Файл: На сегодняшний момент сам процесс нанесения дорожной разметки на проезжую часть.docx
Добавлен: 06.11.2023
Просмотров: 10
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Актуальность:
На сегодняшний момент сам процесс нанесения дорожной разметки на проезжую часть –
не самая легкая задача. Ее необходимо выполнять точно и как можно с меньшей погрешностью. Про-
цесс разделен на два этапа: в начале наносится ориентировочная разметка и только после – основная,
что занимает довольно много времени. Кроме того, работа в темное время суток практически невоз-
можна, к тому же человеческий фактор всегда влияет на качество исполнения.
Потому актуальным является разработка автоматизированной системы нанесения дорожной
разметки, что позволит, во-первых, сократить штат рабочих на объекте (городская дорога, сообщение
между городами и т.д.); во-вторых, ускорить время выполнения работы путем исключения из рабоче-
го плана ориентировочной разметки и нанесения сразу основной; также использоватьвозможность
организовать работу в темное время суток за счет точности в ориентировании робота и его независимости от освещенности рабочей поверхности (дороги); в-третьих, повысить качество выполнения ра-боты, исключив влияние человеческого фактора
Датчики:

Bluetooth модуль HC-06 предназначен для беспроводного соединения контроллеров Arduino с другими устройствами, таких как телефон, ПК и другие совместимые Bluetooth устройства. Подключение Bluetooth HC-06 к Ардуино производится по UART к выводам RX и TX.
Характеристики:
-
Bluetooth V2.0 + EDR 3 Мбит -
Радиус действия - 10 метров -
Чувствительность -80dBm -
UART интерфейс с программируемой скоростью обмена -
Низкое напряжение питания 1,8 до 3,6 В -
Скорость по умолчанию: 38400, Data bits: 8, Stop bit: 1, Parity: нет. -
Полный набор AT команд
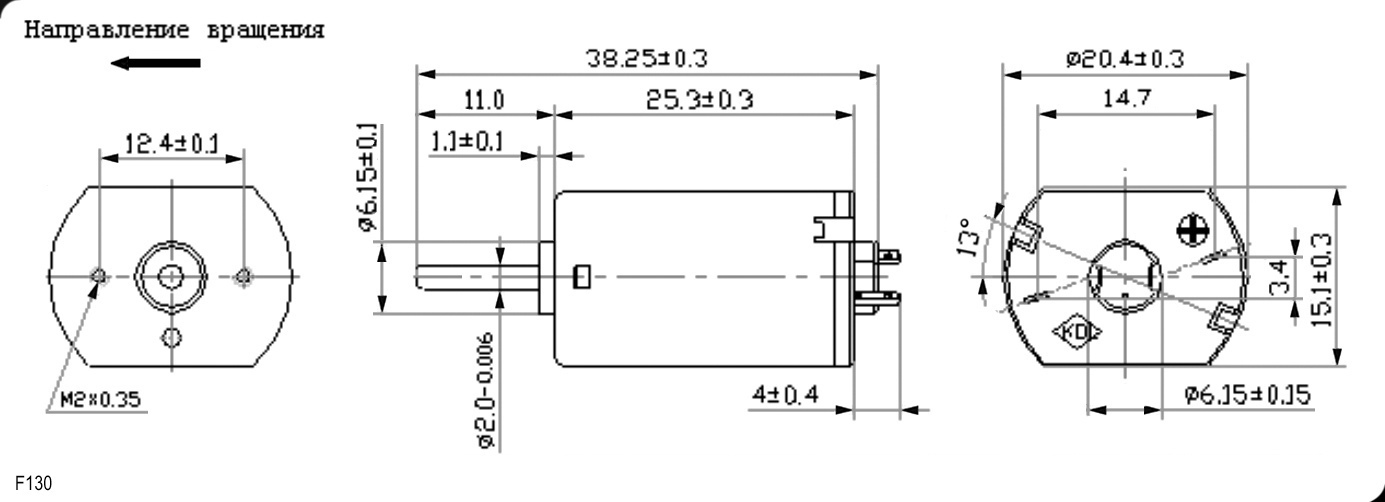
Электродвигатель F130-16155
Технические параметры
Диаметр вала-2 мм
Диаметр корпуса 20.4 мм
Диапазон рабочего напряжения 1…5 В
Дополнительно момент остановки-63 гc см; ток остановки-1.2 А
КПД 53.5%
Мощность 0.67 Вт
Номинальное напряжение 4.5 В
Тип коллекторный электродвигатель постоянного тока
Холостой ход скорость-8450 об/мин; ток х.х.-0.065 А
Вес, г 17
Характеристики: Все характеристики
Высота, mm 15,1
Глубина, mm 40,3
Напряжение, V 4,5
Артикул 55512
Диаметр, mm 20,4
Мощность, W 0,67
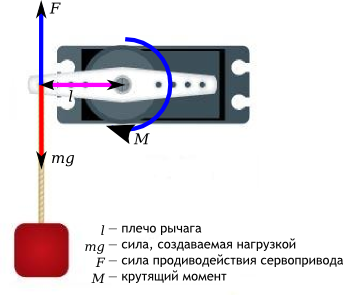
Аналоговый серводвигатель MS-1.3-9

Серводвигатель MS -1.3-9 представляет собой электродвигатель с блоком управления, который за счёт обратной связи может точно поддерживать заданное положение вала или постоянную скорость вращения. Используются чтобы аккуратно приводить в действие различные механизмы. К примеру, сервомотор даст возможность роботу управлять руками или вращать головой.
Характеристики серводвигателя
1.1 Крутящий момент
Крутящий момент представляет собой произведение силы на длину рычага. Другими словами, он показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Например, крутящий момент серводвигателя MS-1.3-9 равен 1,3 кг·см, это означает, что серводвигатель удержит в горизонтальном положении рычаг длиной 1 см с подвешенным грузом 1.3 кг на свободном конце. Или, что равносильно, удержать рычаг длиной 1.3 см с подвешенным грузом 1 кг.
1.2 Скорость поворота
Скорость сервопривода выражается через время, за которое выходной вал успеет повернуться на 60°. Характеристика 0,12 с/60° означает, что серводвигатель поворачивается на 60° за 0,12 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что чаще всего используют именно интервал времени поворота на 60°.
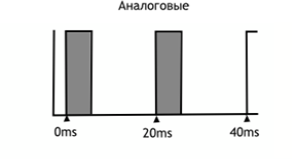
1.3 Внутренний интерфейс
В аналоговом серводвигателе входные данные анализируются логической микросхемой: сравнивается текущее и необходимое положения двигателя, и на основании разницы даётся команда изменить положение. Время реакции составляет порядка 20 мс, поскольку импульс подаётся с частотой 50 Гц. Полученный сигнал определяет, когда и в какую сторону вращать двигатель.
1.4 Технические параметры
- Диапазон вращения: 180°;
- Угол поворота;
- Тип компонента: сервомотор
- Напряжение питания: 4.8…6В;
- Крутящий момент: 1.3 кг.см при 4.8 В;
- Скорость вращения: 60° за 0.12 сек при 4.8 В;
- Внутренний интерфейс: аналоговый;
- Направление: CCW (против часовой стрелки);
- Нужного импульса: 900us-2100us;
- Материал шестерней: нейлон;
- Материал корпуса: пластик;
- Длина проводов: 20 см;
- Габариты: 23.2 x 12.5 x 22 мм;
- Вес: 9 г.
аккумулятор — вторичный химический источник тока многоразового действия, который может быть вновь заряжен после разряда. Для заряда аккумулятора электрический ток пропускается в направлении, обратном направлению тока при разряде.
Аккумулятор выполняет три функции. Основанная функция – это запуск систем, блоков. Также, батарея питает бортовые электрические устройства – при неработающем двигателе. Вторая важная функция – возможность аварийного питания, источником которого аккумулятор выступает в случае поломки генератора.
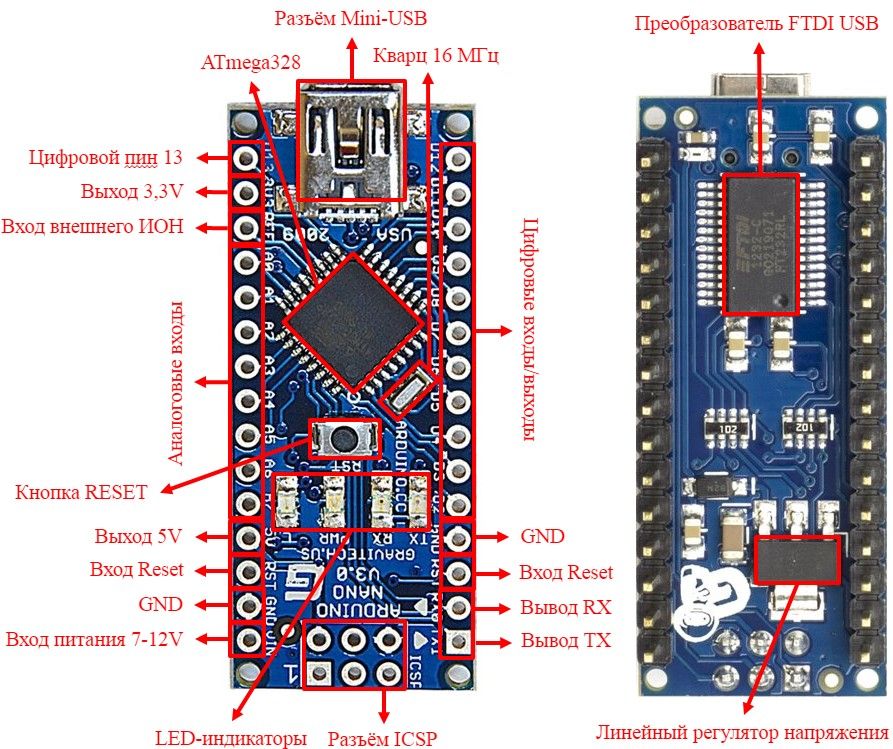
Arduino — это небольшая управляющая плата с собственным процессором и памятью. В процессор Ардуино можно загрузить программу, которая будет управлять всеми этими устройствами по заданному алгоритму.
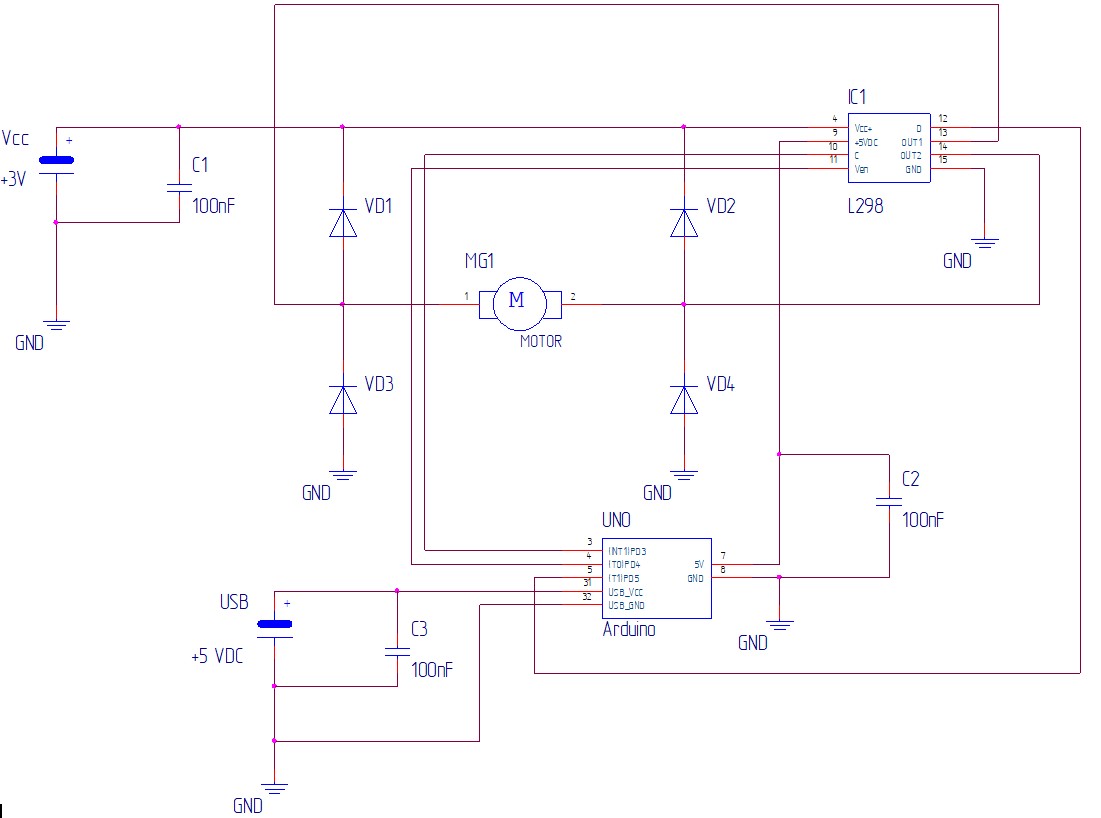
Электрическая схема:
Конструктивно функциональная структура
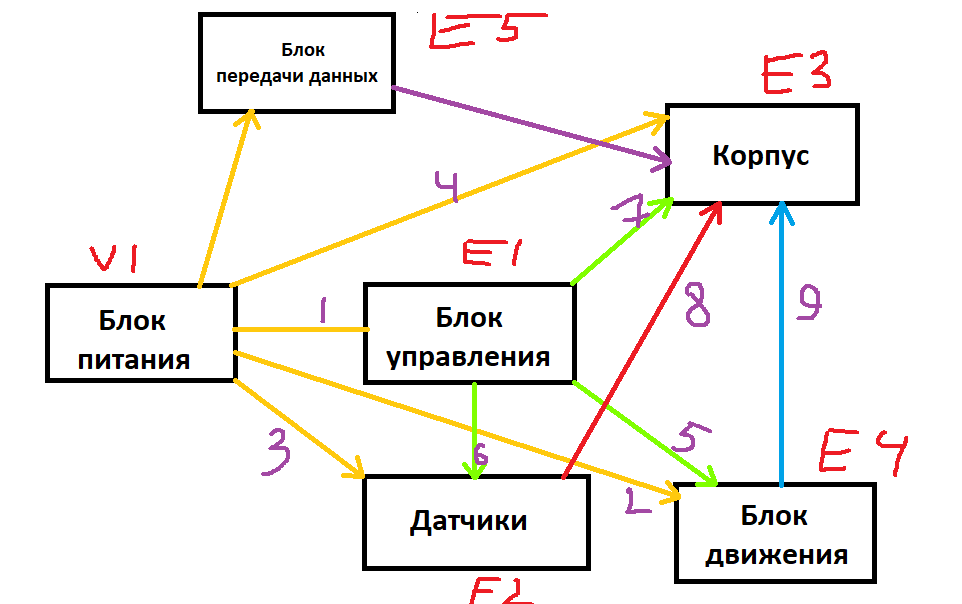
| V1 – блок питания | Функция робота: делать разметку |
| | |
| E1 – блок управления | V1-Ф1 питает Е1 |
| Е2 – датчики | V1-Ф2 питает Е4 |
| Е3 - корпус | V1-Ф3 питает Е2 |
| Е4 – блок движения | V1-Ф4 питает Е3 |
| Е5 – Блок передачи данных | V1-ф10 питает Е5 |
| | Е5-Ф11 присоединяется к Е3 |
| | Е1-Ф7 присоединяются к Е3 |
| | Е1-Ф5 управляет Е4 |
| | Е4-Ф9 присоединяется к Е3 |
| | Е1-Ф6 управляет Е2 |
| | Е2-Ф8 присоединяется к Е3 |
| | |
| | |
Математические функции
Математическая модель движения колесного робота предполагает знание геометрии.
Функция черчения. Робот может рисовать различные геометрические фигуры на ровной горизонтальной поверхности с помощью серводвигателя. Так же может рисовать диаграммы.
Робот может рисовать как по заданным параметрам программы или с помощью дистанционного управления.
Заключение
Исходя из вышеперечисленных функций, можно сделать вывод что робот является узко направленным в сфере черчения, так как он может чертить только на ровной горизонтальной поверхности.