Файл: Методические рекомендации (материалы) для студентов дисциплины (модуля).docx
Добавлен: 24.10.2023
Просмотров: 223
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Рисунок 3 – Квазисвязанный режим работы сети ОКС№7
3) Несвязанном - сообщения между SP могут направляться, в зависимости от состояния элементов сети, по разным маршрутам, т.е. маршруты заранее не определены.
Рисунок 4 – Несвязанный режим работы сети ОКС№7
Сигнальная информация передается между пунктами сигнализации в виде сообщений переменной длины, называемых сигнальными единицами.
Существует три типа сигнальных единиц (SignalUnit - SU):
• значащая сигнальная единица (MessageSignalUnit - MSU), которая используется для передачи сигнальной информации, формируемой подсистемами пользователей или SCCP;
• сигнальная единица состояния звена (LinkStatusSignalUnit - LSSU)., которая используется для контроля состояния звена сигнализации;
• заполняющая сигнальная единица (Fill-InSignalUnit - FISU), которая используется для фазирования звена при отсутствии сигнального трафика.
Сигнальные единицы всех трех типов имеют в своем составе одинаковые поля, формируемые подсистемой передачи сообщений (МТР).
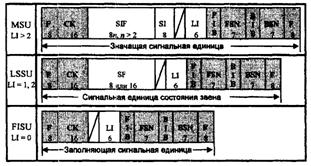
Рисунок 5 -Формат сигнальных единиц (цифрами обозначено количество бит в каждом поле)
Рассмотрим подробнее назначение каждого поля в структуре сигнальных единиц.
F(Flag) - флаг выполняет роль ограничителя сигнальных единиц, причем начало и конец каждой из них отмечается уникальной 8-битовой последовательностью. Обычно закрывающий флаг одной сигнальной единицы является открывающим флагом следующей сигнальной единицы. Последовательность битов флага: 01111110.

Рисунок 6 -Разграничение сигнальных единиц
Чтобы избежать имитации флага другой частью сигнальной единицы, передающий пункт сигнализации вставляет ноль после каждой последовательности из пяти следующих друг за другом единиц, содержащихся в любой части сигнальной единицы кроме флага. Этот ноль изымается на приемном конце оконечного устройства звена сигнализации уже после обнаружения и отделения флагов. Если после приема 272 байтов (максимальная возможная длина сигнальной единицы) флаг не определен, это означает, что или звено сигнализации находится в неисправном состоянии, или передающая и принимающая стороны не синхронизированы/не сфазированы.

Рисунок 7 -После приема 272 байтов флаг не определен
BSN (BackwardSequenceNumber) - обратный порядковый номер; BIB (BackwardBit-Indicator) - обратный бит-индикатор; FSN (ForwardSequenceNumber) - прямой порядковый номер; FIB (ForwardBit-Indicator) - прямой бит-индикатор. Данные поля сигнальной единицы используются в методах исправления ошибок, рассматриваемых далее.
LI (LengthIndicator) - индикатор длины указывает количество байтов, следующих за, индикатором длины и предшествующих проверочным битам (СК), и принимает значения (в двоичной форме) 0...63.
Кроме того, индикатор длины служит для идентификации типа сигнальной единицы:
LI = 0 - заполняющая сигнальная единица (FISU);
LI = 1 или 2 - сигнальная единица состояния звена (LSSU);
LI > 2 - значащая сигнальная единица (MSU).
SF (StatusField) - поле состояния содержится только в сигнальных единицах состояния звена (LSSU). Данное поле применяется для передачи информации о состоянии звена сигнализации (например, во время процедуры фазирования).
Поле состояния может быть длиной в один байт (индикатору длины присваивается значение 1) или же в два байта (индикатору длины присваивается значение 2).

Рисунок 8 - Формат однобайтового поля состояния в LSSU
Для индикации состояния звена сигнализации используется следующее кодирование битов СВА:
000 - индикация состояния «О» («отключено»);
001 - индикация состояния «N» («нормальное фазирование»);
010 - индикация состояния «Е» («аварийное фазирование»);
011 - индикация состояния «OS» («не работает»);
100 - индикация состояния «РО» («процессор отключен»);
101 - индикация состояния «В» («занято»),
SIO (ServiceInformationOctet) - байт служебной информации передается только в значащих сигнальных единицах (MSU). Содержит индикатор службы (ServiceIndicator - SI) и поле подвида службы (SubServiceField - SSF). В свою очередь, поле подвида службы содержит индикатор сети (NetworkIndicator - N1) и два резервных бита.
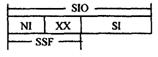
Рисунок 9 -Формат байта служебной информации
Индикатор сети (N1) определяет тип сети, в которую направляется сигнальное сообщение. В российской спецификации он кодируется следующим образом:
00XX - международная сеть;
01XX - резерв для международной сети;
10ХХ - междугородная сеть;
11ХХ - местная сеть.
Индикатор службы (SI) показывает, какая подсистема пользователя (уровень 4) сформировала данное сигнальное сообщение (в исходящем пункте сигнализации) и в какую подсистему пользователя данное сигнальное сообщение необходимо доставить (в пункте назначения). Индикатор службы (SI) кодируется следующим образом:
0000 - управление сетью сигнализации;
0001 - тест звена сигнализации;
0011 - подсистема управления соединениями сигнализации (SCCP);
0100 - подсистема пользователя телефонии (TUP);
0101 - подсистема пользователя ЦСИС (ISUP).
SIF (SignalingInformationField) - поле сигнальной информации передается только в составе значащих сигнальных единиц (MSU) и содержит информацию, которая должна передаваться между подсистемами пользователей двух пунктов сигнализации (рис. 3.3.7). Поле сигнальной информации (SIF) может состоять максимум из 272 байтов, форматы и коды которых определяются подсистемой пользователя. Подсистема передачи сообщений МТР не анализирует содержимое SIF, кроме этикетки маршрутизации, которая используется для маршрутизации сообщений в сети сигнализации. Не считая этой информации о маршруте, МТР просто передает содержащуюся в SIF информацию от уровня 4 одного пункта сигнализации к уровню 4 другого пункта сигнализации.
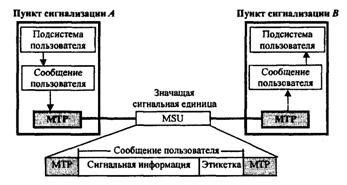
Рисунок 10 -Передача информации пользователя
Лабораторная работа №11
Тема: «Цифровая автоматическая телефонная станция AXE-10»
Цель работы: Изучить цифровую автоматическую телефонную станцию AXE-10.
Литература:
-
А.Л. Суховицкий IP-телефония.-М.:Радио и связь, 2001.-336с.:ил -
Л.С.Левин, М.А. Плоткин Цифровые системы передачи информации.-М.:РиС,1982 -
Скалин Ю.В. и др. Цифровые системы передачи:учебник доя техникумов.-М.: Радио и связь, 1988.
Порядок выполнения работы:
-
Изучить технические характеристики АХЕ-10. -
Изучить структуру АХЕ-10. -
Ознакомиться с составом подсистем АХЕ-10. -
Изучить работу центрального процессора.
Содержание отчета:
-
Цель работы. -
Краткое содержание теории. -
Структурная схема АХЕ-10. -
Состав подсистем АХЕ-10. -
Структура подсистемы центрального процессора. -
Выводы.
Теоретическая часть
Коммутационная система АХЕ-10 разработана фирмой Ericsson (Швеция). ЦСК АХЕ-10 может использоваться как международная
, междугородная, городская (оконечная и транзитная), а также как центральная станция сотовой сети. Предусмотрена стыковка со всеми существующими системами и типами АТС, используются все стандарты систем сигнализации по соединительным и абонентским линиям.
Основные технические характеристики системы:
- система управления иерархическая;
- количество абонентских линий – до 200000;
- количество соединительных линий – до 60000;
- пропускная способность 30000 Эрл;
- количество вызов в ЧНН – до 200000;
- емкость выносных концентраторов – до 2048 АЛ и до 480 СЛ;
- электропитание от –48В до –51В постоянного тока.
АХЕ-10 состоит из двух основных частей (рисунок 1): управляющей системы (APZ) и коммутационного оборудования(APT).
Рисунок 1 – Структура АХЕ-10
Системы APZ и APT структурно состоят из подсистем. Каждая подсистема делится на несколько частей, называемых функциональными блоками, которые, в свою, очередь, могут состоять из функциональных модулей. Состав подсистем АХЕ-10 показан на рисунке 2.
Рисунок 2 – Состав подсистем АХЕ-10
Подсистема SSS (subscriberswitchingsubsystem) - подсистема абонентского искания (АИ) управляет нагрузкой от абонентов, подключенных к станции. Предназначена для выполнения индивидуальных функций BORSCHT,а также групповых функций, к которым относятся:
– концентрация нагрузки в сторону GSS;
– прием адресной информации от номеронабирателя декадным кодом и многочастотным кодом.
Подсистема АИ комплектуется из абонентских модулей LSM, в каждый из которых можно включить:
– 128 аналоговых абонентских линий;
– 64 линии базового доступа 2В+D;
– 4 линии первичного доступа 30В+D.
16 LSM объединяются в блок SSS с максимальной емкостью 2048 абонентов. Подсистема SSS может быть местной (SSS) и (RSS) удаленной.
Подсистема GSS (groupswitchingsubsystem)– подсистема группового искания (ГИ). Устанавливает, контролирует и разъединяет соединения через ступень ГИ. Выбор пути через эту ступень определяется программными средствами.
Существует 4 варианта построения GSS:
1) емкость 512 трактов;
2) емкость 1024 тракта;
3) емкость 1536 трактов;
4) емкость 2048.
Для надежности ступень GSS имеет 2 плоскости (плоскость А и плоскость В). Информация передается через обе плоскости, но используется только с плоскости А. Если какой-то прибор из плоскости выйдет из строя ,он будет заблокирован. Обслуживание нагрузки на себя возьмет соответствующий прибор другой плоскости.
Подсистема TSS (trunkandsignalingsubsystem)– подсистема соединительных линий и сигнализации. Управляет сигнализацией и контролем связей с другими станциями. Функции TSS:
1) адаптация системы к различным системам сигнализации:
- выделенный сигнальный канал;
- общий канал сигнализации;
2) контроль и тестирование соединительных линий;
5) передача сигналов между внешними и внутренними программными обеспечением.
Подсистема CCS (common channelsignalingsubsystem)– подсистемасигнализацииОКС№7. Выполняет функции сигнализации, маршрутизации и контроля передачи и приема сигнальных сообщений.
Подсистема CPS (centralprocessorsubsystem)– подсистема центрального процессора. В состав подсистемы входят два одинаковых процессора СР-А и СР-В. каждый из которых имеет собственное ЗУ (рисунок 3). Процессоры работают в синхронном режиме. Обнаружение неисправностей, контроль аппаратных средств, испытание неисправных блоков осуществляет подсистема MAS (maintenancesubsystem).
Рисунок 3 – Структура подсистемы центрального процессора
ПодсистемаRPS (regionalprocessorsubsystem)– подсистема региональных процессоров. Региональные процессоры помогают (центральный процессор) при выполнении часто проводимых задач и передают в центральный процессор информацию о важных событиях, которые происходят в системе. Взаимодействие между центральными и региональными процессорами осуществляется через шину регионального процессора RPB. Региональный процессор принимает команды, проверяет на четность, но выполняет команду ведущей стороны (ведущего процессора). Для надежности все региональные процессоры удвоены и работают по принципу разделения нагрузки.
Подсистема I/O – подсистема ввода/вывода выполняет следующие функции:
- подключение абонентов;
- изменение категорий абонентов;
- вывод данных о тарификации;
- измерения;
- сохранение резервного ПО;
- распечатка сообщений об авариях и неисправностях;
- связь с центрами и технической эксплуатации ЦТЭ.
Лабораторная работа №12
Тема: «Цифровая автоматическая телефонная станция LineaUT»
Цель работы: Изучить цифровую телефонную станциюLineaUT.
Литература:
-
Р. Бленхут Быстрые алгоритмы цифровой обработки сигналов: Пер. с англ.-М.: Мир, 1989.-448с.: ил -
В.В. Крухмалев, В.Н. Гордиенко, А.Д Моченов Цифровые системы передачи: Учебное пособие для ВУЗОВ.-М.:Горячая Линия - Телеком, 200.-352с. -
Б.В Костров. Телекоммуникационные системы и вычислительные сети. - М: ТЕХБУК, 2006.-256с.