Файл: Электра приводы в авто, мота технике, выбор электромотора.docx
Добавлен: 07.11.2023
Просмотров: 38
Скачиваний: 2
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Очевидно, что стартовать на электромобиле со всего потенциала крутящего момента, который гораздо мощнее многих автомобилей с ДВС, никто не будет. По меньшей мере, это небезопасно, и что немаловажно это влечет неэффективный расход заряда батарей. Поэтому традиционно электродвигатели должны отвечать следующим требованиям:
иметь безопасное и удобное для эксплуатации строение;
обладать гарантией длительной эксплуатации;
иметь компактные габариты.
В современных автомобилях с электрической тягой серийного производства наиболее часто используют три типа электрических двигателей.
Асинхронные двигатели – моторы непостоянного тока, в которых скорость вращения ротора различается с потенциалом напряжения магнитного поля, созданным источником питания. Различают одно, двух и трехфазные агрегаты асинхронного типа.
Синхронные двигатели – электромотор, работающий на переменном токе, с движением ротора полностью симметричным электромагнитному полю. Подобные электродвигатели используют при повышенных мощностях. Различают шаговые и вентильные синхронные электродвигатели. Для первых характерно точное расположение ротора с подачей питания на конкретную обмотку, а чтобы изменить положение ротора, напряжение между обмотками необходимо перенаправить.
Двигатель–колесо – тип электромотора сила напряжения и крутящий момент которого рассчитан на конкретное колесо. Данный тип электропривода часто используется в плагин–гибридных автомобилях в рабочем тандеме с двигателем внутреннего сгорания.
Что касается регулировок управления электродвигателя, то за преобразование постоянного тока от аккумуляторных батарей в трехфазный переменный – отвечает инвертор. Трансмиссия – выполняющая роль сцепления и коробки передач, зачастую представлена одноступенчатым зубчатым редуктором. Остальные параметры работы электродвигателя регулируют электронная система управления, которая индивидуальна для каждой марки электрокара или гибрида. [8]
Конструкции синхронных двигателей с постоянными магнитами: a: магниты на поверхности, b: вставленные магниты, c:внутренние магниты
3.3.Кинематика электромобиля
На автомобиль действуют различные силы влияющие на поведение электропривода. Среди этих сил выделяют аэродинамическое сопротивление F
l, части весовых сил FgF и FgR, действующие в направлении движения, контактная сила между колесом и землей в направлении движения Fx и сопротивление качению, которое упрощается как находящееся в точке контакта с колесом момент Tr.
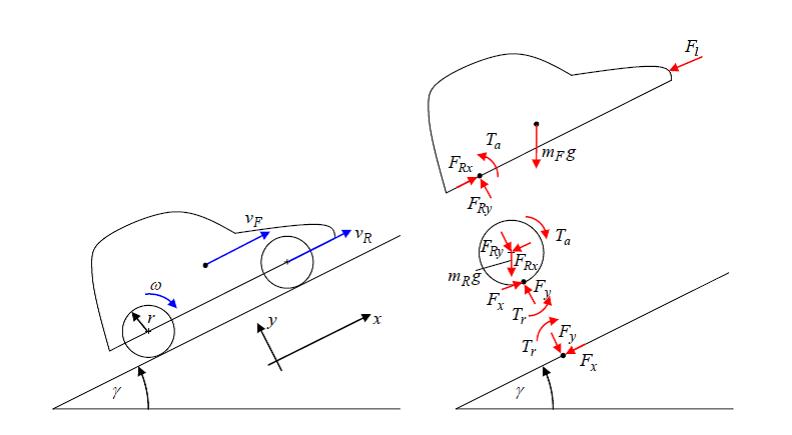
Рисунок 3 – Силы и крутящие моменты, действующие на транспортное средство
Динамика транспортного средства сводится к следующим уравнениям:
FRx – сила взаимодействия между колесом и шасси в направлении движения, Ta – вращающий момент, действующий на колесо. Модель упрощается, если предположить, что все ведущие колеса ведут себя одинаково. Они суммируются только в общих чертах с полной инерцией вращения. В случае необходимости, можно подумать о других вращающихся компонентах (валах, передачах) приводов. В дополнение к динамическим уравнениям необходимо учитывать кинематические уравнения. Автомобиль и колесо движутся с одинаковой скоростью, поэтому
Таким образом, можно преобразовать два поступательных динамических уравнения
Вращающий момент и вращающий момент сопротивления трения качения могут быть преобразованы в соответствующие мнимые силы:
Это приводит к системе уравнений
Предполагая, что колесо имеет идеальное проскальзывание
Результирует в уравнениях движения всего транспортного средства
Сила
также называется полным сопротивлением. Таким образом, уравнение движения получает простую форму
причем
В установившемя состоянии получаем
Кроме того, баланс сил в направлении v обеспечивает нормальную силу контактной точки колеса
Зависимость силы сопротивления от скорости показывает рисунок 4.
Для задействованных сил и крутящих моментов можно найти следующие допущения [9]
аэродинамическое сопротивление
сопротивление качению
вес
где,
pl – удельная плотность воздуха
AF – эффективная площадь поперечного сечения транспортного средства
cw – коэффициент аэродинамического сопротивления
cr – коэффициент сопротивления качению
Fl – аэродинамическое сопротивление
g – ускорение свобоного падения
γ – угол наклона
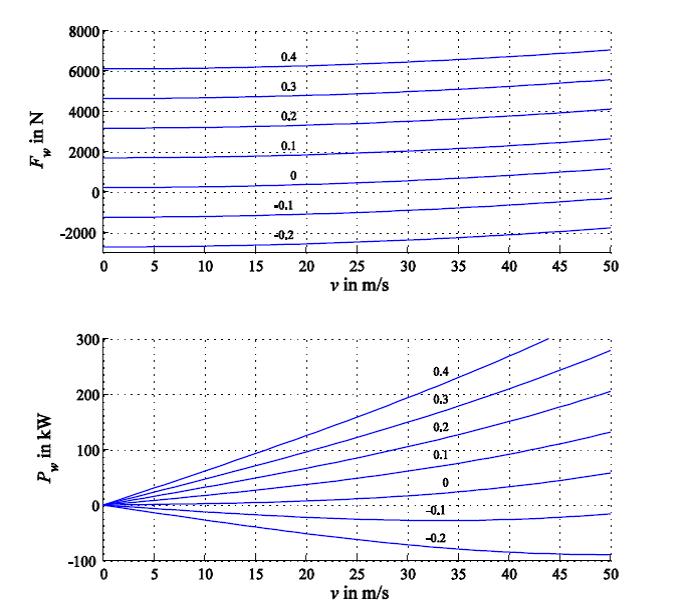
Рисунок 4 – Зависимость силы сопротивления и мощности от скорости для транспортного средства с m = 1500 кг, cw = 0,3, A = 2m2, cr = 0,015
3.4.Моделирование системы электропривода
В данной модели изменяется угол наклона и скорость. Переходные процессы представлены на Рисунке 5. С помощью этой модели можно наблюдать процесс движения расчетного электромобиля. Рисунок 5 показывает, что на угол наклона пути заметно влияют переходные процессы. По мере того, как угол наклона пути увеличивается, увеличивается и момент двигателя.
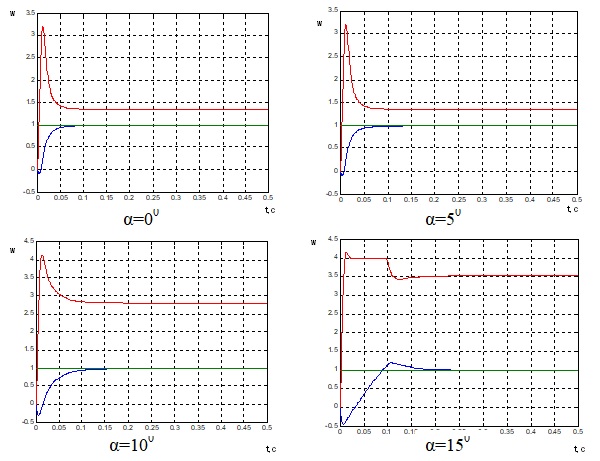
Рисунок 5 – Переходные процессы угловой скорости и вращающего момента, зависящие от угла наклона траектории пути a
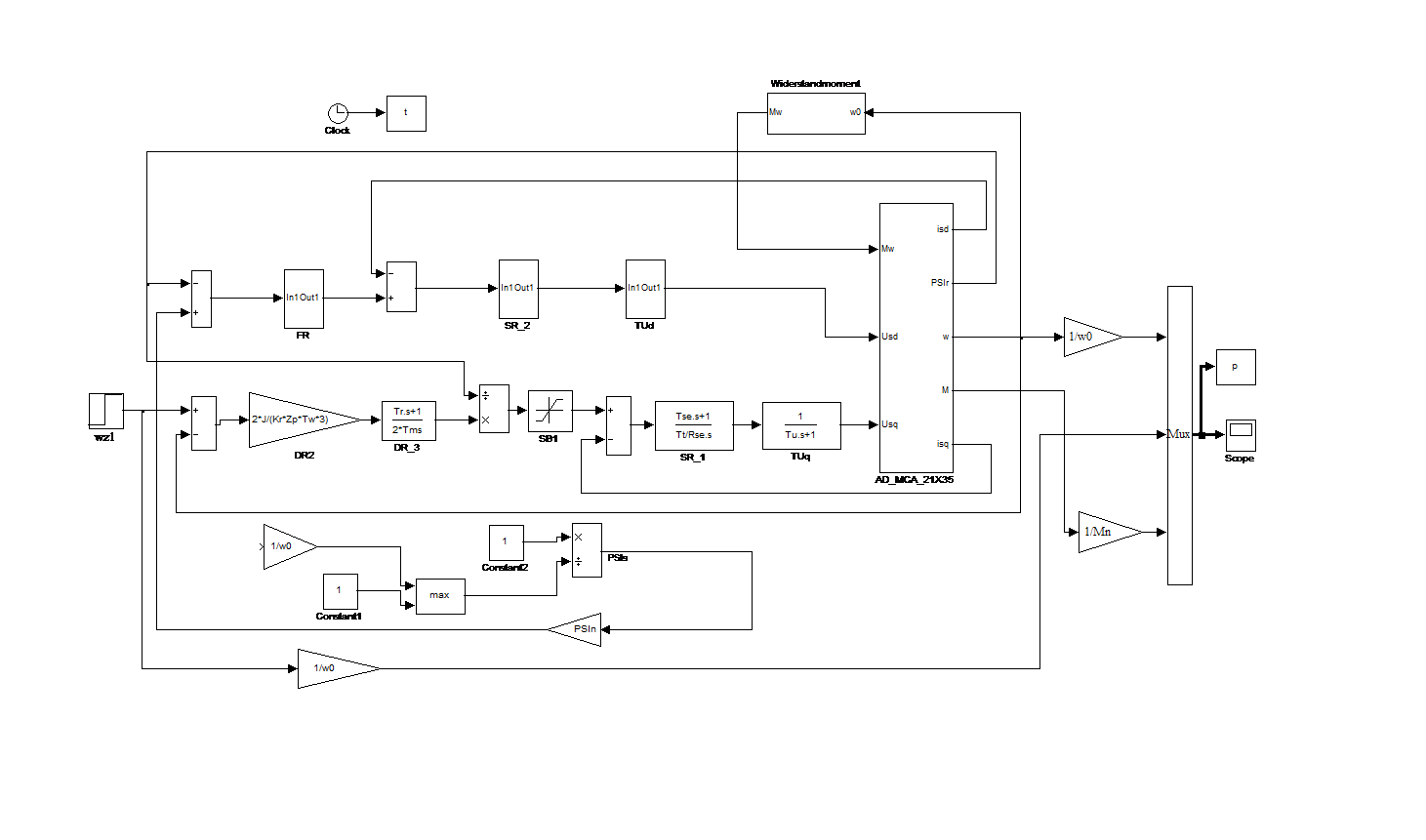
Рисунок 6 – Модель электроприводной системы для электромобиля в Simulink
На рис. 7 показана принципиальная схема системы привода электромобиля, включающая в себя аккумулятор, преобразователь частоты, мотор колесо. [10]
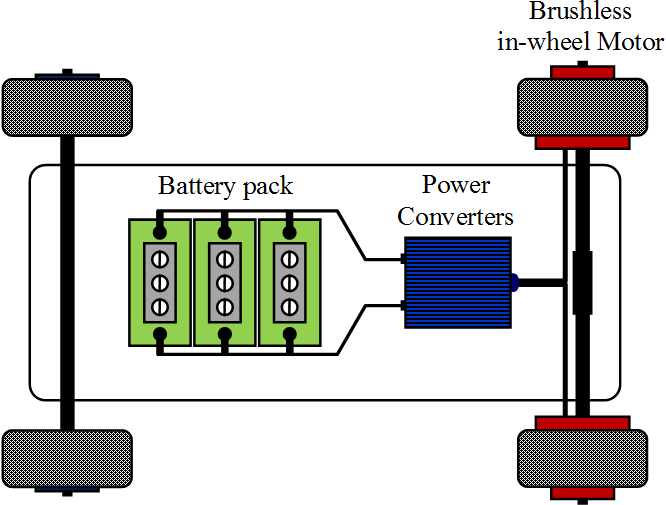
Рисунок 7 – Принципиальная схема системы привода электромобиля
Выводы
В данном реферате были рассмотрены важные аспекты будущей магистерской работы. Была описана история развития электромобиля, компоненты системы электропривода, кинематика движения, используемая модель . Рассмотрены аккумуляторы электромобиля и системы из зарядки.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
Ю.А. Хегай/Перспективы развития электромобилей и автомобилей-гибридов//Теория и практика общественного развития – 2014 – №20)
О.Ю. Карямян,К.А. Чебанов,Ж.А. Соловьева/Электромобиль и перспективы развития//Фундаментальные исследования – 2015 – №12)
Ю. В. Трескова/Электромобили и экология. Перспективы использования электромобилей // Молодой ученый. – 2016. – №12. – С. 563–565.
Электромобили – история и современность.//HUMAN – Режим доступа [http://human.ucoz.com]
Зарядка электромобиля: где и как правильно “заправлять” электрокар, особенности домашних зарядных устройств//ЭкоТехника – Режим доступа [
https://ecotechnica.com.ua]
Типы аккумуляторных батарей для электромобилей//Информационный ресурс энергетики Ukrelektrik – Режим доступа [http://ukrelektrik.com]
"Сердце" электромобиля//ekoWheel – Режим доступа [http://ekowheel.com]
Двигатель электромобиля – разновидности и принцип работы//HEvCars – Режим доступа [https://hevcars.com.ua]
J. Bocker Ph.D/Antriebe fur umweltfreundliche Fahrzeuge//Universitat Paderborn –2016 – S. 8–13
M. Schwingshackl/Simulation von elektrischen Fahrzeugkonzepten fur PKW//TU Graz – 2009