Файл: Закон классической механики Если скорость тела равна 0 или постоянна, то равнодействующая сила рана 0.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 26.10.2023
Просмотров: 40
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
-
Дифференциальные уравнения движения материальной точки. Прямая и обратная задача динамики
Закон классической механики
-
Если скорость тела равна 0 или постоянна, то равнодействующая сила рана 0 -
Ускорение, получаемое телом, прямо пропорционально действующей силе и обратно пропорционально его массе. (
Дифференциальные уравнения движения материальной точки – составленные из 2-ого закона ньютона и есть дифф…
Для решения соответствующей задачи динамики необходимо составить уравнения, устанавливающие зависимость между массой движущей точки, ее ускорением и действующими на нее ускорениями. Дифференциальное уравнение движения точки в векторной форме и имеет вид:
Задачи Динамики
-
Прямая задача динамики: по кинематическому характеру движения материальной точки определить силу (силы), вызывающую это движение. Или Просто определения равнодействующий силы. - равнодействиющий
- равнодействиющий -
Обратная задача динамики: По заданной силе (силам), действующим на материальную точку (материальный объект) определить кинематические параметры её движения. =
= =ma=F
=ma=F
-
Несвободное движение матер
точки в естественных координатах
-
Несвободное движение материальной точки – это такое движение вдоль кривой или поверхности, которое ограниченное какими-либо связями.
-
Пусть материальная точка движется по гладкой поверхности, имеющей вид f (x;y;z) = 0
Следовательно, на точку действует: F –активная сила , N – нормальная реакция.
Основное уравнение динамики имеет вид : m*a = F+N
Проектируя на оси координат, получим дифференциальные уравнения движения m
 =
=  +
+ , m
, m =
=  +
+ , m
, m =
=  +
+ . Из курса дифференциальной геометрии мы получим формулы :
. Из курса дифференциальной геометрии мы получим формулы : Где
Таким образом, мы найдем нормальную реакцию N :
 ;
;  ;
;
Обозначив

Эти дифференциальные уравнения называют дифференциальными уравнениями Лагранжа первого рода для движения несвободной материальной точки
-
Относительное движение материальной точки. Уравнения покоя
Во многих задачах динамики движение материальной точки рассматривается относительно системы отсчета.
По
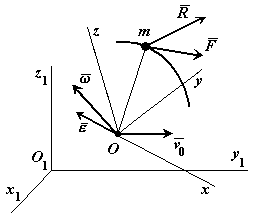 лучим дифференциальные уравнения движения материальной точки относительно подвижной системы отсчета.
лучим дифференциальные уравнения движения материальной точки относительно подвижной системы отсчета.где
Согласно теореме Кориолиса
Перепишем дифференциальное уравнение следующим образом
Материальная точка движется относительно неинерциальной системы отсчета так же как и относительно инерциальной, только к приложенным активным силам и силам реакции связей следует добавить кориолисову и переносную силу инерции.
Силы
Рассмотрим некоторые частные результаты.
1.
(ω-угловая скорость вращения подвижных осей Oxyz) и закон относительного движения принимает вид
-
пусть ,
,  то
то 
3 пусть
 то
то 
4.Теорема об изменении количества движения материальной точки.
Теорема: изменение количества движения материальной точки за некоторый промежуток времени равно импульсу приложенной к ней силы за тот же промежуток времени.
-
Количество движения материальной точки находится как , следовательно
, следовательно 
-
В проектирования на оси:
-

Частные случаи, следствия

-
При неупругом соударении
-
При упругом соударении
-
При реактивном движении
Над скоростью есть “_” знак вектороности.
5.Теорема об изменении кинетического момента.
Первая производная по времени от кинетического момента точки относительно какого-либо центра равна моменту силы относительно того же центра:
 ,
, 
Проецируя на прямоугольные декартовы оси координат, получаем теоремы об изменении кинетического момента точки относительно этих осей координат:
,
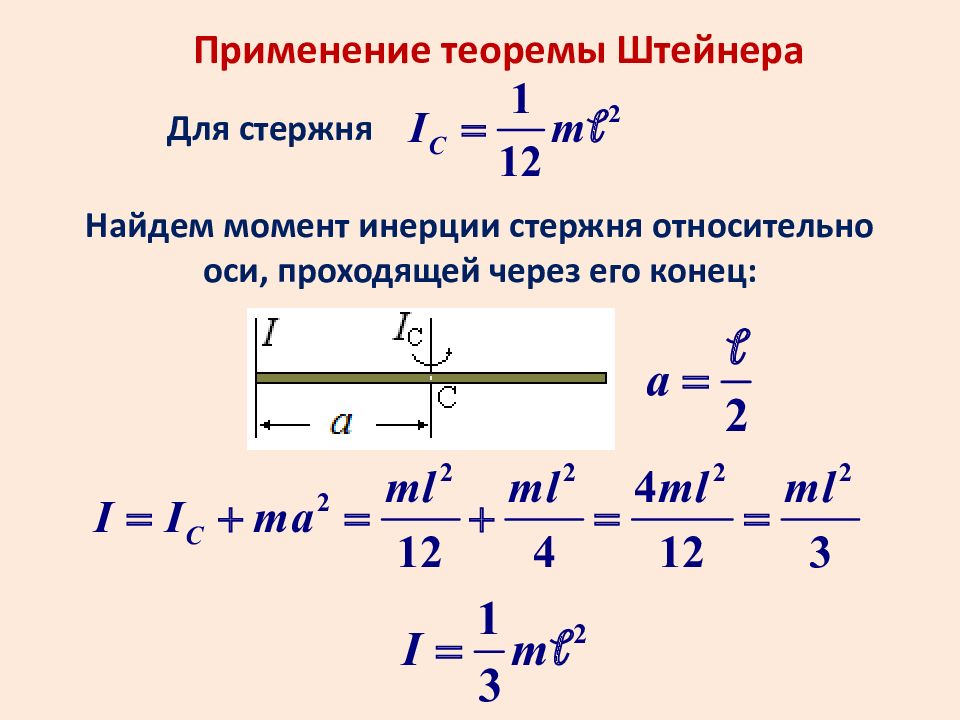
6 Момент инерции тела относительно оси. Теорема Гюйгенса-Штейнера.
 ,
, 
Момент инерции тела определяется его размерами, формой, распределением и величиной массы, а также положением оси вращения.
Найдем связь между моментами инерции относительно двух различных параллельных осей. Она устанавливается теоремой Гюйгенса-Штейнера: момент инерции тела относительно произвольной оси равен сумме момента инерции этого тела относительно оси проходящей через центр масс, параллельно данной и произведения массы на квадрат расстояния между осями.
Формула записывается во таким образом;

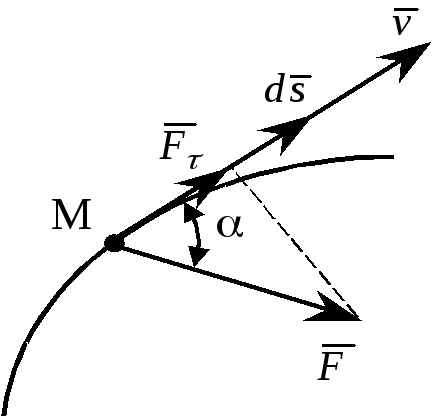
7. Теорема об изменении кинетической энергии для материальной точки.
Теорема: Изменение кинетической энергии материальной точки на некотором ее перемещении равно работе силы, действующей на точку, на том же перемещении.
Полная работа на некотором конечном перемещении определяется интегралом: A=

T=

Пусть материальная точка M массы m движется под действием силы F из положения M0 в положение M1. Основываясь на основное уравнение динамики, которая имеет вид:
Заменим