Файл: Контрольная работа по дисциплине Системы и сети передачи дискретных сообщений Вариант 5 ст гр. Ткз18 (группа).docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.02.2024
Просмотров: 44
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Забайкальский государственный университет»
(ФГБОУ ВО «ЗабГУ»)
Факультет энергетический
Кафедра физики и техники связи
КОНТРОЛЬНАЯ РАБОТА
по дисциплине: «Системы и сети передачи дискретных сообщений»
Вариант 5
Выполнил: ст. гр. ТКз-18
(группа)
Лагодин А.А.
(фамилия, инициалы)
Проверил: доцент Таланов С.Б
(должность, ученая степень, звание,
фамилия, инициалы)
Чита
2022
1.1.Назначение и виды синхронизации
Синхронизация в цифровых системах связи предназначена для обеспечения синфазного начала обработки элементов цифрового сигнала и однозначного распределения кодовых комбинаций по адресатам. Необходимость синхронизации обусловлена недостаточной стабильностью тактовых частот передатчика,приемника и изменения времени распространения сигнала между абонентами.
Виды синхронизации подразделяются следующим образом:
1) тактовая синхронизация - фиксируются моменты окончания элементов кодовых комбинаций;
2) цикловая синхронизация - фиксируется начало и конец кодовых комбинаций;
3) синхронизация по кадрам (групповая синхронизация) - распределение кодовых комбинаций по адресатам.
Примечание. В когерентных системах связи также выполняется синхронизация по фазе опорного сигнала.
Основные характеристики системы синхронизации:
1) время достижения (поиска)синхронизма;
2) вероятность срыва синхронизации;
3) время поддержания синхронизма при пропадании сигнала на входе;
4) вероятность ложной синхронизации при заданном времени анализа.
1.2.Тактовая синхронизация
Тактовая синхронизация обеспечивает синфазную обработку элементов цифрового сигнала. Генератор тактовых импульсов на передающей стороне обеспечивают требуемый период следования элементов цифрового сигнала. На приемной стороне тактовые импульсы управляют работой ключа в схемах приема цифровых сигналов (см. рис.). Погрешность тактовой синхронизации приводит к тому, что моменты замыкания ключа в схеме приема не соответствуют моментам окончания элементов кодовых комбинаций. Допустимая погрешность тактовой синхронизации составляет 0,03 - 0,05 от длительности элемента цифрового сигнала
э.
Различают автономную и принудительную тактовую синхронизацию. При автономной синхронизации в начале сеанса связи передается специальный синхронизирующий сигнал и по нему осуществляется вход в синхронизм. Дальше работа устройства синхронизации осуществляется в автономном режиме. После прекращения синхронизации между колебаниями тактовых генераторов на передающей и приемной сторонах возникает фазовый сдвиг, обусловленный их нестабильностью, которая стечением времени возрастает и может превысить допустимые пределы. Определим, какое количество элементов цифрового сигналаnможно передавать в автономном режиме, не превысив допустимый фазовый сдвиг.
Относительный фазовый сдвиг за время одного такта (длительности одного элемента)
где =f / fт -относительная нестабильность частот тактовых генераторов,f - учитывает уход частоты тактовых генераторовfткак на приемной, так и передающей сторонах. Фазовый сдвиг заn тактов
Предельное значение n = , и с учетом (7.2) допустимое количество элементов цифрового сигнала, передаваемых в автономном режиме
Например, если =10-8, то количество элементов цифрового сигнала, передаваемых в автономном режиме n=(3-5)106.
Принудительная синхронизация обеспечивает постоянную регулировку тактовой частоты. Синхронизация может осуществляться по специальным импульсам тактовой синхронизации, однако на практике сведения о тактовой частоте чаще извлекается из передаваемой информационной последовательности с использованием демодуляторов цифрового сигнала без синхронизации. Структурная схема демодулятора ЧМн сигналов без синхронизации приведена на рис.1.1.
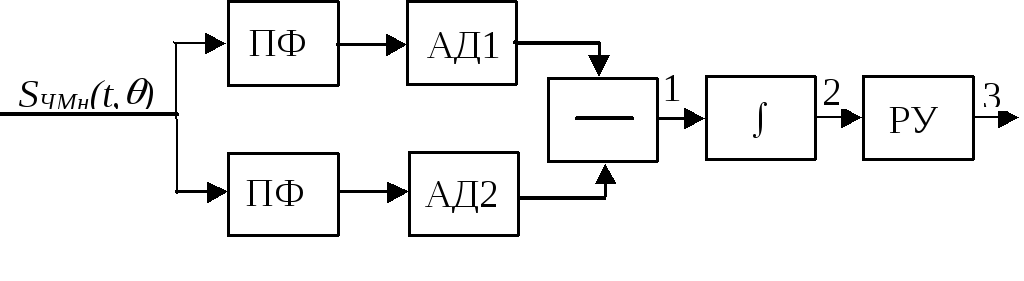
Рис.1.1. Демодулятор цифрового сигнала без синхронизации
На выходе вычитающего устройства формируется биполярный сигнал, поступающий после интегратора на вход решающего РУ с порогом h=0. В момент достижения сигналом порогового уровня на выходе решающего устройства вырабатывается тактовый импульс, смещенный относительно начала элементов на половину длительности элемента. Процесс формирования тактовых импульсов с использованием демодулятора ЧМн сигнала без синхронизации поясняется на рис.1.2.
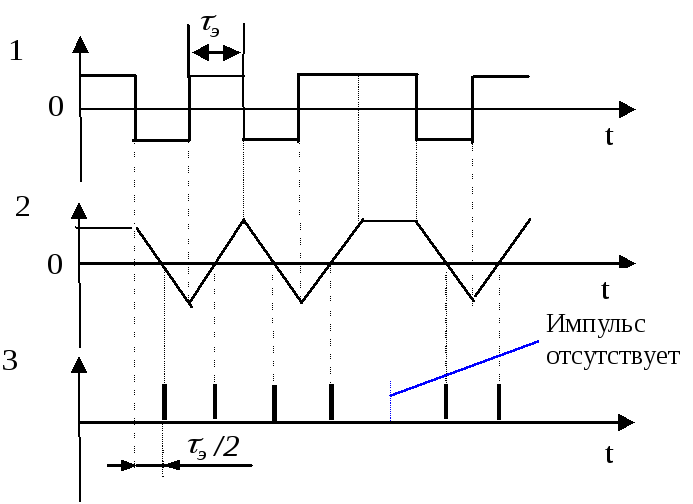
Рис.1.2. Процесс формирования тактовых импульсов на основе демодулятора ЧМн сигналов без синхронизации
Недостатком такого способа формирования тактовой последовательности является отсутствие импульсов на интервале группирования элементов одного знака в передаваемой информационной последовательности.
Для увеличения точности синхронизации, окончательная оценка фазы тактовой частоты, может производится по ряду измерений в следящем фильтре.
Следящие фильтры подразделяются на схемыс непосредственным воздействием и без непосредственного воздействия на генератор.
Структурная схема следящего фильтра с непосредственным воздействиена генератор представлена на рис.1.3.

Рис.1.3.. Структурная схема следящего фильтра с непосредственным воздействия на генератор
На вход фазового детектора ФД поступают тактовые импульсы 1сформированные, например, демодулятором ЧМн сигналов без синхронизации или же демодулятором специальных импульсов тактовой синхронизации (рис.1.4). Сигнал с выхода фазового детектора, пропорциональный фазовому сдвигу, между последовательностями1и 2, воздействует через фильтр нижних частот ФНЧ и управляющий элемент УЭ на генератор тактовых импульсов ГТИ, подстраивая его таким образом, чтобы свести рассогласование по фазе к минимуму.
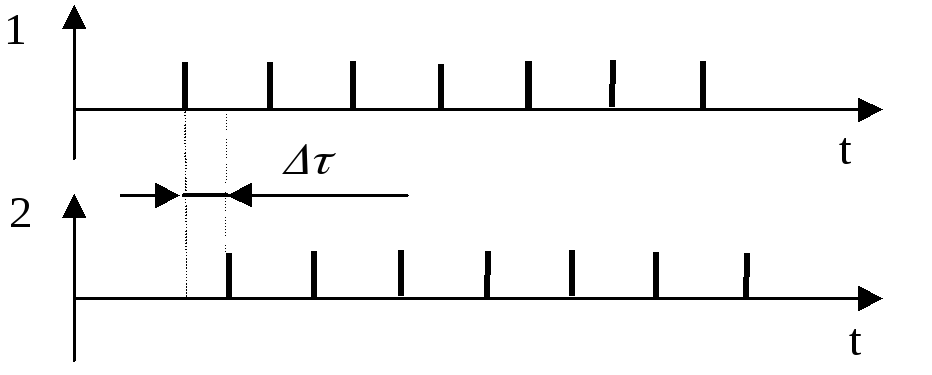
Рис.1.4. .Формирование тактовых импульсов на основе следящего фильтра с непосредственным воздействием на генератор
Недостатком такой схемы следящего фильтра является низкая стабильность частоты подстраиваемого ГТИ из-за непосредственного воздействия на генератор.
Схема следящего фильтра без непосредственного воздействия на генераторпредставлена на рис.1.5.
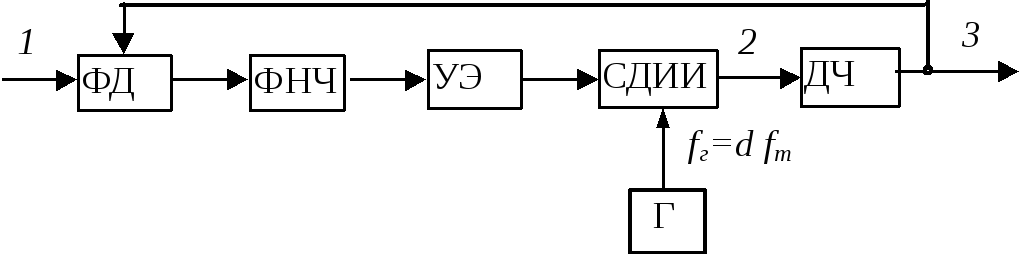
Рис.1.5. Структурная схема следящего фильтра без непосредственного воздействия на генератор
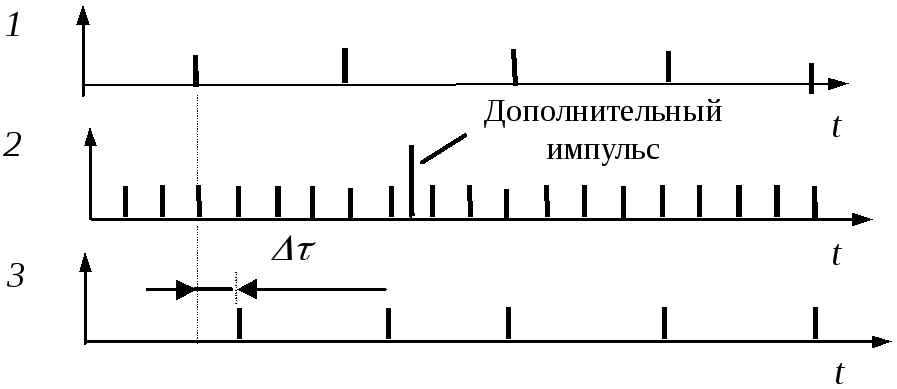
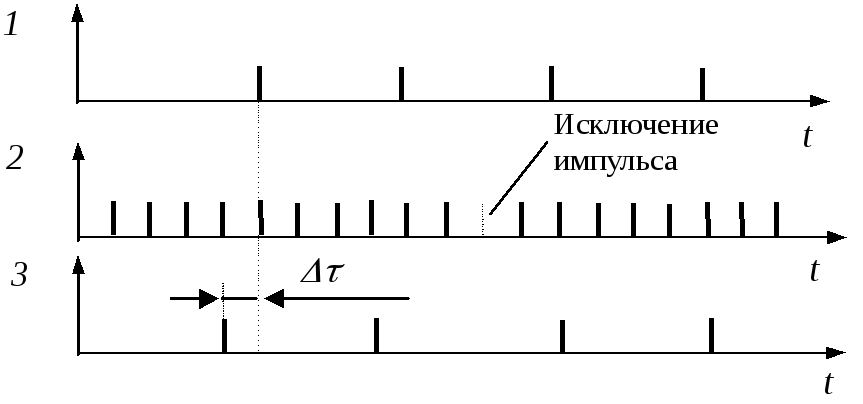
Генератор Г формирует последовательность импульсов с частотой в dраз выше тактовой частотыfт. Делитель частоты ДЧ с коэффициентом деленияd преобразует частоту генератораfгк тактовой частоте. Сигнал с выхода ФД воздействует через ФНЧ и УЭ на схему добавления и вычитания импульсов СДИИ и в зависимости от знака рассогласования в СДИИ добавляется или исключается один импульс, что приводит к сдвигу тактовой последовательности на выходе ДЧ влево или вправо на величинуэ /d. Графики, поясняющие принцип функционирования схемы следящего фильтра без непосредственного воздействия на генератор, приведены на рис.1.6.
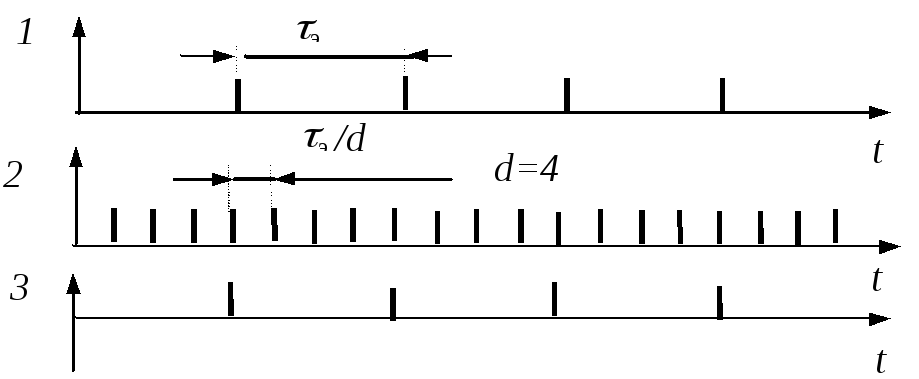
Фазовый сдвиг между последовательностями 1 и 3 отсутствует
Смещение последовательности 1 относительно последовательности 3 на величину влево
Смещение последовательности 1 относительно последовательности 3 на величину вправо
Рис.1.6. Формирование тактовых импульсов на основе схемы следящего фильтра без непосредственного воздействия на генератор
В следствии того, что непосредственного воздействия на ГТИ на происходит стабильность тактовой частоты не понижается и время установления синхронизации уменьшается. При том, чем выше частота генератора Г, тем точнее может осуществляться настройка.
1.3.Цикловая синхронизация
Устройство цикловой синхронизации (УЦС) предназначено для определения начала и конца кодового слова (кодовой комбинации) синхронизации. Цикловая синхронизация обеспечивается либо с помощью специальных сигналов, либо с помощью внутренней избыточности кодовых слов. То есть в обоих случаях цикловая синхронизация реализуется за счет понижения скорости передачи информации.
В качестве циклового синхросигнала можно использовать периодически повторяющиеся от слова к слову сосредоточенные или распределенные синхрогруппы. На приемной стороне синхросигнал, генерируемый местным генератором МГ, сравнивается со входной последовательностью элементов при различных взаимных временных положениях. Совпадение элементов принимаемого и опорного сигналов во времени фиксируется как режим синхронизма. Наиболее просто реализуется цикловая синхронизация при передаче одноэлементного синхросигнала в начале кодового слова (рис.1.7) или группы кодовых слов.
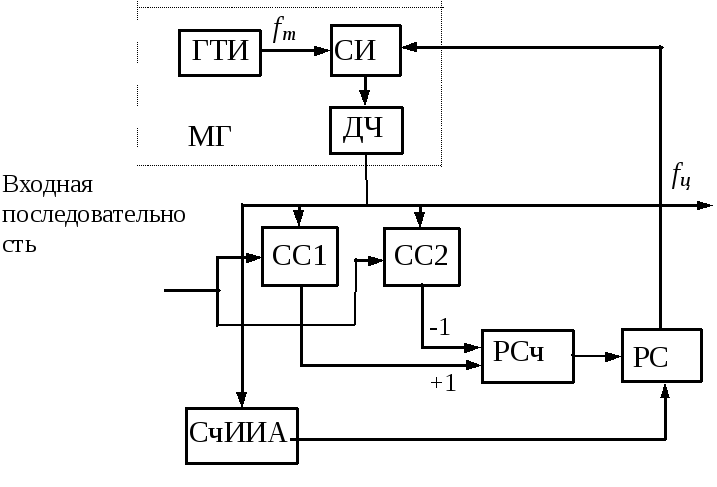
Рис.1.7. Структурная схема устройства цикловой синхронизации, реализующего шаговый поиск одноэлементного синхросигнала
Импульсы с частотой следованиякодовых комбинацийfц, формируемые с помощью делителя частоты ДЧ и схемы исключения импульса СИИ из тактовой частотыfт, подаются на схемы совпадения СС1 и СС2, на другие входы которых поступают элементы передаваемой последовательности. В зависимости от знака этих элементов на реверсивный счетчик РСч поступают импульсы по одному из двух входов: суммирующему+1, если знак совпадает со знаком синхроэлемента и вычитающему-1, если знак не совпадает. Счетчик импульсов интервала анализа СчИИА определяет отрезок времени длиной в несколько слов, через который число, записанное в реверсивный счетчик, сравнивается с порогом в решающей схеме РС. Если порог не превышен, то в решающей схеме формируется строб, которым с помощью схемы исключения импульса вычеркивается один из подаваемых на ДЧ тактовых импульсов и точка анализа синхронизации в кодовом слове смещается на один символ.
Устройства цикловой синхронизации могут находиться либо в режиме поиска синхронизации (входа в синхронизм), либо в установившемся режиме контроля за появлением элементов синхросигнала на синхропозиции цикла.
Важной характеристикой устройства цикловой синхронизации является среднее время установления синхронизма Тп (время поиска). Процесс поиска позиции на которой передается синхросигнал, продолжается до тех пор, пока единица не повторится на проверяемой позиции требуемое число раз