ВУЗ: Пермский национальный исследовательский политехнический университет
Категория: Лекция
Дисциплина: Системы реального времени
Добавлен: 15.11.2018
Просмотров: 871
Скачиваний: 10

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
1
Системы реального времени
Лекция 1
Основные понятия и определения
Системы реального времени как автоматизированные системы
управления
Рассмотрим две наиболее часто встречающиеся схемы отношений между
человеком, компьютером и окружающим их внешним миром (см. рисунок 1) [1].
а) человек – посредник между ЭВМ и
внешним миром
б) ЭВМ – посредник между человеком и
внешним миром
Рисунок 1 – Варианты применения ЭВМ
Случай (а) встречается чаще, он характерен для систем обработки информации.
Согласно этой схеме, человек непосредственно взаимодействует с объектами внешнего
мира (воспринимает от них информацию и оказывает на них воздействие), а ЭВМ играет
вспомогательную роль – выполняет вычисления и преобразования информации, которые
нужны человеку. Большинство систем, построенных по схеме (а) представляют собой
АИС (автоматизированные информационные системы), АРМ (автоматизированные
рабочие места), САПР (системы автоматизированного проектирования) и т.п.
Схема (б) соответствует тому случаю, когда человек (в силу собственного
несовершенства) не способен самостоятельно взаимодействовать с объектами внешнего
мира. ЭВМ и системы на их основе играют роль посредника между человеком и
объектами внешнего мира. Большинство систем, построенных по схеме (б), представляют
собой АСУ (автоматизированные системы управления) [1].
Нужно различать понятия «автоматический» и «автоматизированный».
Автоматические системы (или просто автоматы) – это устройства, выполняющее
жестко заданный набор действий без участия человека. Автоматизированные системы
обычно работают при прямом или косвенном участии человека-оператора в качестве звена
общей цепи управления объектом.
Также нужно различать понятия «управление» и «регулирование». Под управлением
обычно понимают сложную функцию автоматизированной системы, направленную на
сохранение определенной структуры управляемого объекта внешнего мира, поддержание
определенного режима его работы, реализацию определенной программы поведения
объекта, обеспечение достижения им определенных целей. Регулирование – частный
случай управления, представляющий собой принудительную стабилизацию небольшого
количества (иногда – всего одного) физических параметров, от которых зависит
поведение объекта [1].

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
2
Системами реального времени (СРВ) называются автоматизированные системы с
жесткими ограничениями на временные (динамические) характеристики работы.
Формально это условие может быть записано в виде:
(1)
где – некоторая временная характеристика (например, время реакции на внешнее
событие, длительность выполнения какой-либо операции, момент наступления какого-
либо события и т.п.);
– предельно допустимое значение времени реакции на событие.
Выход за эти границы считается отказом в работе СРВ [1].
Другими словами, системой реального времени называется система, в которой
успешность работы любой программы (задачи) зависит не только от ее логической
правильности, но и от времени, за которое она получила результат. Если временные
ограничения не удовлетворены, то фиксируется сбой в работе системы [2].
Система называется системой реального времени, если правильность ее
функционирования зависит не только от логической корректности вычислений, но и от
времени, за которое эти вычисления производятся [1].
Таким образом, временные ограничения должны быть гарантированно
удовлетворены, что требует от системы быть предсказуемой, т.е. вне зависимости от
своего текущего состояния и загруженности выдавать нужный результат за требуемое
время. При этом желательно, чтобы система обеспечивала как можно больший процент
использования имеющихся ресурсов.
Также говорят, что система работает в реальном времени, если ее быстродействие
адекватно скорости протекания физических процессов на объектах контроля или
управления. Так как окружающий нас мир весьма многообразен, здесь уместно добавить,
что имеются в виду именно те процессы, которые непосредственно связаны с функциями,
выполняемыми конкретной системой реального времени. То есть система управления
должна собрать данные, произвести их обработку в соответствии с заданными
алгоритмами и выдать управляющие воздействия за такой промежуток времени, который
обеспечивает успешное решение поставленных перед системой задач [2]. Так что должно
быть интуитивно понятно, что быстродействие системы реального времени должно быть
тем больше, чем больше скорость протекания процессов на объекте контроля и
управления.
Иногда понятие «система реального времени» отождествляют с понятием «быстрая
система». Но это не всегда правильно. Время задержки СРВ на событие не так уж важно
(оно может достигать нескольких секунд ли даже минут). Главное, чтобы это время было
достаточно для рассматриваемого объекта управления и гарантировано [1]. Т.е.
принадлежность системы к классу систем реального времени, по большей части, никак не
связана с её быстродействием. Например, если система предназначена для контроля
уровня грунтовых вод, то, даже выполняя измерения с периодичностью один раз за
полчаса, она будет работать в реальном времени [2].
Исходные требования к времени реакции системы и другим временным
параметрам определяются или техническим заданием на систему, или просто логикой её
функционирования. Например, шахматная программа, «думающая» над каждым ходом

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
3
более года, работает явно не в реальном времени, так как шахматист, скорее всего, не
доживет до конца партии. Однако точное определение «приемлемого времени реакции»
не всегда является простой задачей, а в системах, где одним из звеньев служит человек,
ещё и подвержено влиянию субъективных факторов.
Во многих сферах применения СРВ вводят свои понятия «реального времени».
Например, процесс цифровой обработки сигнала (в частности применяется в системах
мобильной связи стандарта GSM) называют идущим в «реальном времени», если анализ
(при вводе) и/или генерация (при выводе) данных может быть проведен за то же время,
что и анализ и/или генерация тех же данных без цифровой обработки сигнала. Например,
если при обработке аудио данных требуется 2.01 секунды для анализа 2.00 секунд звука,
то это не процесс реального времени. Если же требуется 1.99 или 2.00 секунды, то это
процесс реального времени.
Обобщая всё вышеизложенное, назовем системой реального времени аппаратно-
программный комплекс, реагирующий за предсказуемый интервал времени на
непредсказуемый поток внешних событий.
Это определение означает, что:
Система должна успеть отреагировать на событие, произошедшее на объекте, в
течение времени, критического для этого события. Величина критического
времени для каждого события определяется объектом и самим событием, и,
естественно, может быть разной, но время реакции системы должно быть
предсказано (вычислено) при создании системы. Отсутствие реакции в
предсказанное время считается ошибкой для систем реального времени.
Система должна успевать реагировать на одновременно происходящие события.
Даже если два или больше внешних событий происходят одновременно, система
должна успеть среагировать на каждое из них в течение интервалов времени,
критических для этих событий.
Примером задачи, где требуется применение СРВ, является управление роботом,
берущим деталь с ленты конвейера. Деталь движется, и робот имеет лишь маленькое
временное окно, когда он может её взять. Если он опоздает, то деталь уже не будет на
нужном участке конвейера, и, следовательно, работа не будет сделана, несмотря на то, что
робот находится в правильном месте. Если он позиционируется раньше, то деталь еще не
успеет подъехать, и робот заблокирует ей путь.
Другим примером может быть самолет, находящийся на автопилоте. Датчики и
сервоприводы должны постоянно передавать в управляющий компьютер результаты
измерений. Если результат какого-либо измерения будет пропущен, то это может
привести к недопустимому несоответствию между реальным состоянием систем самолета
и информацией о нем в управляющей программе. То же касается и бортовых систем
ракеты-носителя или спутника, выведенного на орбиту Земли.
Основное предназначение СРВ – взаимодействие с объектами реального мира в
темпе процессов, протекающих в этих объектах. Большинство АСУ является СРВ, а среди
АИС такие системы встречаются редко [1].
Практически все системы промышленной
автоматизации являются системами реального времени [2].

Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
4
Различают системы реального времени двух типов – системы жесткого реального
времени (СЖРВ) и системы мягкого реального времени (СМРВ) [1].
Системой «жесткого» реального времени называется система, где неспособность
обеспечить реакцию на какие-либо события в заданное время является отказом и ведет к
невозможности решения поставленной задачи, т.к:
результаты могут оказаться бесполезны в случае опоздания,
может произойти катастрофа в случае задержки реакции,
стоимость опоздания может оказаться неприемлемо высокой.
Последствия таких отказов могут быть разные, от пролива жидкости на линии по
розливу алкогольных напитков до более крупных неприятностей, если, например, вовремя
не сработала система аварийных блокировок реактора на АЭС.
Примеры систем жесткого реального времени – бортовые системы управления,
системы аварийной защиты, регистраторы аварийных событий.
Считается, что время реакции в системах «жесткого» реального времени должно
быть минимальным. Разумеется, однозначного мнения о том, какое время реакции
свойственно «жестким» системам, нет. Более того, с увеличением быстродействия
микропроцессоров это время имеет тенденцию к уменьшению, и если раньше в качестве
границы называлось значение 1 мс, то сейчас, как правило, называется время порядка 100
мкс.
Системы мягкого реального времени характеризуются тем, что задержка реакции
не критична, хотя и может привести к увеличению стоимости результатов и снижению
производительности системы в целом.
Считается, что к категории систем мягкого реального времени относятся все
системы реального времени, не попадающие в категорию «жестких».
Пример – работа маршрутизатора в сети. Если маршрутизатор не успела
обработать очередной принятый пакет, это приведет к таймауту на передающей стороне и
повторной посылке (в зависимости от протокола, конечно). Данные при этом не теряются,
но производительность маршрутизатора (и сети передачи данных в целом) снижается.
Так как система «мягкого» реального времени может не успевать выполнять
некоторые задачи в заданное время, возникает проблема определения критериев
успешности (нормальности) ее функционирования. Вопрос этот совсем не простой, так
как в зависимости от функций системы это может быть максимальная задержка в
выполнении каких-либо операций, средняя своевременность отработки событий и т. п.
Более того, эти критерии влияют на то, какой алгоритм планирования задач будет
являться оптимальным [2].
Основное отличие между системами жесткого и мягкого реального времени можно
выразить так [1]: система жесткого реального времени никогда не опоздает с реакцией
на событие, система мягкого реального времени – не должна опаздывать с реакцией на
событие.
Т.е. в СЖРВ нарушение условия (1) недопустимо, а в СМРВ это изредка может
происходить.
Ст. преп. каф. ИТАС Фёдоров Андрей Борисович
версия документа 2018-01-11
5
Классификация АСУ реального времени
Рассмотрим следующие классы АСУ, являющихся СРВ [1]:
АСУ ТП – АСУ технологическими процессами (например, система управления
ядерным реактором АЭС или система управления конвейером автозавода);
АСНИ – автоматизированные системы научных исследований и комплексных
испытаний (например, система вибрационных испытаний компонентов ракетной
техники);
встроенные системы управления (предназначенные для управления работой
простых технических объектов – мобильных телефонов, стиральных машин,
станков и т.п.) и бортовые системы управления (предназначенные для
управления автомобилями, танками, самолетами, ракетами и т.п.)
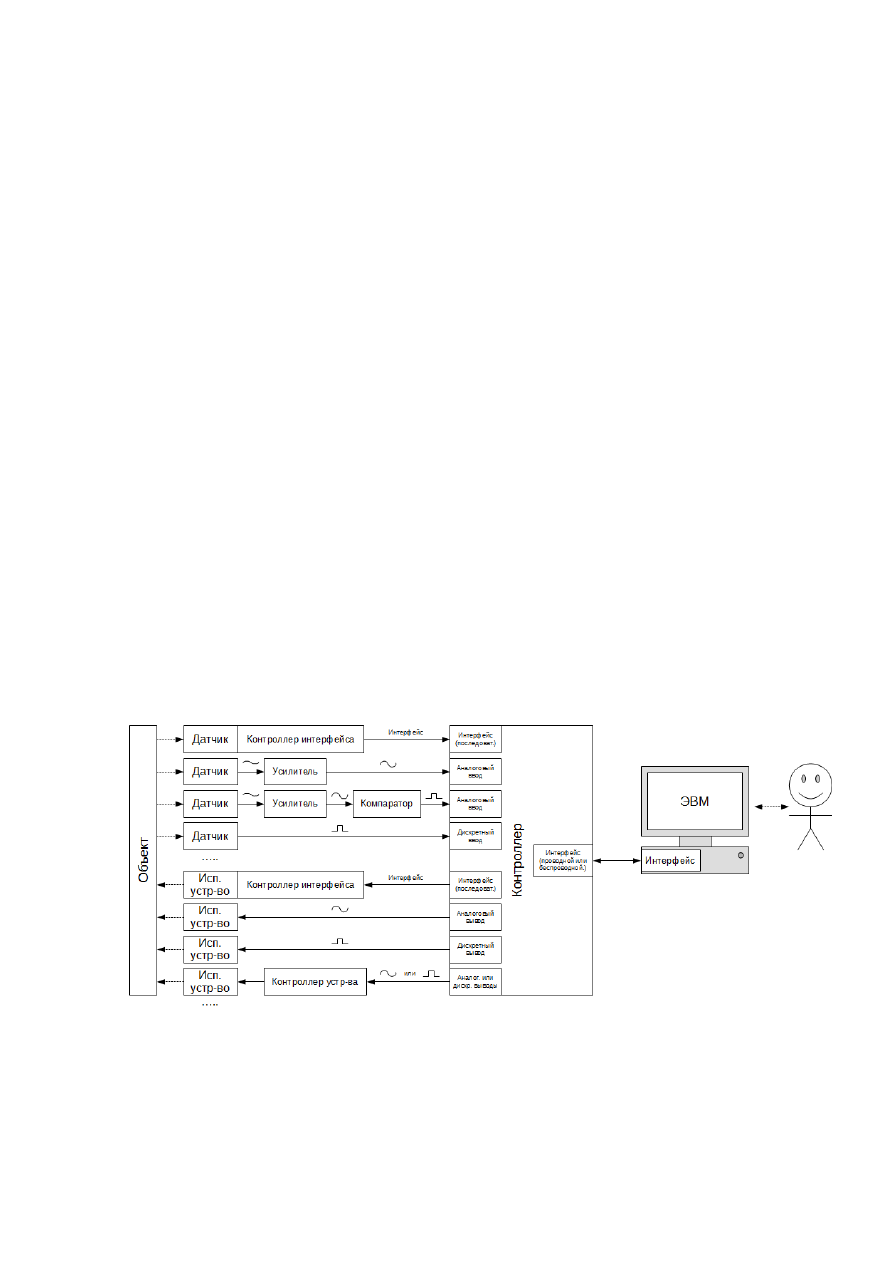
Обобщенная структура АСУ реального времени
АСУ представляют собой сложные программно-аппаратные комплексы,
функционирующие на основе специализированных математических методов. Основными
задачами, решаемыми типичной АСУ, являются [1]:
сбор данных о состоянии и поведении управляемого объекта;
преобразование, отображение, сохранение, передача и отображение этих
данных;
анализ данных и принятие решений;
выдача управляющих воздействий на объект.
Обобщенная структура автоматизированной системы управления изображена на
рисунке 2.
Рисунок 2 – Обобщённая структурная схема АСУ
На практике встречаются также частные случаи этой структуры [1]:
если в системе присутствуют только каналы сбора данных и измерения, то это
ИИС (информационно-измерительная система);