Добавлен: 28.11.2018
Просмотров: 1201
Скачиваний: 18
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«РОССИЙСКИЙ УНИВЕРСИТЕТ ТРАНСПОРТА (МИИТ)»
(РУТ (МИИТ)
Одобрено кафедрой
«
ЖЕЛЕЗНОДОРОЖНАЯ АВТОМАТИКА ТЕЛЕМЕХАНИКА И СВЯЗЬ»
Протокол №
от
201
г.
Автор:
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ С МЕТОДИЧЕСКИМИ
УКАЗАНИЯМИ
ПО ДИСЦИПЛИНЕ
Технические средства автоматизации и управления
Уровень ВО:
Бакалавриат
Форма обучения:
Заочная
Курс: 4
Специальность/Направление: 27.03.04 Управление в технических
системах (УТб)
Специализация/Профиль/Магистерская программа: (УТ) Системы и
технические средства автоматизации и управления
Москва

ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
Название проекта: «Синтез и исследование системы автоматического
регулирования параметров технологического процесса с передачей
информации по телемеханическому каналу связи»
В процессе выполнения задания студенту необходимо:
1. Разработать устройства организации телемеханического канала связи
между пунктом управления и объектом управления, осуществить их
настройку и исследовать их характеристики. Для этого:
–
синтезировать структурные схемы кодирующего и декодирующего
устройства для передачи сообщений по телемеханическому каналу в
заданном помехозащищенном коде;
–
разработать модели канала связи с возможностью имитации ошибок при
передаче данных, а также анализатора, для оценки достоверности передачи
данных при наличии ошибок;
–
рассчитать корректирующие способности заданного помехозащитного кода
и оценить достоверность передачи данных при известной вероятности
одиночных искажений символов.
2. Для объекта управления с заданными характеристиками разработать
структурную схему системы автоматического регулирования замкнутого
типа, осуществить её настройку и анализ качества регулирования. Для этого:
–
по кривой разгона определить характеристики объекта управления;
–
выбрать тип регулятора и настроить его параметры для обеспечения
заданных показателей качества переходного процесса, снять и
проанализировать характеристики процесса регулирования.
3.
Синтезировать модель передачи уставок параметров технологического
процесса по заданной программе и получить график процесса регулирования
при отсутствии искажений в канале связи;
4.
Сформировать перечень технических характеристик разработанной
системы.
5.
Сформулировать выводы по работе.
Исходные данные для выполнения курсового проекта:
–
количество передаваемых уставок по телемеханическому каналу связи – 16
–
в случае обнаружения ошибок в принимаемом сообщении должна
использоваться уставка с десятичным номером «0»;
–
используемый для передачи сообщений помехозащитный код, а также
режим работы декодирующего устройства определяются из таблицы 1 по
предпоследней и последней цифре шифра студента (самой правой)
соответственно
Таблица 1
Предпоследняя
цифра шифра
Помехозащитный
код
Последняя
цифра шифра
Режим работы
0
Инверсный код
0
Обнаружение
ошибок
1
Инверсный код
1
Обнаружение
и
исправление ошибок
2
Модифицированный
код Бауэра
2
Обнаружение
ошибок
3
Модифицированный
код Бауэра
3
Обнаружение
и
исправление ошибок
4
Код Хемминга
4
Обнаружение
ошибок
5
Код Хемминга
5
Обнаружение
и
исправление ошибок
6
Модифицированный
код Хемминга
6
Обнаружение
ошибок
7
Модифицированный
код Хемминга
7
Обнаружение
и
исправление ошибок
8
Модифицированный
код Бауэра
8
Обнаружение
ошибок
9
Модифицированный
код Хемминга
9
Обнаружение
и
исправление ошибок
–
вероятности искажения одиночных символов в канале связи определяются
младшим символом суммы предпоследней и последней цифр шифра студента
из таблицы 2
Таблица 2
Младший
символ
суммы
предпоследней и последней цифр
шифра
Вероятность искажения символа
0
0.01
1
0.05
2
0.03
3
0.07
4
0.04
5
0.02
6
0.09
7
0.06
8
0.08
9
0.1
–
характеристики каждого из используемых помехозащитных кодов для
проведения расчетов приведены в таблице 3
Таблица 3
Помехозащитный код
Количество
различных
сообщений
Общее
количество
символов в
сообщении
Минимальное
кодовое расстояние
Инверсный код
16
8
4
Модифицированный
код Бауэра
16
8
4
Код Хемминга
16
7
3
Модифицированный
код Хемминга
16
8
4
–
время моделирования для всех вариантов равно 12.8 сек, максимальный
шаг моделирования равен 0.01 сек.
–
программа изменения уставок заданного параметра технологического
процесса с шагом 0.1 сек представлена в таблице 4 вектором данных и
определяется младшим символом произведения предпоследней и последней
цифр шифра студента (вектор программы должен начинать выполняться
левым символом, а заканчиваться – правым символом программы).
Таблица 4
Младший символ произведения
предпоследней и последней цифр
шифра
Программа изменения уставок
0
[1111222255588]
1
[3331122223333]
2
[4444442222211]
3
[2211122222111]
4
[5555533333222]
5
[6666677333333]
6
[9999977773333]
7
[7777776666655]
8
[8888884499999]
9
[2222222333322]
–
тип регулятора определяется в зависимости от четности последней цифры
шифра студента: ПИ – нечетная, ПИД – четная.
–
типовой переходной процесс в зависимости от четности препоследней
цифры: с 20% перерегулированием – нечетная, с минимумом средней
квадратичной ошибки – четная.
–
кривая разгона объекта регулирования определяется младшим символом
произведения предпоследней и последней цифр шифра студента из таблицы
5.
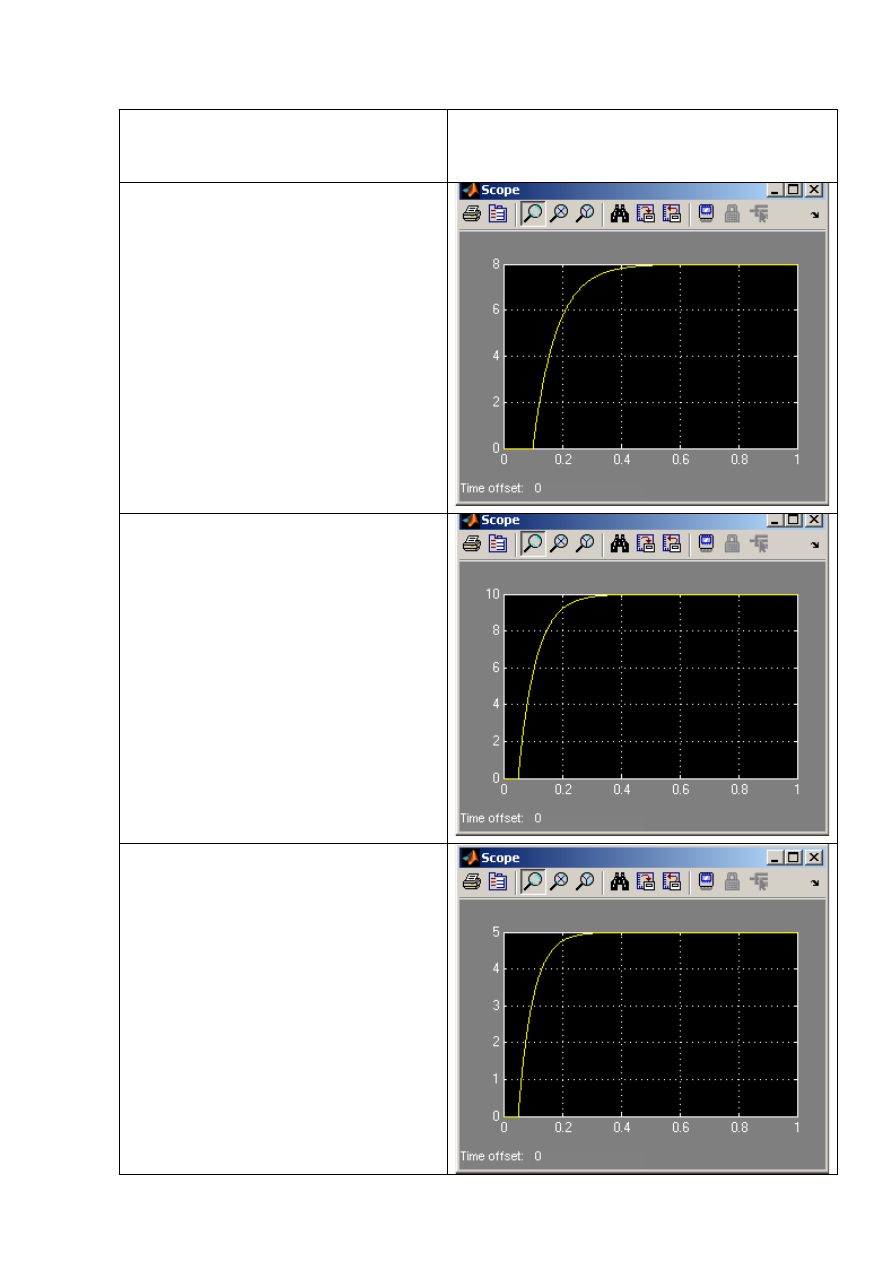
Таблица 5
Младший символ произведения
предпоследней и последней цифр
шифра
Кривая разгона
0
1
2