интенсивности отказов основного и резервных элементов постоянны и одинаковы, т. е. вероятность безотказной работы элементов подчиняется экспоненциальному закону, то вероятность безотказной работы системы, содержащей n основных и m резервных элементов, в режиме ненагруженного резерва можно определить по формуле Пуассона:
Так как при ненагруженном скользящем резервировании суммарная интенсивность отказов равна nλ и отказ системы произойдет в момент отказа (m+1)-го элемента, то средняя наработка системы
обобщенная характеристика возможности реализации опасности в техногенной сфере, определяемая через вероятность возникновения техногенной аварии или катастрофы и математическое ожидание негативных последствий от них. Источниками Р.т. являются отказы технических систем, ошибки операторов и персонала (человеческий фактор), опасные природные процессы. Для снижения Р.т. применяются комплексные методы - построение систем защит и барьеров для развития техногенных аварий и катастроф, проведение диагностики и мониторинга технических систем и операторов, применение сил и средств предупреждения и локализации чрезвычайных ситуаций техногенного характера.
Вопросы по дисциплине «Микропроцессорные системы»
-
Коммуникация между контроллером и подсистемой ввода/вывода.
Такая коммуникация возможна благодаря интерфейсному модулю, поддерживающему один из принятых коммуникационных протоколов.
Обмен данными осуществляется по специальным цифровым соединительным линиям, таким как: Profibus DP, Modbus RTU, Modbus +, CAN, DeviceNet, ControNet и т.д. Вообще, насчитывается более пятидесяти стандартов промышленных соединительных линий.
Коммуникационная линия работает по принципу ведущий-ведомый (master-slave). Только ведущее устройство на соединительной линии может инициировать обмен данными. Ведомые устройства пассивно прослушивают все данные, идущие по шине, и только в случае получения запроса от ведущего устройства отправляют обратно ответ. Каждое устройство на линии имеет свой уникальный сетевой адрес, необходимый для однозначной идентификации. Узлы ввода и вывода, как правило, являются ведомыми устройствами, в то время как контроллеры – ведущими.
Приведу пример работы контроллера с датчиком.
В станке PAPP имеется пневматический насос для накачки камер для загиба борта. Когда он не работает, его статусный (выходной) контакт разомкнут. Соответствующий дискретный вход модуля находится в состоянии “0”. Как только насос запустили, его статусный контакт замыкается, и напряжение 24 V поступает на клеммы входа DI. Модуль, получив напряжение на дискретном входе, переводит его в состояние “1”. По сути это и есть работа всего контроллера.
До сих пор мы рассматривали узлы распределенного ввода/вывода, которые устанавливаются зачастую на большом расстоянии от центрального контроллера. В этом случае дистанционное взаимодействие осуществляется по цифровой шине в соответствие со схемой, описанной выше. Такое территориальное разделение ввода и вывода и управляющих устройств характерно для класса РСУ (Распределённой системы управления).
Однако многие производители АСУ ТП поступают проще: вместо интерфейсного модуля устанавливают небольшой контроллерный модуль, который также снабжается сетевым интерфейсом. При этом узел распределенного ввода и вывода превращается в PLC с так называемым локальным вводом и выводом. Это уже не просто устройство связи с объектом управления, а полноценная система автоматизации, способная автономно выполнять многие задачи автоматического регулирования. Такие контроллеры “все в одном” характерны для систем класса PLC, например, PLC серии ControlLogix производства американской компании Rockwell Automation, где контроллерные модули и ввод и вывод располагаются на одной базовой панели. Общение меду ними происходит по внутренней шине данных, встроенной в базовую панель.
-
Характерные аспекты для систем PLC.
Следующие аспекты характерны для систем класса PLC: •Высокоскоростное управление дискретными операциями; •Отказоустойчивость системы управления не критична: в случае останова технологический процесс возобновляется в короткие сроки и с минимальными потерями; •Практическое отсутствие операторского уровня – высокая степень автономности; •Быстрая реакция на дискретные события; •Жесткая временная синхронизация работы нескольких узлов.
-
Архитектура контроллеров.
Даже краткое знакомство с тем, что собой представляют промышленные контроллеры и как осуществляется создание систем управления на их базе, приводит нас к представлению о том, что понятие ПЛК не ограничивается «железом», это целостная современная технология. Она включает специфическую аппаратно-программную базу с определенными принципами организации совместной работы ее компонентов, специализированные языки программирования, подходы объединения в различные сети и т.д.
Формировать состав аппаратных средств системы управления, и тем более создавать программу работы контроллера невозможно без четкого представления о принципах реализации их архитектуры. Под архитектурой контроллеров (как, собственно, и других вычислительных средств, и систем) понимают совокупность общих структурных и логических подходов к созданию аппаратных средств, программного обеспечения и принципов организации взаимосвязанной работы их компонентов. За долгие годы для ПЛК сложились определенные архитектурные решения, которых придерживается абсолютное большинство производителей.