ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 10.10.2024
Просмотров: 13
Скачиваний: 0
ЛАБОРАТОРНАЯ РАБОТА № 9
ИССЛЕДОВАНИЕ ТИПОВОЙ СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА ПОДЪЁМНО КРАНОВОГО МЕХАНИЗМА
ЦЕЛЬ РАБОТЫ. Изучить принцип действия и исследовать работу одной из типовых схем управления электроприводом подъёмно - кранового механизма с ДПТ независимого возбуждения.
ПРОГРАММА РАБОТЫ.
1. Ознакомиться с электрооборудованием типового шкафа управления.
2. Исследовать работу схемы управления электроприводом подъёмно – кранового механизма.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ
На рис.9.2 приведена типовая принципиальная схема шкафа управления электроприводом подъемно-кранового механизма с ДПТ независимого возбуждения. Схема позволяет осуществить реверсивное включение электродвигателя для подъема и опускания груза. Управление осуществляется оператором при помощи командоконтроллера SAl. В схеме предусмотрена автоматизация процесса пуска ДПТ в функции времени, защита от самозапуска, осуществление режима динамического торможения, защита от преждевременного шунтирования пускового реостата, защита электродвигателя и механизма от недопустимых перегрузок, двухступенчатое регулирование скорости при подъеме и опускании груза.
Командоконтролер SA1 имеет семь фиксируемых положений, соответствующих следующим командам управления:
"О" - подача питания на схему, режим динамического торможения электродвигателя при его отключении;
"1В" - торможение включено, электропривод подготовлен для подъема груза:
"2В" - подъем груза на малой скорости;
"ЗВ"- подъем груза на большой скорости;
"1Н" - торможение выключено, электропривод подготовлен для опускания груза:
"2Н" - опускание груза на малой скорости;
"ЗН" - опускание груза на большой скорости.
Для автоматического управления пуском ДПТ в функции времени в данной схеме применяются таймтакторы, представляющие собой совокупность контактора и электромагнитного реле времени в одном устройстве. Катушки, принадлежащие одному таймтактору, объединены пунктирной линией.
При подаче напряжения питания на схему управления автоматическим выключателем QF1 в положении командоконтроллера "О" получают питание промежуточные реле KL1, KL2 и катушка реле времени КТ1 таймтактора. Реле KL1, шунтируя контакт командоконтроллера, замкнутый в положении "О", встает на самоблокировку. Реле KL2 подключает обмотку возбуждения LМ электродвигателя к сети и подготавливает к включению цепи питания катушек КТ2, КТЗ и КМ8.
Обмотка якоря электродвигателя М через размыкающий контакт КМ8 подключена к реостату R4 для осуществления режима динамического торможения.
При переключении командоконтроллерав положение "1В" получают питание катушки реле времени КТ2, КТ3 таймтактора и катушка контактора КМ8. Контакт КМ8 отключает обмотку якоря от сопротивления R4 и выключает режим динамического торможения.
При переключении командоконтроллера в положение "2В" получают питание контакторы КМ1 и КМ2. На якорь электродвигателя подается напряжение сети прямой полярности при включенном пусковом реостате. Контакт КМ1 блокирует включение контакторов КМЗ и КМ4, а контакт КМ2 обесточивает катушку КТ1. Электродвигатель М, подключенный к сети через все ступени пускового реостата, осуществляет подъем груза с малой скоростью, работая на реостатной характеристике.
При переключении командоконтроллерав положение "ЗВ" получает питание катушка контактора КМ5 через замкнувшийся с выдержкой времени контакт КТ1. Силовой контакт КМ5 шунтирует первую ступень R1 пускового реостата, а блокировочный обесточивает катушку КТ2. Через выдержку времени КТ2 включает КМ6. Силовой контакт КМ6 шунтирует вторую ступень R2 пускового реостата, а блокировочный обесточивает катушку КТЗ. Через очередную выдержку времени КТЗ включает контактор КМ7, контакты которого шунтируют последнюю ступень R3 пускового реостата. После чего происходит подъем груза с большой скоростью, электродвигатель работает на естественной характеристике.
Аналогично схема управления работает при перемещении командоконтроллера SA1 в положения "1Н","2Н" и "ЗН". В этом случае получают питание контакторы КМЗ и КМ4, обеспечивая подключение якоря электродвигателя к напряжению обратной полярности, что соответствует режиму спуска груза. Реле тока КА2 предотвращает преждевременное шунтирование двух последних ступеней (R2 и R3) пускового реостата, если ток двигателя при работе на предыдущей ступени не снизился до определенной минимальной величины. Реле тока КА1 осуществляет защиту электродвигателя и механизма от перегрузок в случае, если груз превышает допустимую норму, либо возникает зацеп или заклинивание груза. При этом контакт КА1 обесточивает реле KL1, в результате чего отключается вся схема управления и электродвигатель от сети. Дальнейшая работа возможна только после возвращения командоконтроллера в положение "О".
В схеме применен ряд внутренних защитных блокировок. Во избежание одновременного включения реверсивных пар линейных контакторов, помимо взаимной электрической блокировки с помощью размыкающих контактов КМ1 и КМЗ, применена механическая блокировка, препятствующая одновременному втягиванию сердечников контакторов разной полярности. Блокировочный замыкающий контакт КМ8 препятствует шунтированию последних двух ступеней (R2 и R3) пускового реостата при неразомкнувшемся силовом контакте КМ8 в цепи R4. Блокировочный контакт KL1 осуществляет защиту от самозапуска электродвигателя при включении питания в положении командоконтроллера, отличном от "О".
УКАЗАНИЯ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
1. Изучить принцип действия схемы управления электроприводом подъемно-кранового механизма.
2. Найти в шкафу все аппараты схемы управления.
3. Включить стенд и исследовать работу схемы управления.
4. Проверить действие зашиты от самозапуска электродвигателя.
СОДЕРЖАНИЕ ОТЧЕТА
1. Вычертить принципиальную электрическую схему управления электроприводом подъемно-кранового механизма.
2. Построить пусковую диаграмму.
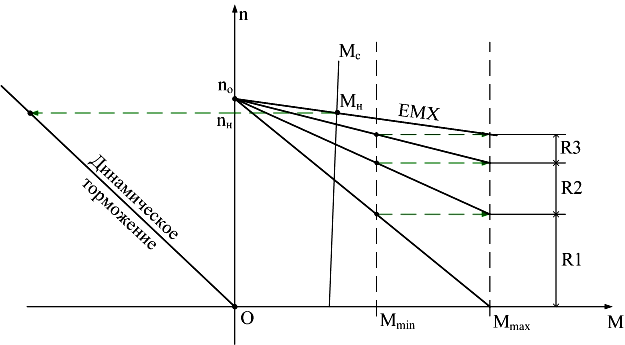
Рис.9.1. Пусковая диаграмма электропривода подъёмно – кранового механизма.
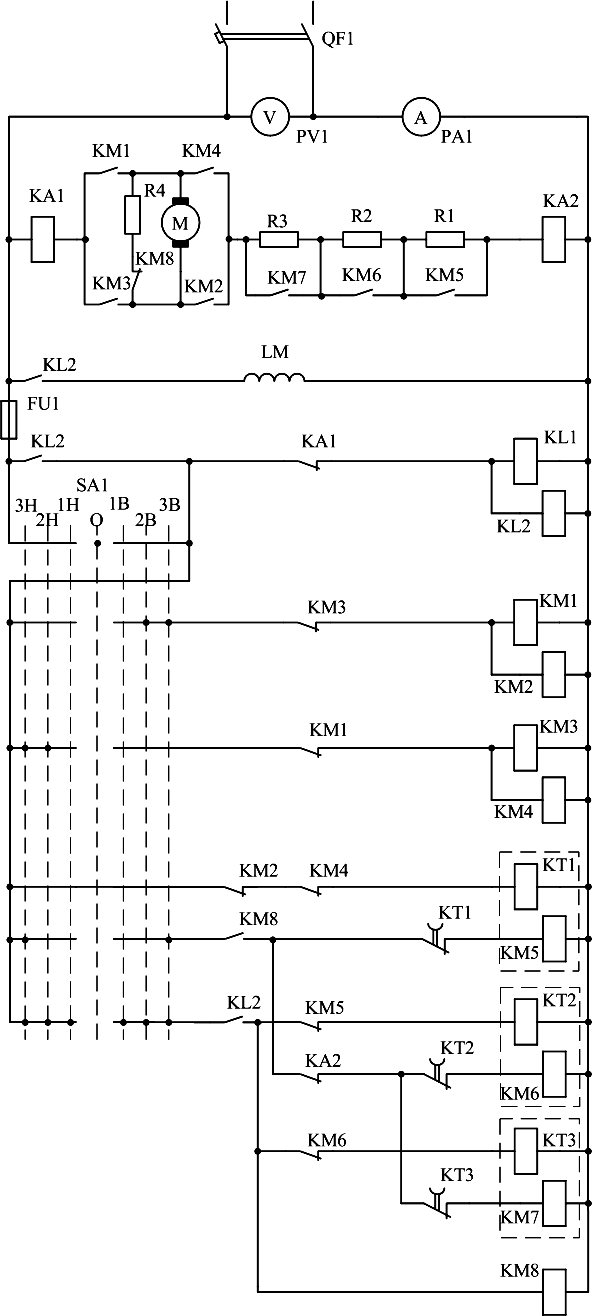
Рис.9.2. Типовая принципиальная схема шкафа управления электроприводом подъемно-кранового механизма с ДПТ независимого возбуждения