ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 11.01.2024
Просмотров: 68
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
В 2018 году комплекс МРК-35 был принят на снабжение войск Национальной гвардии РФ.
Налажено производство мелкосерийного модернизированного комплекса МРК-35.
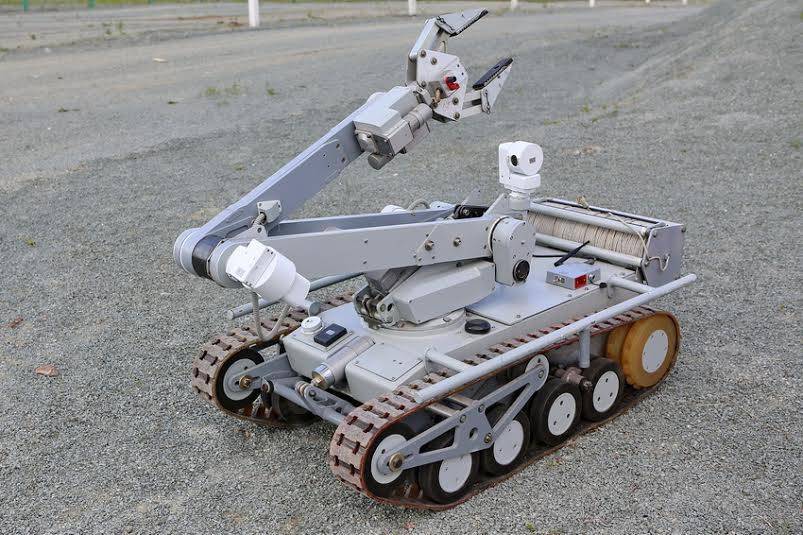
Рис. 1.1. МРК-35
МРК-35 поставлен в следующие организации:
-
РОСГВАРДИЯ РФ.
Цель:
-
Проведение проверок; -
Осуществление аварийно-спасательных мероприятий; -
Провести взрывные работы
Выполненные операции:
-
Визуальный интеллект; -
Поиск, эвакуация и уничтожение взрывных устройств; -
Транспорт объектов
Базовый состав:
-
Цельное шасси с изменяемой геометрией колеи; -
Манипулятор 5 градусов + захват; -
Электромеханический редуктор; -
Налоговая система; -
Система питания -
Рабочее место оператора (тележка и / или чемодан); -
Радиостанция; -
Технологический пульт управления;
Вложения:
-
Цветные телевизоры: -
Стационарная телекамера на ручке манипулятора; -
Одноосная телекамера; -
Две двумерные телекамеры с функцией ZOOM; -
Кабельная катушка; -
Микрофон; -
Система освещения
Специальное оборудование *:
-
Ряд специальных захватных губок; -
Гидравлический тормоз; -
Эвакуатор; -
Прокатное устройство; -
Газоанализатор -
Набор электроинструментов (дрель / перфоратор, болгарка). -
Запечатанная коробка для фотографий; -
Комплект защитной брони.

Рис. 1.2. МРК-35 с вытянутым манипулятором.
1.4. Основополагающая информация о робототехнике.
История робототехники насчитывает несколько веков и включает в себя эпоху творений инженерной механики - «чудесных машин», затем гуманоидных машин (антропоморфных), промышленной робототехники с программным управлением, с обратной связью с окружающей средой, бытовой техники и досуга. , медицинские техники. Развитие науки и технологий, потребность в новых технологиях для гражданского и военного применения привели к созданию сложных робототехнических систем и комплексов. К середине прошлого века концепция охватывала беспилотные (беспилотные) мобильные системы, которые работают в космосе и атмосфере, на суше, на море и под водой и которые находятся в стадии разработки и использования во многих странах.
В России всегда уделялось большое внимание исследованиям в области специальной робототехники. Напомним, что среди выдающихся достижений отечественной науки и техники мировым приоритетом является опциональный пилотируемый космический корабль «Буран» с двумя промежуточными орбитами, телеуправляемый космический корабль «Луноход-1».
Орбитальный космический корабль (КА) "Буран" входил в состав отечественной многоразовой космической системы, состоящей из ракеты-носителя "Энергия" и орбитального КА "Буран". Система была запущена 15 ноября 1988 года после того, как «Буран» совершил автоматический орбитальный полет продолжительностью 3 часа 26 минут и автоматически приземлился на взлетно-посадочной полосе «Самолет» космодрома. «Буран» выполнен по схеме самолета («бесхвостый»), масса - до 105 тонн, масса доставленного на орбиту груза - 30 тонн, в перевернутом состоянии - до 15 тонн, длина - 36,4 м. высота - 16,5. м, размах крыла - около 24 м, экипаж - 10 человек, расчетное время полета - до 30 суток.
Луноход-1 - первый советский беспилотный летательный аппарат в космонавтике, способный самостоятельно перемещаться по лунной поверхности. Аппарат проработал на поверхности Луны с 17 ноября 1970 года по 4 октября 1971 года. Луноход весит 756 кг, шасси восьмиколесное, имеет две передачи переднего и заднего хода, вращается в движении и на месте, питается от солнечных батарей. элементы и резервные батареи. Дистанционное управление движением «Лунохода» осуществлялось радиоуправлением с земли (капитан, водитель, штурман, оператор, бортинженер) с использованием данных телеметрии и телеметрии по крену, дифференциалу и пройденному расстоянию. Полезная нагрузка - научное оборудование. Пройденное расстояние - 10 540 м, измеренная площадь - 80 000 м². На Землю передан большой объем научной информации, более 200 панорам и 20 000 изображений поверхности.
В настоящее время ведутся работы по созданию и использованию робототехнических комплексов в вооруженных силах в соответствии с глобальной программой целей «Роботизация - 2020» - «Совместная программа по созданию комплексов с беспилотными летательными аппаратами, роботизированными системами на земле и морским роботом». ». Система для Вооруженных Сил Российской Федерации на 2011-2020 годы »и« Концепция использования комплексов с беспилотными летательными аппаратами в Вооруженных Силах Российской Федерации на период до 2025 года ». Минобороны Российской Федерации в г. В Российской Федерации по распоряжению правительства главный научно-исследовательский и испытательный центр робототехники является головной организацией по созданию и использованию военной робототехники.
1.5. Факторы, определяющие необходимость создании мобильных мехатронных роботов.
-
Повышение ценности человеческой жизни, затрат и обучения для содержания военнослужащих; -
Растущая потребность в повышении степени автоматизации перспективного оружия, вызванная неблагоприятным влиянием человеческого фактора в реальных боевых условиях из-за стрессовых ситуаций, утомляемости боевых групп (расчетов), невозможности оперативной обработки боевыми группами (бригадами). большого количества информации, нехватки времени для принятия решений - и исполнительных действий, ограниченных физиологическими возможностями человека; -
Наличие ряда боевых задач, решение которых связано со значительным риском для жизни и здоровья личного состава. В эти задачи входит централизованный сбор и обработка информации о радиационном и химическом загрязнении земель и объектов, выявление и оценка масштабов и последствий применения противником оружия массового поражения и т. Д. -
Возникновение ряда задач, которые невозможно решить без использования робототехнических средств, в частности - подводные работы на большой глубине, разведка в сильно загрязненных районах или в труднодоступных местах и т. Д. -
Возможность обновления большого количества используемого оружия и военной техники. Оснащенные модульным бортовым оборудованием, изготовленным с использованием военной робототехники, они приобретают новые качества и могут эффективно решать боевые и вспомогательные задачи при ведении боевых действий; -
Общность типичных задач робототехники, таких как радиационный, химический и бактериологический контроль, мониторинг окружающей среды, сбор, обработка опасных отходов, дегазация, дезактивация, дезинфекция оборудования и помещений, захоронение отходов в зонах уничтожения, тушение пожаров, защита удобства. , выполнение различных технико-технических работ для решения военных и экономических задач.
С 2011 года количество только БЛА в Вооруженных Силах РФ воз- росло в девять раз, наземных роботов – втрое, морских – вчетверо.
РАЗДЕЛ 2. РАСЧЁТ И ПРОЕКТИРОВАНИЕ МАНИПУЛЯТОРА МОБИЛЬНОГО РОБОТА-СПАСАТЕЛЯ.
В разделе 2 будет рассмотрен проект модификации робота-спасателя МРК-15 разработки СКТБ «ПР», которого можно дооснастить интерактивной человекоподобной рукой-манипулятором, который может стать выставочным экспонатом, или же примером возможностей Специального Конструкторского Бюро «Прикладной Робототехники».
Стоит отметить, что расчёты манипулятора, длины его стрелы и параметры захвата были расчитаны, исходя из размеров изучаемого робота МРК-35, разработки СКТБ «ПР».
Так как точных параметров данного робота в интернете нет, будем руководствоваться визуальными формами данного комплекса.

Рис. 1.3. Робот МРК-35 за работой, во время военных учений.
Как видно на картинке выше, обезвреживаемое устройство, размером примерно 500 мм, примерно в 4 раза меньше самого робота, следовательно, робототехнический комплекс МРК-35, около 2 метров в длину и 70-80 см в ширину.
Манипулятор будем рассчитывать из умозаключений о том, что безопасное расстояние от основания робота до обезвреживаемого опасного объекта примерно равна 1,5-2 длинам данного робота.
Следовательно, будем рассчитывать манипулятор, с длиной стрелы 3,5-4 метра; так же, расчёт гидроцилиндров, параметров конструкции данного манипулятора будут рассчитываться, исходя из этих данных.
2.1 Выбор и обоснование конструкции.
Разработанный манипулятор основан на легко проходимом мобильном спасательном роботе, в частности на платформе МРК-35, разработанной СКТБ «ПР».
Использование робототехники сокращает количество машин, используемых для аварийного реагирования, что значительно снижает стоимость спасательных операций, ускоряет их выполнение и снижает потребность в рабочей силе.
Как правило, в таких работах используется больше оборудования, потому что технология сокращается из-за стесненных условий и требуется четкая организация. При этом неизбежна потеря производительности оборудования, а это означает увеличение сроков спасения и ухудшение состояния пострадавших.
Использование многофункционального манипулятора со сменными рабочими органами позволяет избежать этих негативных факторов. В качестве базовых могут использоваться специальные высокоскоростные автомобили, которые позволяют работать с манипулятором в сложных климатических условиях.
Эти обстоятельства заставляют искать новые принципы построения транспортных машин, в том числе основанных на роботах.
В настоящее время ежедневно внедряется большое количество роботизированных систем, начиная от промышленности и заканчивая повседневной жизнью человека (использование роботов-пылесосов и внедрение умных домов). Теоретические и экспериментальные исследования показывают, что мобильные роботы могут быть лишены недостатков, присущих крупногабаритной колесной и гусеничной технике.
Еще одно важное преимущество роботов связано с их энергоэффективностью. Когда автомобиль находится в движении, расходуется энергия, которая в конечном итоге используется для постоянной деформации земли. Если теперь учесть, что колесные и гусеничные машины образуют более глубокий путь, а роботы практически не влияют на землю даже при прохождении колонны в несколько сотен единиц, то предложение снизить энергопотребление при рациональном движении рационально. . роботизированные машины полностью себя оправдывают.
В то же время опыт, накопленный при изучении динамических характеристик движения робототехнических комплексов, выявляет ряд факторов, препятствующих принудительному внедрению роботов в различные сферы народного хозяйства. Наиболее важными из них являются относительно сложная конструкция и, как следствие, низкая надежность и низкая скорость движения из-за высоких динамических нагрузок, действующих на корпус робота и его привод на высоких скоростях. Однако, не игнорируя эти факторы, следует иметь в виду, что усложнение всей конструкции - это объективная закономерность развития технологий, и организации движения в частности. С другой стороны, есть национальная сложность для разных отраслей. В сельском хозяйстве для проведения технологических операций на относительно ровной поверхности достаточно передать их роботам, сохранив принципы управления колесной и гусеничной техникой.
Преимущества роботов определяют интерес, проявляемый исследователями всего мира в последние десятилетия к проблемам развития шагающих манипуляторов. Сегодня робототехнические системы широко используются во многих областях человеческой деятельности. Поэтому идея использования роботов в военных целях очень популярна. Роботизированные системы будут использоваться для перевозки грузов, наблюдения за последствиями ядерных, химических и биологических атак, для разведки, установки противодымной защиты, демонтажа разрушенных зданий и проведения спасательных операций в городах после взрыва атомной бомбы или стихийных бедствий. катастрофы при транспортировке боеприпасов к огневым пунктам и работе на складах боеприпасов при демонтаже и удалении объектов.