ВУЗ: Смоленский областной казачий институт промышленных технологий и бизнеса
Категория: Лекция
Дисциплина: Технические измерения и приборы
Добавлен: 29.10.2018
Просмотров: 758
Скачиваний: 18
ГЛАВА 3. ВИДЫ ДАТЧИКОВ
3.1. Бинарные и цифровые датчики
В системах управления последовательностью событий в основном применяются сигналы типа «включено/выключено», вырабатываемые бинарными датчиками. В любом производственном процессе приходится контролировать тысячи условий типа «включено/выключено».
Бинарные датчики используются для определения положения при механических перемещениях, для подсчета элементов в дискретных потоках (например, числа бутылок на выходе линии розлива), для контроля достижения предельных значений уровня или давления или крайних положений подвижных частей.
Бинарные и цифровые датчики бывают как простыми, состоящими только из выключателя, так и очень сложными. Некоторые цифровые датчики в действительности представляют собой полнофункциональный микрокомпьютер, встроенный в автономное устройство и вырабатывающий либо сигналы типа «включено/выключено», либо кодированные цифровые данные. Ниже описаны некоторые типы датчиков с бинарным выходом – положения, пороговые и датчики уровня.
3.2. Датчики положения
В качестве датчиков положения (position sensor) в течение многих десятилетий используются выключатели. Они состоят из электрических контактов, которые механически размыкаются или замыкаются, когда какая-либо переменная (положение, уровень) достигает определенного значения. Концевые выключатели (limit switch) различных типов являются важной частью многих систем управления, надежность которых существенно зависит именно от них. Они располагаются там, где «происходит действие», и часто подвергаются большим механическим нагрузкам и токам.
На рис. 3.1 показаны нормально разомкнутый замыкающий выключатель (normally open, make-contact switch), нормально замкнутый размыкающий выключатель (normally closed, break-contact switch) и переключатель (change-over switch) в нормальном положении и при срабатывании. На схемах контакты выключателя обычно изображают в нормальном положении.
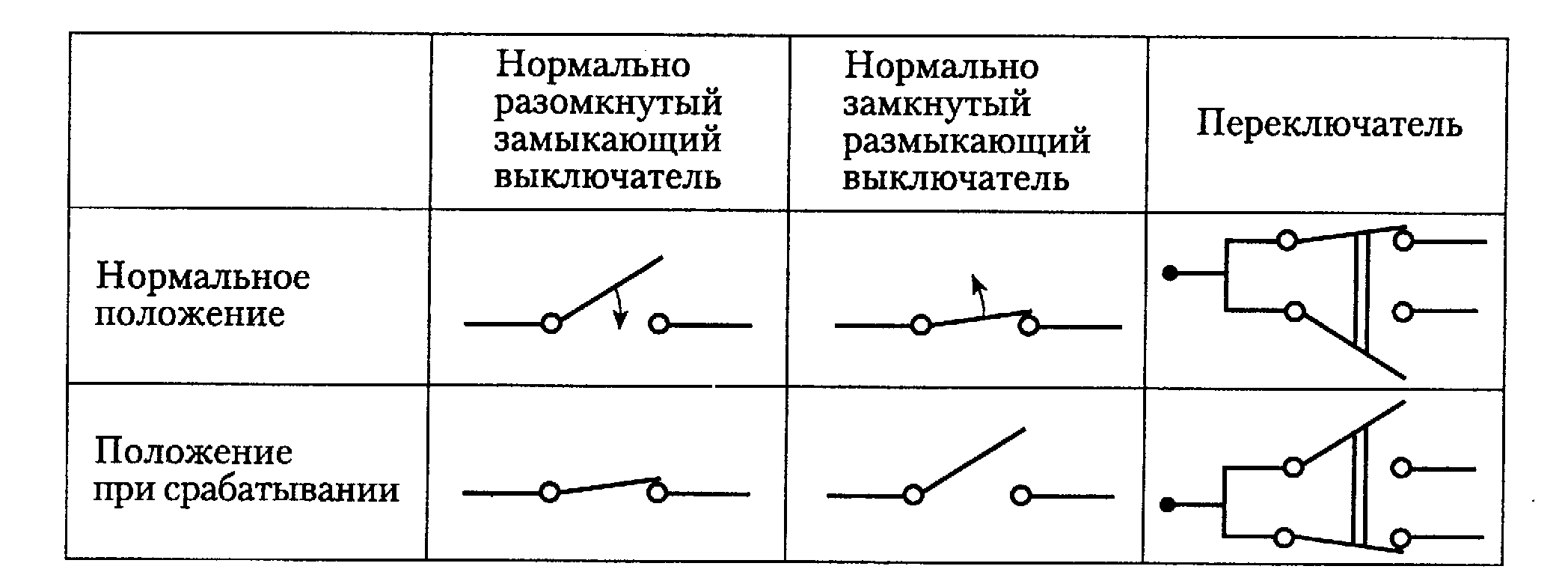
Рис. 3.1. Различные обозначения выключателей.
Простейшим выключателем является механический нормально разомкнутый однополюсный выключатель (Single-Pole Single-Throw – SPST), показанный на рис. 3.2 а. Простое согласование сигналов можно обеспечить с помощью нагрузочного (pull-up) резистора. Когда выключатель разомкнут, с резистора снимается напряжение +5 В, воспринимаемое ТТЛ-вентилем на входе компьютера как одно из логических состояний. Если контакт замкнут, выходной сигнал равен потенциалу «земли», что воспринимается как другое логическое состояние.
Замыкание механического выключателя обычно вызывает проблемы, поскольку контакты вибрируют («дребезжат») несколько миллисекунд, прежде чем замкнуться (рис. 3.2 б). Когда важно зафиксировать только первое касание, как в случае концевого выключателя, принимать во внимание последующие замыкания и размыкания контактов из-за дребезжания нет необходимости. Применение цепи, обеспечивающей небольшое запаздывание выходного сигнала, является одним из способов преодоления эффекта дребезжания контактов.
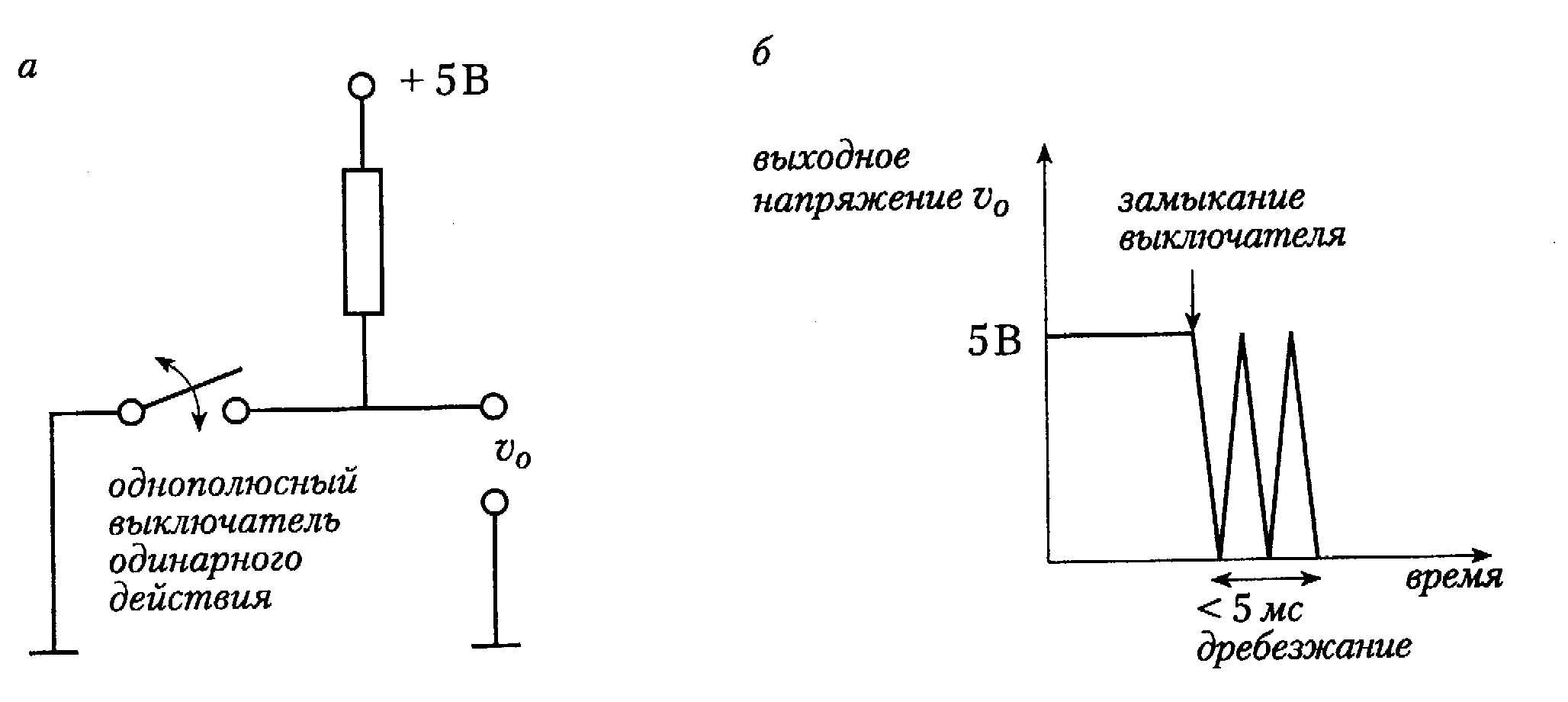
Рис.3.2. Дребезжание контактов при замыкании выключателя.
Однополюсный двухпозиционный выключатель (Single-Pole Double-Throw – SPDT) может быть типа «разрыв перед замыканием» (Break-Before-Make – ВВМ) или «замыкание перед разрывом» (Make-Before-Break – МВВ) (рис. 3.3). При переключении в первом случае оба контакта разомкнуты на короткое время, во втором – через оба контакта ток кратковременно протекает.
Бороться с дребезжанием контактов в переключателях SPDT можно с помощью специальных схем. Подвижный контакт должен быть заземлен; когда он касается контакта, присоединенного к источнику, напряжение последнего снижается. Подключенная электронная схема должна «уловить» логическое состояние, соответствующее первому касанию контактов, и игнорировать последующее дребезжание.
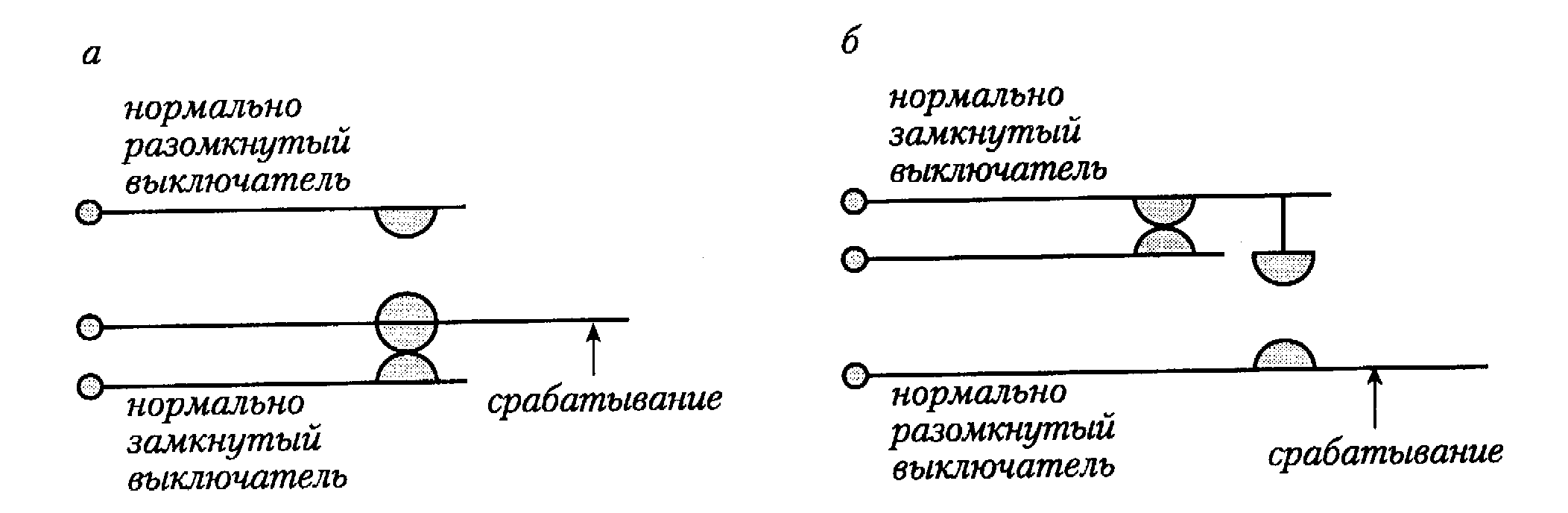
Рис. 3.3. Переключатели с различными контактными системами:
а – разрыв перед замыканием, б – замыкание перед разрывом.
Существуют другие методы определения положения с помощью бинарных датчиков, некоторые из которых приведены ниже.
• Ртутные выключатели состоят из небольших герметически запаянных стеклянных трубок с контактными выводами. Трубка содержит достаточное количество ртути, чтобы замкнуть контакты. Выключатель размыкает и замыкает контакты при изменении положения (наклона) трубки.
• Магнитоуправляемое герметичное язычковое реле – геркон (reed switch, reed relay) – состоит из двух плоских пружин, запаянных в небольшую стеклянную трубку. Свободные концы пружин находятся друг над другом с очень небольшим зазором между ними. Когда к трубке приближается магнит, пружины намагничиваются в разных направлениях, притягиваются друг к другу и замыкаются.
• Фотоэлектрические датчики выполнены из материалов, которые изменяют сопротивление или генерируют разность потенциалов под влиянием света. Во многих устройствах достаточно бинарной индикации – есть свет или нет. Фотоэлектрический лучевой детектор состоит из источника светового луча и светочувствительного элемента. Существует много конструкций светодетекторов, которые отличаются в основном тем, отражается или прерывается световой луч фиксируемым объектом. Преимущества светодетекторов – простота, гибкость, низкая стоимость и, главное, фиксация может выполняться без непосредственного физического контакта. На базе фотоэлектрических лучевых детекторов легко строятся измерители частоты вращения, счетчики, датчики положения и т. д.
• Ультразвуковые и микроволновые датчики используются для обнаружения объектов на расстояниях от нескольких сантиметров до нескольких метров. Эти датчики работают в режиме отражения (излучатель и приемник заключены в одном приборе) или на принципе прерывания луча (излучатель и приемник расположены в разных устройствах).
3.3. Пороговые датчики
Разные типы датчиков используются для определения момента, когда аналоговая величина (например, уровень, давление, температура или расход) достигает некоторого порогового значения. Поэтому их часто называют пороговыми датчиками (point sensors, limit sensors). Они обычно используются для подачи аварийного сигнала, а иногда и остановки процесса в случае достижения какой-либо величиной значения, указывающего на опасную ситуацию. Такие датчики должны быть устойчивыми и надежными.
3.4. Индикаторы уровня
Индикатор уровня (level switch) срабатывает, если резервуар заполнен до заданной высоты. Принцип работы зависит от свойств контролируемого вещества – жидкость, цементный раствор, гранулы или пыль. Индикатор может либо показывать текущий уровень, либо выдавать сигнал, когда уровень достигает заданного.
Поплавок, находящийся на поверхности жидкости, при достижении определенного уровня действует как концевой выключатель. Герконы являются идеальными выключателями для жидкой среды, поскольку они водонепроницаемы. На поплавке должен быть установлен магнит, чтобы вызвать срабатывание контактов геркона. Для той же цели часто используются фотоэлектрические датчики. Для твердых материалов применяются емкостные датчики приближения (proximity sensors). По мере повышения уровня заполнителя из пространства между стенкой сосуда и емкостным зондом вытесняется воздух, и поэтому изменяется емкость образованного ими конденсатора, которую можно измерить стандартными методами. Уровень можно измерить и датчиком давления, помещенным на дно сосуда, поскольку величина давления у дна прямо пропорциональна высоте столба вещества. В этом случае может вырабатываться как аналоговый (индикация текущего уровня), так и бинарный (достигнут пороговый уровень) сигнал.
3.5. Цифровые и информационно-цифровые датчики
Цифровые датчики генерируют дискретные выходные сигналы, например импульсные последовательности или представленные в определенном коде цифровые данные, которые непосредственно могут быть считаны процессором. В зависимости от типа датчика выходной сигнал либо сразу формируется в цифровом виде (например, от датчика положения вала), либо должен обрабатываться цепями электронной логики, которые обычно составляют с ним одно целое. Измерительная головка цифрового датчика такая же, как и у аналогового. Существуют интегрированные цифровые датчики, которые включают микропроцессоры для выполнения числовых преобразований и согласования сигнала и вырабатывают цифровой или аналоговый выходной сигнал.
Если выходной сигнал датчика представляет собой последовательность импульсов, то они обычно суммируются счетчиком. В другом варианте – можно измерять интервал между импульсами. Затем результат в виде цифрового слова передается на дальнейшую обработку. При измерении энергии информация обычно кодируется импульсами – каждый импульс соответствует определенному количеству энергии.
Информационно-цифровые датчики (Fieldbus sensor) дополнительно обеспечивают передачу информации через шины локального управления (Fieldbus), которые представляют собой специальный тип двухсторонних цифровых коммуникаций (глава 9). Датчики данного типа – это обычные датчики температуры, давления, расхода и т. д., которые дополнительно имеют микропроцессор для обработки данных, преобразования их в цифровой вид (например, в 12-разрядный код) и поддержки внешних коммуникаций. По шине можно передавать не только результаты измерений, но и идентификационную информацию датчика. Иногда такие датчики поддерживают режим удаленного тестирования и калибровки.
3.6. Датчики положения вала
Датчики положения вала или кодеры поворота (shaft encoders) – это цифровые датчики для измерения угла поворота и угловой скорости. Они применяются во всех системах, где нужна точная информация о параметрах вращательного движения, – например, станки, роботы, сервосистемы и электропривод. Существуют датчики относительного (incremental) и абсолютного (absolute) типов.
Датчик относительного типа состоит из светодетектора или магнитного датчика, например геркона, который генерирует последовательность импульсов при вращении объекта; поворот на 360° соответствует одному или более импульсам. Затем последовательность импульсов обрабатывается и преобразуется в угол поворота и угловую скорость объекта.
Датчик абсолютного типа выдает угол поворота объекта в двоичном коде. Оптический датчик состоит из диска с прорезями и светонепроницаемыми участками, причем каждая прорезь уникальна и соответствует определенному углу поворота. Источник света освещает одну сторону диска, а на другой стороне блок датчиков фиксирует световой шаблон (т. е. через какие прорези свет проходит, а через какие – нет), которому соответствует цифровое значение угла поворота. Кодирование обычно осуществляется на основе модифицированного двоичного алгоритма, чтобы минимизировать ошибки смещения фотоэлектрических датчиков относительно прорезей в диске. Эта простая технология обеспечивает высокие разрешение (которое определяется числом прорезей на градус углового смещения или на оборот диска) и точность, а также хорошую помехоустойчивость при передаче сигналов, поскольку не требует аналого-цифрового преобразования.
3.7. Аналоговые датчики
Выходной сигнал датчика подается на вход обрабатывающего устройства, например на входной порт компьютера. Поскольку характеристики выходного сигнала датчика и последующего каскада довольно часто отличаются друг от друга, то для передачи сигнала между ними должна использоваться некоторая согласующая цепь. Термин «согласующая цепь» (conditioning circuitry) является довольно общим и может обозначать любой набор электронных компонентов между измерительной головкой датчика и обрабатывающим устройством. Нельзя точно определить границу между электроникой измерительного преобразователя и последующими согласующими цепями – каждый раз она может трактоваться по-своему.
Большинство датчиков с преобразователем, применяемых в системах управления, генерируют аналоговый сигнал. Как правило, при управлении измеряются следующие физические величины:
- электрические и магнитные характеристики;
- параметры движения;
- сила, момент и давление;
- температура;
- уровень заполнения емкости;
- расход;
- плотность, вязкость и консистенция;
- концентрация (газа, жидкости, растворенных и взвешенных веществ);
- химическая или биохимическая активность.
Ниже представлен краткий обзор аналоговых датчиков, обычно используемых в системах управления. Измерение электрических величин – тока, напряжения, сопротивления, магнитного поля, излучения и мощности – краеугольный камень измерительных технологий. Для большинства типов измерений серийно выпускаются измерительные головки, датчики, включающие согласующие цепи и даже интегрированные устройства со встроенными аналогово-цифровыми преобразователями и средствами передачи данных.
3.8. Датчики движения
Датчики движения (motion sensors) измеряют четыре кинематические величины:
- перемещение (изменение положения, расстояния, степени приближения, размера);
- скорость (включая угловую);
- ускорение;
- удар.
Каждая из этих величин является производной по времени от предшествующей. Теоретически можно измерить только одну из них и затем получить остальные дифференцированием или интегрированием. На практике, однако, такой подход неприемлем из-за природы сигнала (постоянный, переходный и т. д.), частотного спектра, шумов и возможностей средств обработки данных.
Контроль параметров
движения обязателен для приложений, в
которых используется механическое
оборудование – сервосистемы, роботы,
электроприводы или другие манипуляторы.
Измерение перемещений применяется при
управлении положением клапанов. Толщина
пластин в прокатном стане постоянно
контролируется системой управления
калибровкой. Датчики
деформаций –
это устройства, которые измеряют
механическое напряжение, давление и
силу, но могут применяться и для измерения
перемещений. В системах мониторинга
состояния и предупреждения отказов
механического оборудования широко
используются акселерометры.
Для измерения параметров движения применяются следующие типы устройств:
- потенциометры для измерения перемещений; они работают как переменные резисторы;
- датчики на основе принципа электромагнитной индукции, например дифференциальные трансформаторы, резольверы, синхротрансформаторы (сельсины);
- емкостные датчики для измерения малых перемещений, вращении и уровней жидкости;
- пьезоэлектрические датчики для измерения давления, напряжения, ускорения, скорости, силы и момента (пьезоэлектрический материал деформируется под действием приложенной разности потенциалов или вырабатывает разность потенциалов при механическом воздействии);
- лазерные датчики для точного измерения малых перемещений;
- ультразвуковые датчики для измерения расстояний в медицинских приборах, системах автофокусировки фото- и телекамер, измерения уровня и скорости.