Файл: Лабораторная работа по дисциплине Инжиниринг технических систем автоматизированных процессов тема Моделирование работы манипулятора.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 17
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Саратовский государственный технический университет
имени Гагарина Ю. А.»
Институт машиностроения, материаловедения и транспорта
Кафедра «Техническая механика и мехатроника»
Лабораторная работа
по дисциплине
«Инжиниринг технических систем автоматизированных процессов»
тема:
«Моделирование работы манипулятора»
Выполнил:
Форма обучения: заочная________
Факультет: ИММТ_______________
Группа: б-АТППипу21___________
Номер зачетной книжки:212780___
ФИО студента:
Бура Чингиз Александрович
Вариант: 3______________________ Подпись Студента: _________
Проверил ФИО:
Виноградов Михаил Владимирович__
Отметка о зачете: _______________
Подпись преподавателя:_________
Саратов 2023
Исходные данные для выполнения практической работы.
| № вар | Параметры | Углы | Координаты | |||||
| Л1 | Л2 | Q1 | Q2 | Х | У | |||
| 3 | 20 | 20 | 20 | 30 | 55 | 20 | ||
Прямая задача кинематики
Прямая задача — это вычисление положения (X, Y) рабочего органа манипулятора по его кинематической схеме и заданной ориентации (1, 2) его звеньев ( — углы поворота).
Рассмотрим пример прямой задачи кинематики.
Введя исходные данные в обрабатывающую программу получим следующий результат:
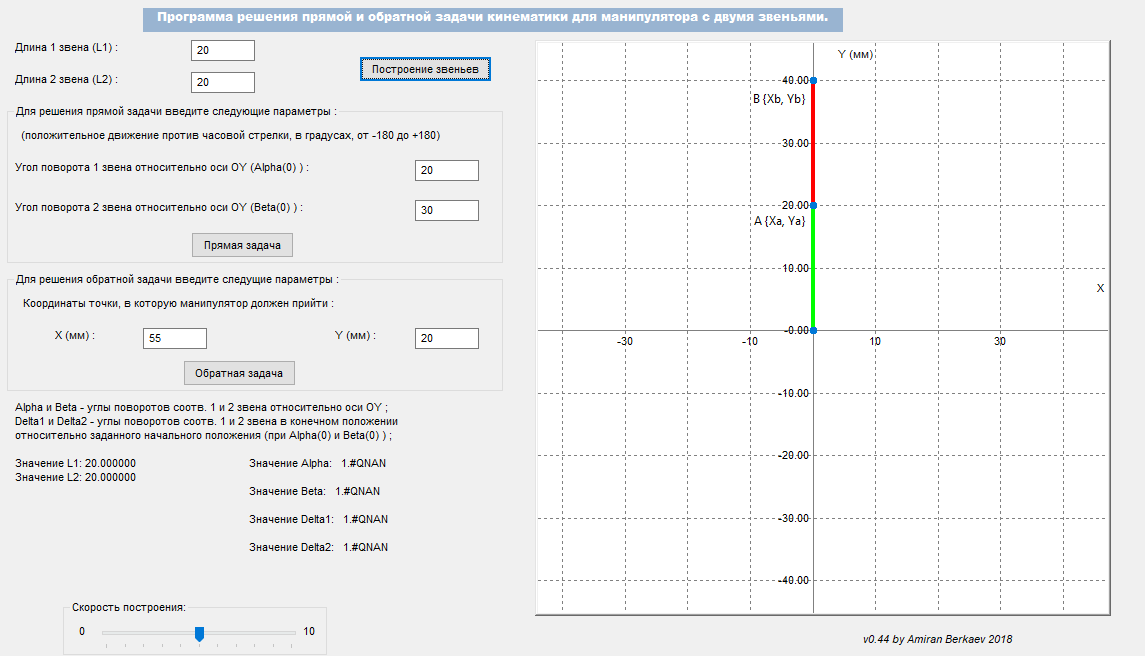
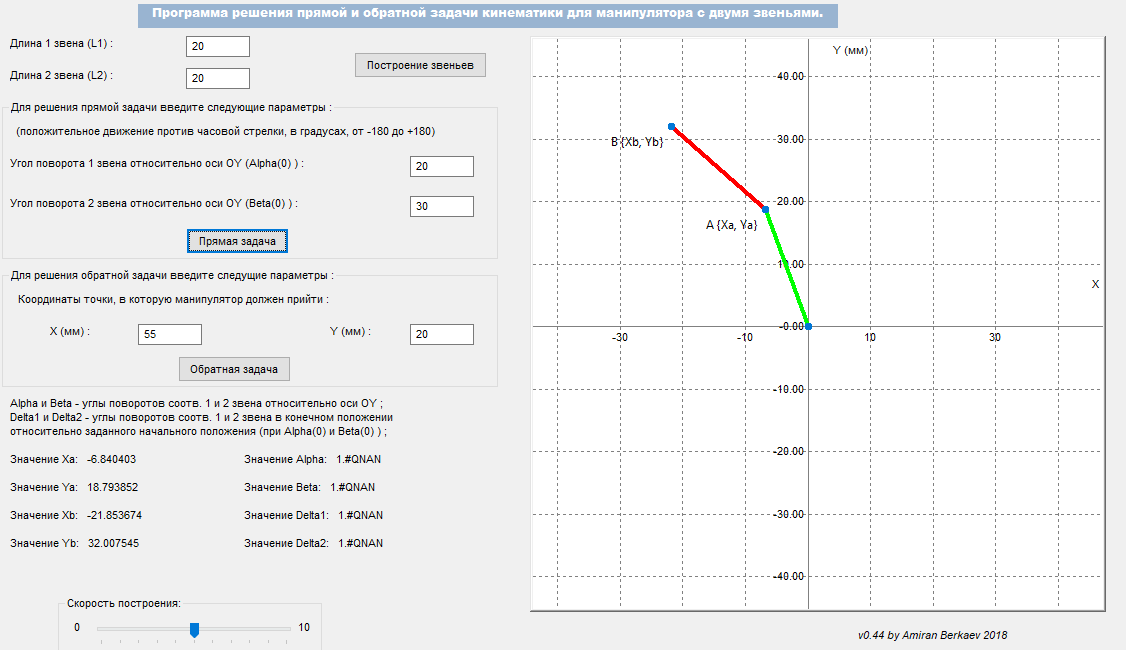
Здесь мы можем обратить свое внимание на то, что программа в автоматическом режиме рассчитала координаты конечного положения по заданной длине звеньев манипулятора, а также их углов.
Данные расчеты полностью равны тем расчетам, которые мы производили в ходе выполнения лабораторной работы.
Обратная задача кинематики
Обратная задача — это вычисление углов (Q1, Q2) по заданному положению (X,Y) рабочего органа и опять же известной схеме его кинематики.
Рассмотрим пример обратной задачи кинематики.
Используем тот же рисунок, но теперь нужно найти такие углы Q1 и Q2, которые позволят манипулятору со звеньями L1 и L2 поместить рабочий орган в заданную точку (x,y)
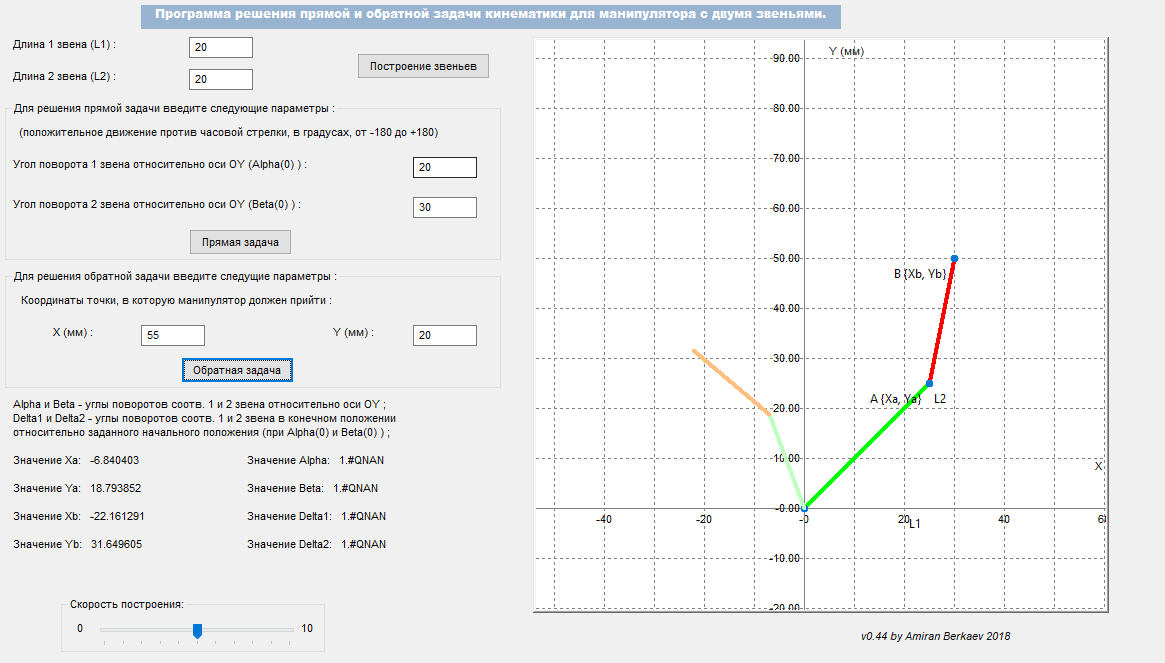
При использовании новых данных можно увидеть, что программа работает полностью корректно и конечная (захват) точка манипулятора достигает заданной точки.
Вывод: При обработке заданных данных программой результат полностью совпал с расчетами, которые мы выполняли в ходе решения практической работы.
ЛИТЕРАТУРА
1. Накано Э. Введение в робототехнику. - М. : Мир, 1988 -334 с.
2. Робототехника, учеб. пособие для вузов/ Под ред. И. М. Макарова. - М. : Высш. шк., 1986. - 176 с.
3. http://ru.wikipedia.org/wiki/Прямая_кинематика
4. http://ru.wikipedia.org/wiki/Инверсная_кинематика
5. http://ru.wikipedia.org/wiki/Принципиальная_кинематическая_схема
6. http://ru.wikipedia.org/wiki/Теорема_косинусов
7. http://ru.wikipedia.org/wiki/Тригонометрические_формулы
8. Robot Forward Kinematics