ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.11.2023
Просмотров: 47
Скачиваний: 4
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
ЛАБОРАТОРНАЯ РАБОТА №4
“Расчет валов”.
4.1. Силы в зацеплении
Деформация сдвигов валов происходит под действием сил, возникающих в процессе работы той или оной передачи масс самого вала и насаженных на него деталей. Однако в передачах, разрабатываемых в данной работе, роль масс невелика, поэтому их влиянием можно пренебречь.
Очень важно правильно направить усилия, действующие на вал, ибо, как известно, направление действия сил влияет на значение и направление опорных реакций. Для проверки правильности направления усилий, действующих в зацеплениях, необходимо представить в аксонометрии кинематическую схему редуктора с указанием направления вращения валов и действующих усилий (Рис. 4.1), учитывая при этом что вал приводного электродвигателя вращается против часовой стрелки
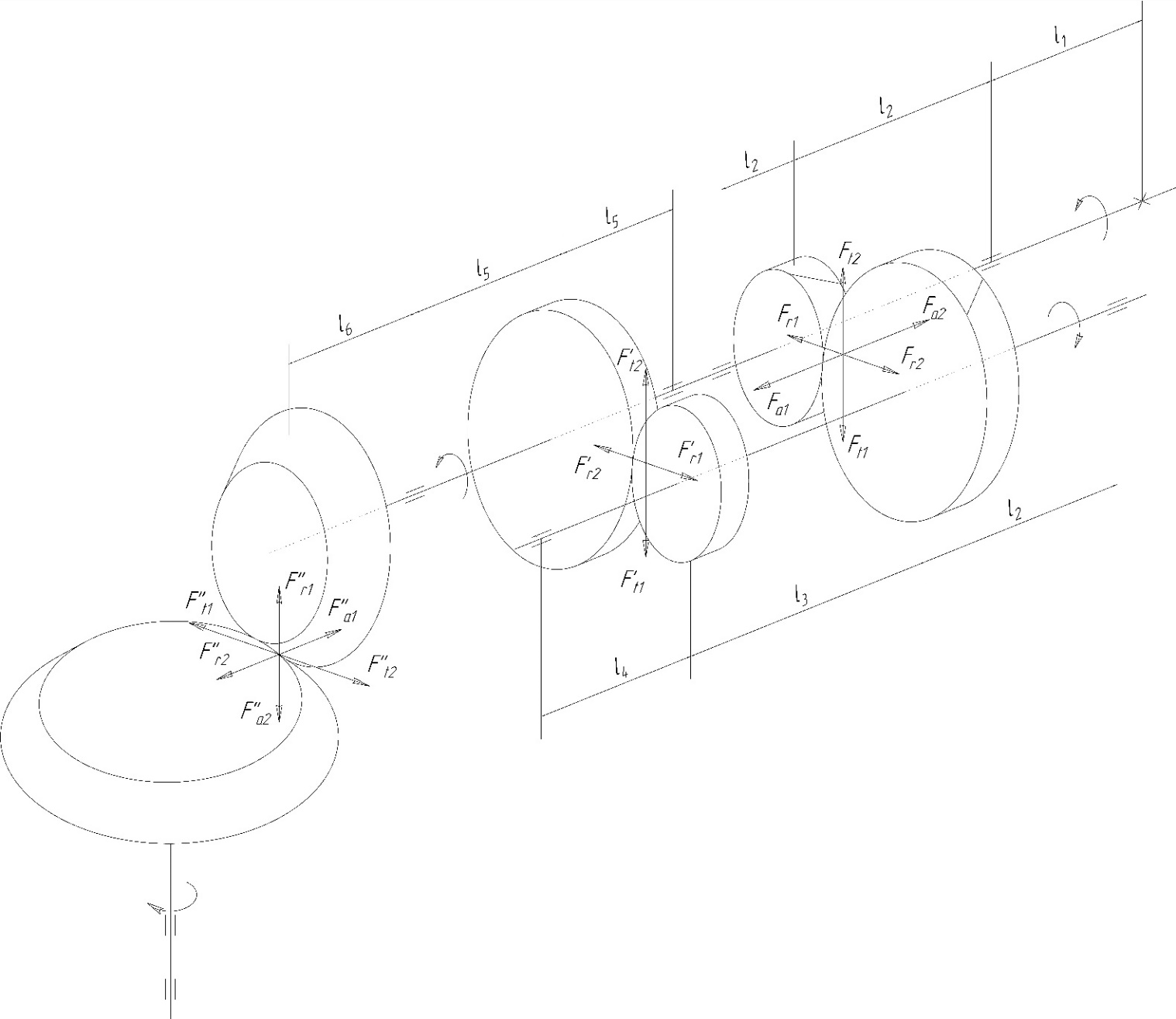
Рис. 3. Аксонометрическая схема привода.
В цилиндрической косозубой быстроходной передаче силу в зацеплении раскладывают на три составляющие:
Окружное усилие


Радиальное усилие, где в данной косозубой передаче, где



Осевое усилие


Сосредоточенные моменты от осевых усилий


В цилиндрической прямозубой передаче силу в зацеплении одной пары зубьев раскладываются на две взаимно перпендикулярные составляющие:
Окружное усилие т/х передачи


Радиальное усилие т/х передачи


В данном редукторе открытая коническая передача и для ней усилия обозначаются с двумя штрихами будут равны:
Окружное усилие:



Радиальное усилие на шестерни и равное ему осевое усилие на колесе


Радиальное усилие на колесе и равное ему осевое усилие на шестерне


Сосредоточенные моменты от осевых усилий


4.2. Расчет быстроходного вала.
4.2.1. Проектировочный расчет вала.
Предварительным расчетом определяется диаметр вала в опасном сечении из условия прочности его на изгиб с кручением. Действительные условия работы вала заменяются условными, производится схематизация нагрузок, опор, формы вала. Вследствие такой схематизации расчет валов становится приближенным.
При составлении расчетной схемы вал может быть представлен как балка на шарнирных опорах. Подшипник, воспринимающий одновременно осевые и радиальные усилия, заменяется шарнирно-неподвижной, а подшипник, воспринимающий только радиальное усилие – шарнирно-подвижной опорами. Все действующие силы приводятся к оси вала и раскладываются на составляющие в вертикальной и горизонтальной плоскостях.
В вертикальной плоскости на вал действуют: окружное усилие на косозубой шестерне
 . Эти силы могут быть перенесены в центр вала с добавлением крутящего момента.
. Эти силы могут быть перенесены в центр вала с добавлением крутящего момента.В горизонтальной плоскости действуют: радиальные усилия на косозубой шестерне
 , которые могут быть перенесены в центр вала по линии действия, и осевое усилие
, которые могут быть перенесены в центр вала по линии действия, и осевое усилие 
на косозубой шестерни, которое при приведении его к оси вала дает сосредоточенный момент
 .
.4.2.1.1. Реакции опор в горизонтальной плоскости


Проводится проверка равновесия балки в горизонтальной плоскости:

Погрешность вычисления сил, составила менее 5%
Строится эпюра изгибающих моментов в горизонтальной плоскости. Изгибающие моменты в точках C иDзапишутся:


В точке D на эпюре моментов имеет место скачок момента на величину
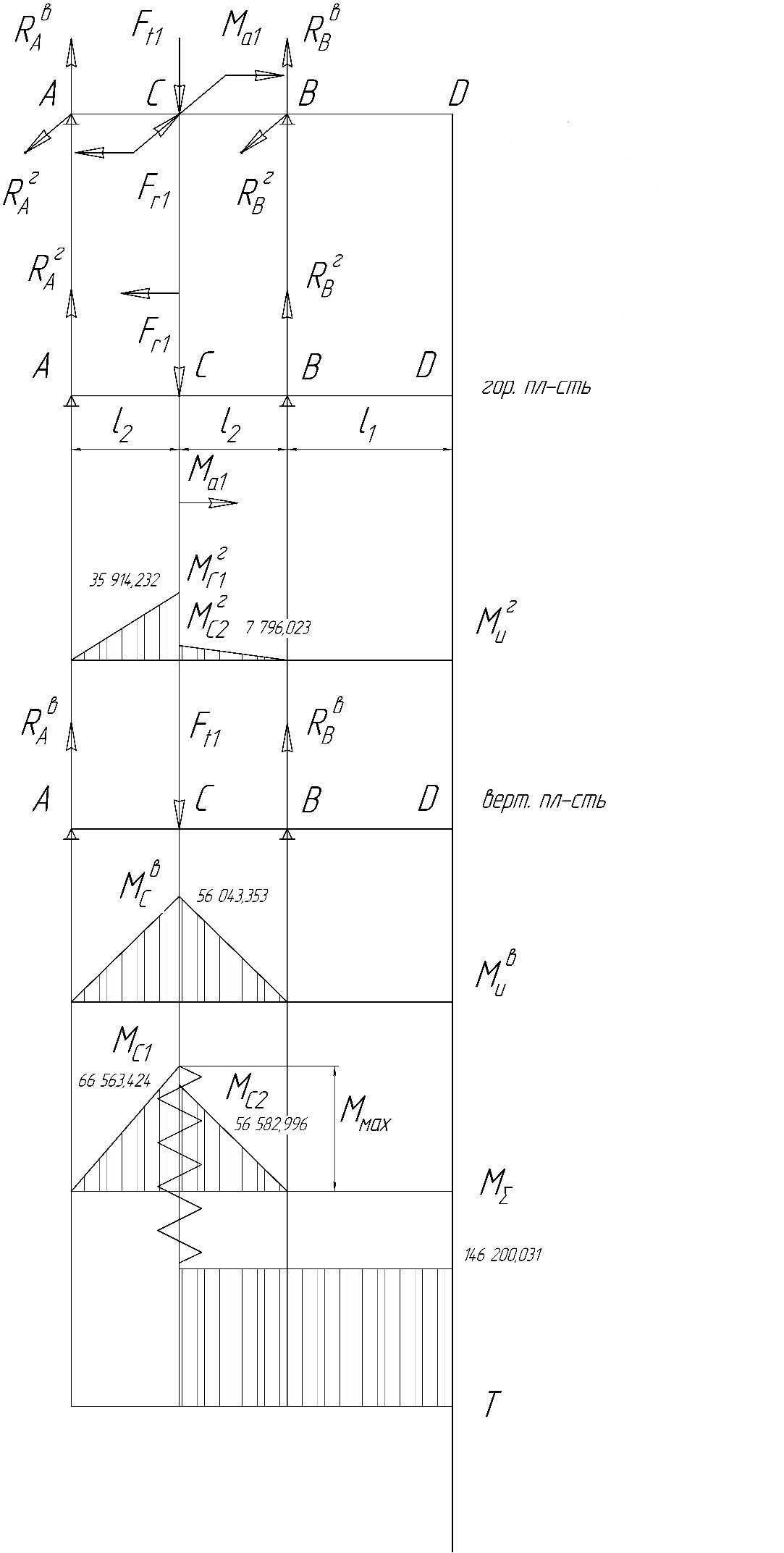
Рис. 4.1. Эпюры моментов на быстроходном валу
4.2.1.2. Реакции опор в вертикальной плоскости


Проводится проверка равновесия балки в горизонтальной плоскости:

Погрешность вычисления сил, составила менее 5%
Строится эпюра изгибающих моментов в горизонтальной плоскости. Изгибающие моменты в точках C иDзапишутся:

4.2.1.3. Эпюра суммарного изгибающего момента
Суммарный изгибающий момент определяется путем геометрического суммирования изгибающих моментов в вертикальной и горизонтальной плоскостях:


4.2.1.4. Эпюра крутящего момента T,


4.2.1.5. Приведенный момент
В опасном сечении вала (где действует наибольший суммарный изгибающий момент) определяется приведённый момент, учитывающий совместное действие изгиба и кручения:

Здесь
 – коэффициент, который учитывает, что нормальные напряжения изменяются по симметричному, а касательные напряжения – по пульсирующему циклам. В данном случае передача, как и редуктор, реверсивная, где касательные напряжения изменяются также по симметричному циклу,
– коэффициент, который учитывает, что нормальные напряжения изменяются по симметричному, а касательные напряжения – по пульсирующему циклам. В данном случае передача, как и редуктор, реверсивная, где касательные напряжения изменяются также по симметричному циклу,  .
.
4.2.1.6. Диаметр вала в опасном сечении
Из условия прочности вала на изгиб с кручением определяется в опасном сечении:

Для стали 45
 .
.Диаметры участков вала, на которых будут крепиться детали посредством шпонок, должны быть увеличены на (8…10) мм для компенсации ослабления сечения вала.
Величина диаметра вала округляется до ближайшего большего значения по
ГОСТ 6636-69.
Примем что вал будет изготавливаться из стали 45, тогда диаметр вала в точке С по этому условию должен быть равен:

Но размер вала электродвигателя равен 38 мм, тогда по ГОСТ 6636-69 выбирается
 с шероховатостью Ra10, для удобства посадки подшипника.
с шероховатостью Ra10, для удобства посадки подшипника.4.2.1.7. Определяются суммарные реакции в опорах:


4.2.2. Конструкция вала
Валы выполняются ступенчатой по длине, что диктуется условиями сборки (при ступенчатой форме вала детали свободно проходят по нему до своего посадочного места). Разность диаметров ступеней желательно делать не более 5 мм.
Длина ступиц колес, звездочек, шкивов рекомендуется в пределах

Ступица зубчатых колес, распорные втулки на 1…2 мм должны быть больше своего посадочного места для лучшей фиксации деталей и более точной передачи осевого усилия на подшипниках.
Длина шпонки принимается конструктивно на (3…5) мм меньше длины ступицы посаженной детали для лучшего центрирования. При смазке подшипников консистентной смазкой, закладываемой через крышки подшипников, между распорной втулкой и внутренним кольцом подшипника ставится кольцо.
Диаметр быстроходного вала в опасном сечении (I-I) из предварительного расчета получен равным 30,796 мм, но, учитывая диаметр электродвигателя, для удобства посадки подшипников принят равным 40 мм.
Проверяем соотношения диаметра вала и диаметра впадин шестерни для определения необходимости изготовления вала-шестерни:

Значит необходимо быстроходный вал необходимо изготавливать по стандартной схеме
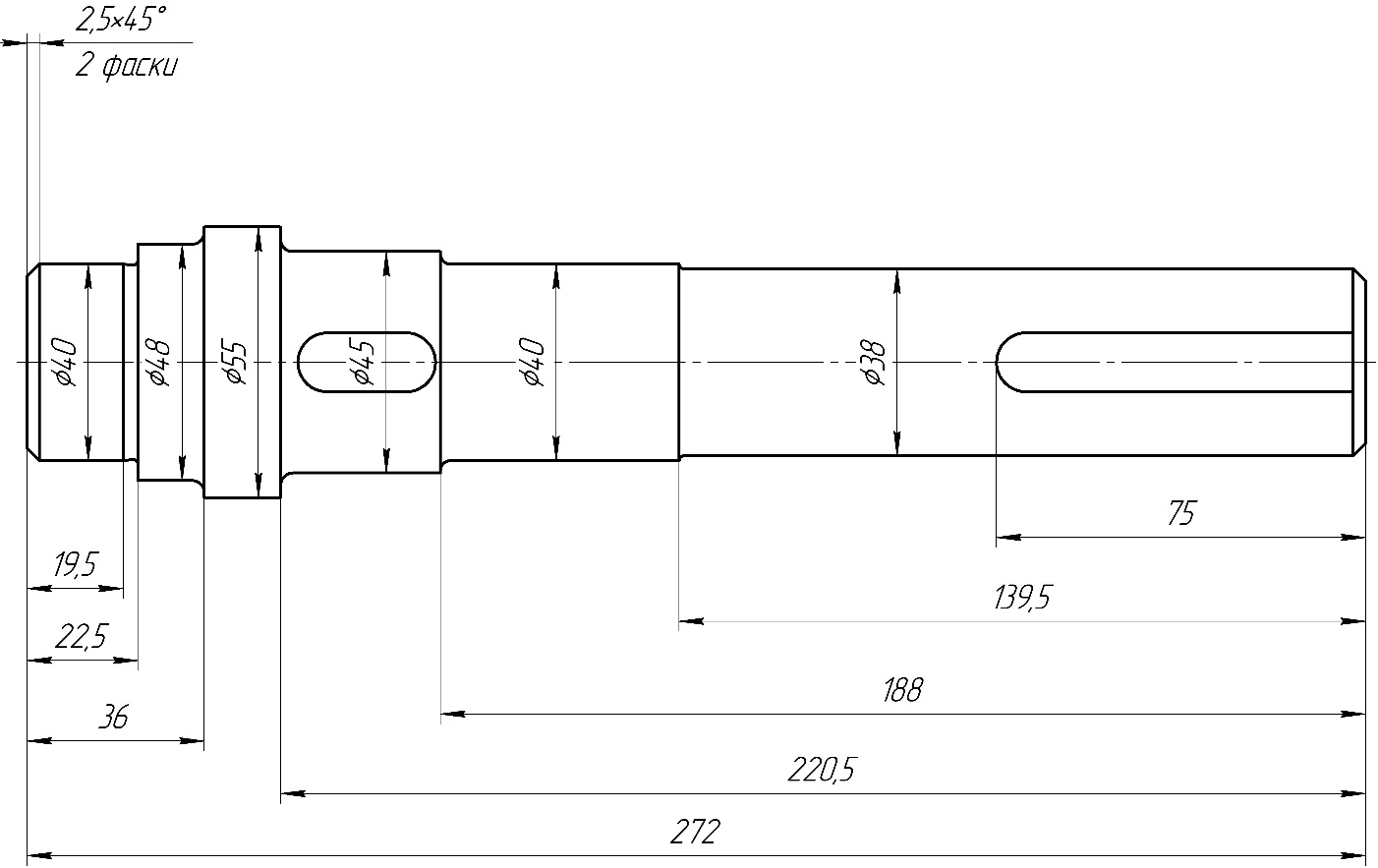
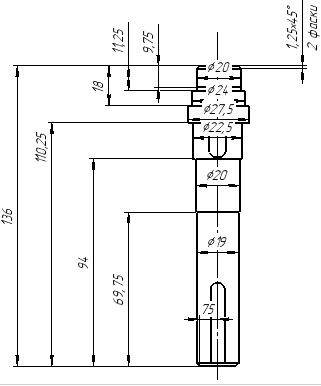
Рис. 4.2.
4.3. Расчет промежуточного вала.
Проектировочный расчет вала
Реакции опор в горизонтальной плоскости


Значит выбранное направление вектора противоположно истинному. Поэтому на эпюре следует направить вектор
 вниз, для правильного построения эпюр
вниз, для правильного построения эпюр

В данном случаем ситуация с вектором
 аналогична с предыдущей.
аналогична с предыдущей. Проводится проверка равновесия балки в горизонтальной плоскости:

Погрешность вычисления сил, составила менее 5%
Строится эпюра изгибающих моментов в горизонтальной плоскости. Изгибающие моменты в точках C иDзапишутся:



В точке D на эпюре моментов имеет место скачок момента на величину
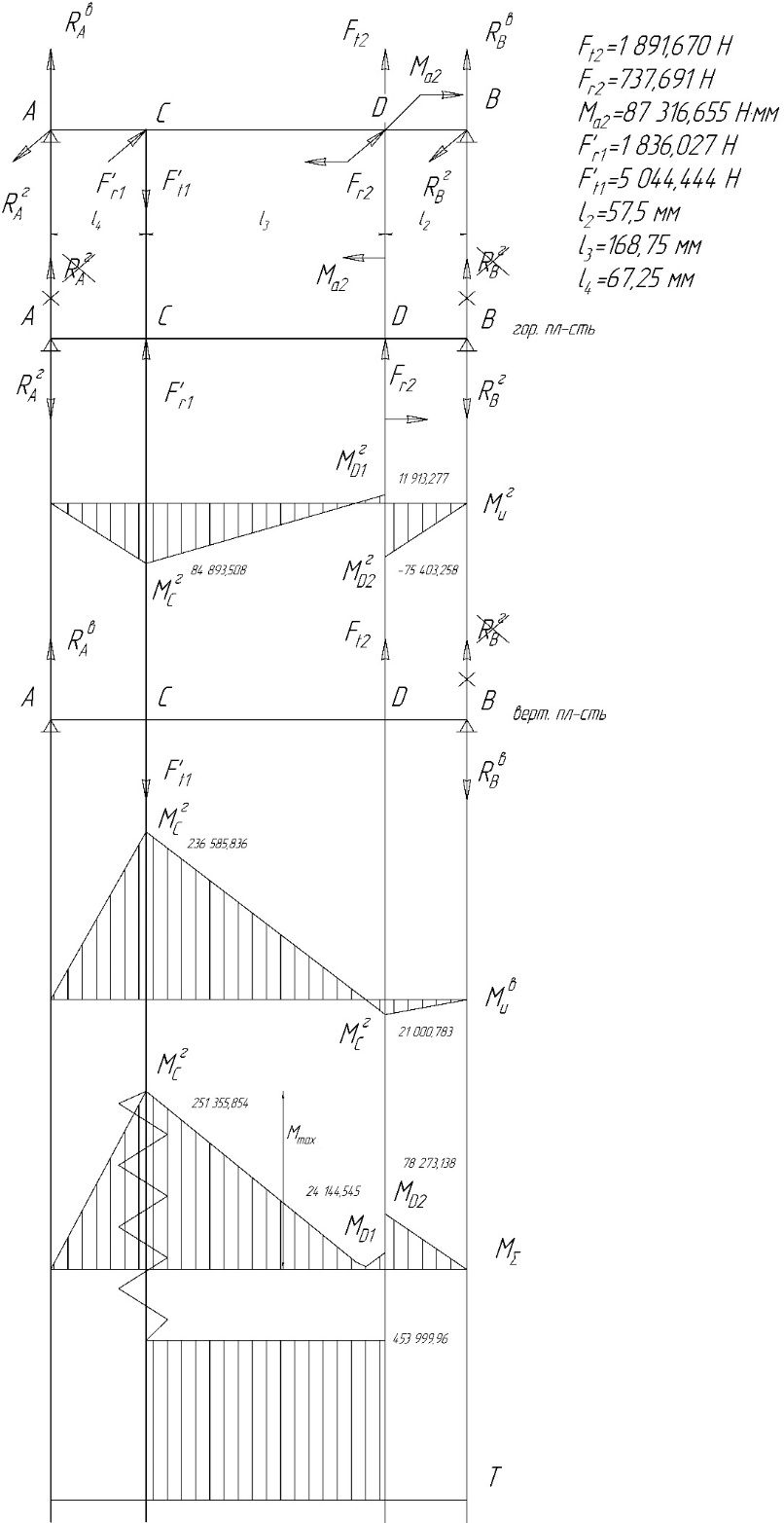
Рис. 4.6. Эпюры моментов на промежуточном валу