Добавлен: 23.10.2018
Просмотров: 6964
Скачиваний: 21
139
Номинальной нагрузке соответствует номинальное скольжение
НОМ
s
и номи-
нальная частота вращения
НОМ
n
, которые указываются в паспортных данных
двигателя.
Характеристики асинхронных двигателей
Основной характеристикой асинхронного двигателя является механиче-
ская характеристика, т. е. зависимость момента двигателя от частоты вращения.
Для асинхронного двигателя эта зависимость имеет довольно сложный вид, по-
этому чаще используется зависимость момента двигателя от скольжения:
]
x
)
s
R
R
[(
s
R
U
3
М
2
k
2
2
1
0
2
2
1
,
где: U
1
– напряжение питающей сети,
1
R
- сопротивление обмотки статора,
2
R
-
приведенное суммарное сопротивление обмотки ротора,
0
- частота идеального
холостого хода,
2
1
к
х
х
х
- индуктивное сопротивление короткого замыкания,
1
х - индуктивное сопротивление статора,
2
х
- приведенное индуктивное сопро-
тивление ротора.
Из этого выражения следует, что электромагнитный момент, асинхронно-
го двигателя пропорционален квадрату действующего значения напряжения на
фазной обмотке статора. Таким образом небольшое снижение напряжения сети
может вызвать значительное снижение электромагнитного момента.
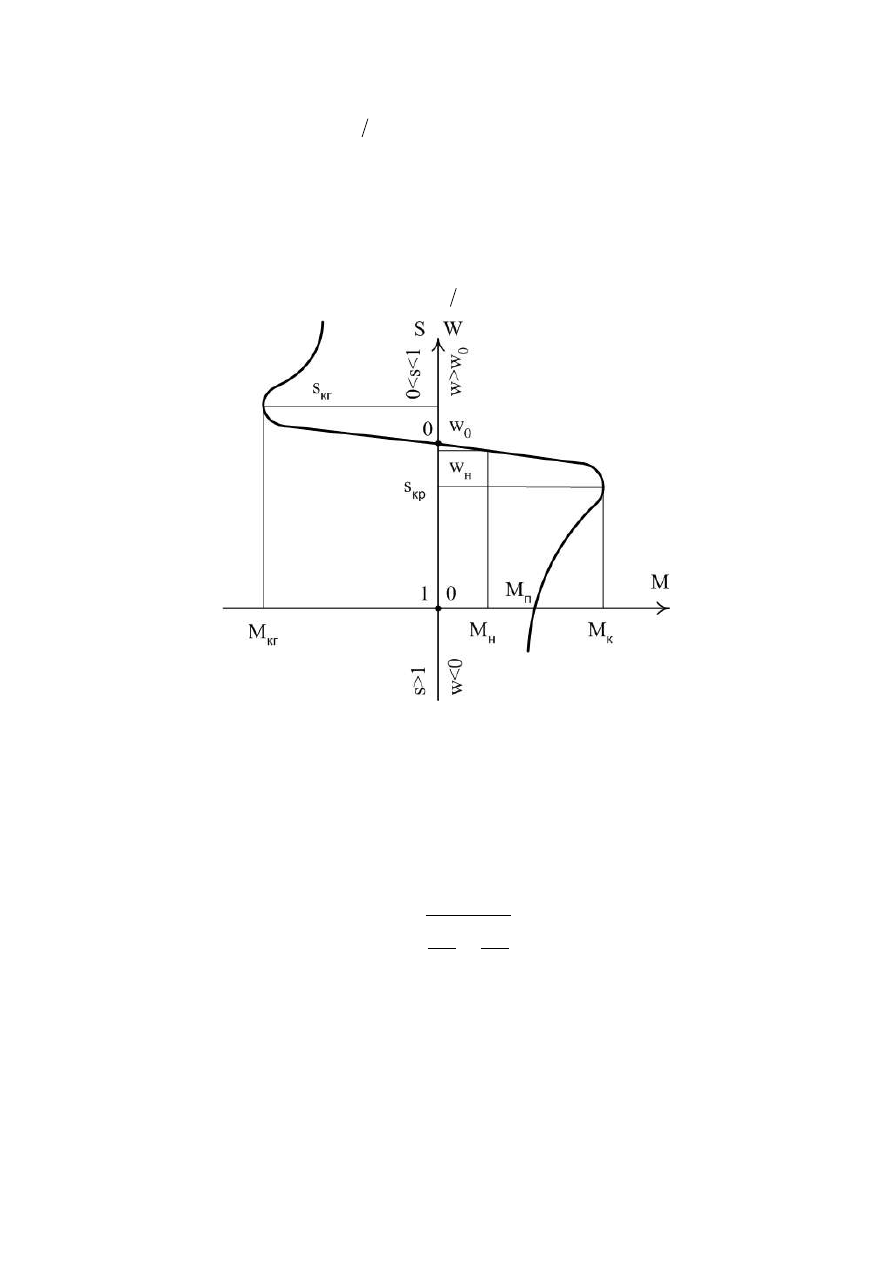
На рисунке 7.7 показана кривая зависимости электромагнитного момента
от скольжения. С учетом того, что скольжение и частота вращения связаны ме-
жду собой соотношением
0
0
/
)
(
s
, на рисунке 7.7 ось скольжений так же
проградуирована соответствующими значениями частоты вращения асинхрон-
ного двигателя (
1
s
,
0
;
0
s
,
0
;
0
s
,
0
).
Кривая зависимости электромагнитного момента от скольжения имеет
максимумы. Эти точки характеризуются значениями критического момента и
скольжения для двигательного и генераторного режимов работы:
2
K
2
1
2
K
x
R
R
s
,
)
x
R
R
(
2
U
3
M
2
K
2
1
1
0
2
1
K
,
знак "+" в этих выражениях соответствует двигательному режиму работы, "-" –
генераторному. При приложении к асинхронному двигателю момента нагруз-
ки, превышающего критический, двигатель остановится. В паспортных данных
140
асинхронного двигателя помимо номинального момента указывается кратность
перегрузки по моменту
Н
К
М
М
(
Н
М
- номинальный момент). У асинхронных
короткозамкнутых двигателей нормального исполнения
5
.
2
8
.
1
, для дви-
гателей краново-металлургической серии
5
.
3
2
. Для электрических сетей
промышленных предприятий допустимое отклонение напряжения сети состав-
ляет 5%. Чтобы учесть это отклонение и с учетом того, что момент асинхронно-
го двигателя пропорционален квадрату напряжения, кратность перегрузки по
моменту обычно принимают
Н
К
М
М
85
.
0
.
Рисунок 7.7 - Зависимость электромагнитного момента
от скольжения
С учетом выражений для критического момента и скольжения уравнение
механической характеристики можно записать в виде упрощенной формулы
Клосса, которая часто применяется для практических расчетов:
s
s
s
s
M
2
M
K
K
K
.
Пуск асинхронных двигателей
Пуск асинхронного двигателя осложняется тем обстоятельством, что от-
сутствует возможность раздельного регулирования магнитного поля машины и
электромагнитного момента. Так что в отличие от двигателя постоянного тока,
где пуск происходит при номинальном значении магнитного потока, в асин-
141
хронном двигателе при подаче напряжения на статор, имеющий большую ин-
дуктивность, магнитный поток возрастает медленно и пуск происходит при ос-
лабленном магнитном потоке. Это обуславливает большие броски тока при
прямом пуске асинхронного двигателя. Поэтому прямой пуск применяют, толь-
ко для двигателей малой мощности (Р
Н
< 10 кВт). Для ограничения пускового
тока применяют несколько способов, зависящих от варианта исполнения двига-
теля (короткозамкнутый или с фазным ротором).
Пуск асинхронных двигателей с фазным ротором
Основным способом пуска двигателей с фазным ротором является рео-
статный пуск. Суть этого способа заключается в том, что в цепь ротора асин-
хронного двигателя включают дополнительные сопротивления (
Д
R
). Из выра-
жения критического момента асинхронного двигателя следует, что М
К
не зави-
сит от суммарного сопротивления цепи ротора
2
R
(куда входит и сопротивле-
ние
Д
R
). Тогда как критическое скольжение пропорционально
2
R
. То есть при
увеличении суммарного сопротивления фазы обмотки ротора уменьшается же-
сткость механической характеристики, а значение критического момента оста-
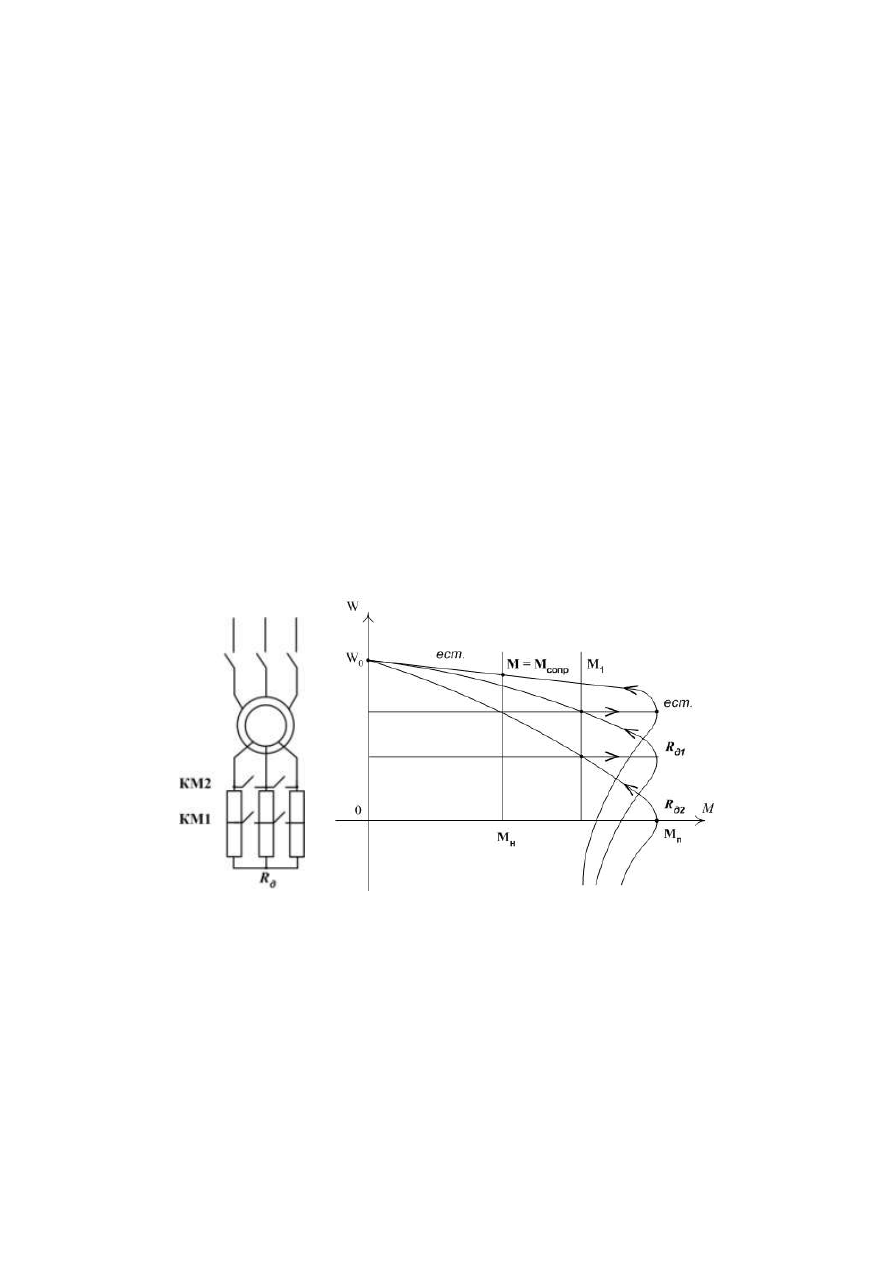
ется неизменным. На рисунке 7.8 показана схема включения двигателя (а) и ме-
ханические характеристики (б) при реостатном пуске в три ступени.
а) б)
Рисунок 7.8 - Схема (а) и механические характеристики (б) асинхронного
двигателя с фазным ротором при реостатном пуске
Пуск происходит при максимальном значении
2
Д
Д
R
R
(все контакты ра-
зомкнуты). По мере разгона двигателя, для увеличения темпа разгона, часть со-
противления выводят из работы (замыкают КМ1) двигатель переходит на ха-
рактеристику соответствующую
1
Д
Д
R
R
. Далее сопротивление
Д
R
полностью
142
выводят из работы замыкая цепь ротора накоротко (замкнут КМ2). Двигатель
переходит на естественную механическую характеристику и разгоняется по ней
до точки установившегося режима, когда М
ЭМ
= М
СОПР
. Достоинством этого
способа пуска является высокий пусковой момент, который может достигать
значений М
П
= М
К
.
Пуск короткозамкнутых асинхронных двигателей
Для короткозамкнутого асинхронного двигателя существенного снижения
пусковых токов можно добиться за счет ограничения темпа нарастания ампли-
туды питающего напряжения. Этого достигают несколькими способами:
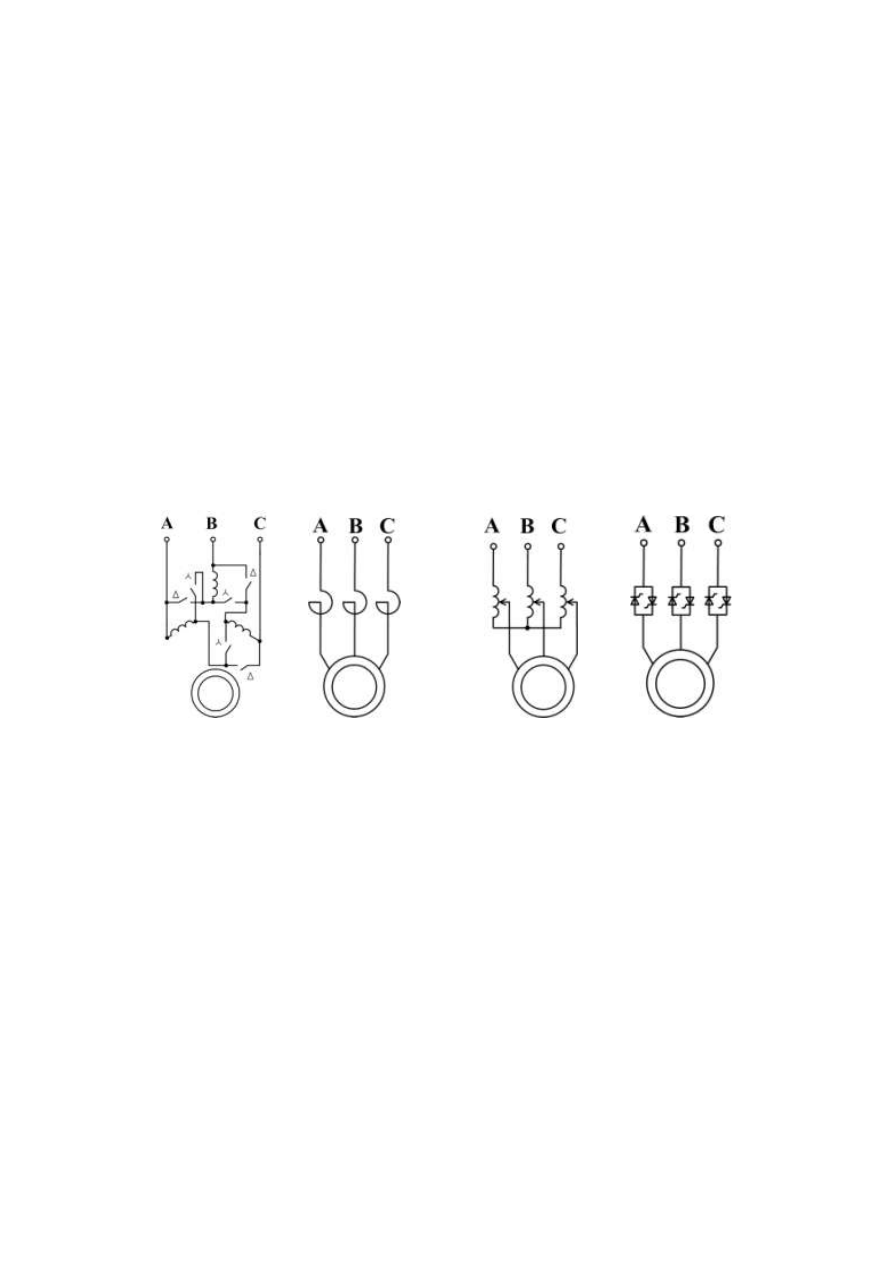
1. Включение реакторов насыщения в цепь статора (рисунок 7.9, а).
2. Пуск двигателя с помощью автотрансформатора (рисунок 7.9, б).
3. Переключение обмоток статора с треугольника в звезду (рисунок 7.9, в).
4. Питание обмоток статора от тиристорного регулятора напряжения (ри-
сунок 7.9,г).
а) б) в) г)
Рисунок 7.9 - Пуск короткозамкнутых асинхронных двигателей
Любой из этих способов приводит к резкому уменьшению пускового мо-
мента асинхронного двигателя, что допустимо далеко не для всех механизмов.
Некоторые механизмы требуют значения пускового момента равного или пре-
вышающего номинальный. В таких случаях применяют частотный пуск асин-
хронного двигателя. Питание обмоток статора в этом случае производится от
преобразователя частоты, позволяющего плавно регулировать частоту и ампли-
туду питающего напряжения. Подробнее этот способ будет рассмотрен при
изучении частотного регулирования скорости асинхронного двигателя.
Кроме того применяют асинхронные короткозамкнутые двигатели специ-
ального исполнения с увеличенным сопротивлением ротора (с повышенным
143
скольжением) и с обмоткой ротора выполненной в виде двойной беличьей
клетки. У таких двигателей при пуске (частота тока в роторе равна частоте тока
статора) сопротивление ротора сопротивление намного больше, чем в номи-
нальном режиме, что вызывает снижение пускового тока при достаточно боль-
шом значении пускового момента (аналогично реостатному пуску двигателя с
фазным ротором). Такие двигатели пускают методом прямого подключения в
сети. Недостатком этих двигателей является низкий КПД в номинальном режи-
ме, связанный с повышенными потерями в сопротивлении ротора.
Регулирование скорости асинхронного двигателя
Частота вращения асинхронного двигателя зависит от частоты вращения
основного магнитного поля статора (n
0
), от сопротивления фаз обмотки ротора
(
2
R
) и от напряжения питающей сети. Частота вращения основного магнитно-
го поля определяется выражением:
p
f
60
n
C
0
.
Из этого выражения следует, что частоту вращения основного поля можно ре-
гулировать изменяя число пар полюсов машины р и частоту питающей сети
C
f
.
На этом основаны два способа регулирования частоты вращения асинхронного
двигателя:
Регулирование частоты вращения за счет изменения числа пар полю-
сов
Этот способ регулирования требует применения асинхронных двигателей
специального исполнения. В таких двигателях каждую фазу обмотки статора
выполняют в виде двух секций которые можно включать последовательно друг
другу, либо параллельно. При последовательном соединении секций число пар
полюсов двигателя вдвое больше чем при параллельном. Следовательно при
переключении секций из параллельного соединения в последовательное частота
вращения основного поля уменьшится вдвое. Механические характеристики
асинхронного двигателя при таком способе регулирования скорости показаны
на рисунке 7.10. Недостатком этого способа является применение двигателей
специального исполнения, имеющих гораздо более сложную конструкцию, чем
обычные. По этой же причине двигатели, имеющие больше двух скоростей
вращения практически не применяются.