Файл: Контрольная работа 2 Вариант 33 Вопрос 1. 4 Перечислите основные подсистемы управления сэу. Ответ.rtf
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 07.11.2023
Просмотров: 24
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Вопрос №3.1:
Перечислите замкнутые и разомкнутые (прямоточные) контуры охлаждения ДВС.
Ответ:
К замкнутым контурам охлаждения относится охлаждение на основе изменения количества охлаждающей воды, прокачиваемой через зарубашечное пространство двигателя.
К разомкнутым контурам охлаждения относится охлаждение, реализуемое следующими конструктивными способами: перепуск во внутреннем контуре; дросселирование; обвод и перепуск в контуре забортной воды.
Вопрос №3.12:
Сравните устройство простейших регуляторов давления “до себя” и “после себя”.
Ответ:
Регулятор давления “до себя” состоит из мембраны, которая воспринимает давление среды входное. Повышение входного давления приводит к прогибу мембраны, увеличению проходного сечения и расхода рабочей среды. При понижении входного давления расход рабочей среды уменьшается.
Регулятор давления “после себя” начинает действовать при изменении выходного давления. Уменьшение давления на выходе приводит к увеличению проходного сечения и уменьшается расход рабочей среды, при увеличении выходного давления приводит к уменьшению расхода рабочей среды.
Вопрос №6.2:
Какие функции выполняет система ДАУ пропульсивным комплексом?
Ответ:
Функции ДАУ пропульсивным комплексом:
- дистанционный автоматический пуск подготовленного к работе главного двигателя;
- дистанционный ввод в действие муфт сцепления дизель-редукторного агрегата, оснащенного ВРШ;
- постепенный прогрев и разгон главного двигателя после его запуска путем выполнения фиксированной во времени программы замедленного подъема частоты вращения до заданного для установок с ВФШ;
- ускоренный разгон ГД до заданного режима и быстрое при этом прохождение критической частоты вращения;
- изменение частоты вращения ГД с ВФШ или изменение шага ВРШ ;
- выполнение необходимых блокировок;
- самоконтроль исправности;
- автоматическая регистрация маневров;
- исполнительная, аварийная и аварийно-предупредительная сигнализация.
Вопрос №6.11:
Какие датчики используются в системах ДАУ для контроля мощности главных двигателей?
Ответ:
Для контроля мощности используется топливная рейка. В зависимости от ее перемещения на увеличение подачи топлива или на уменьшение определяют наполнение двигателя и соответственно мощность. Это может использоваться в системах управления нагрузкой на двигатель.
Так же для контроля мощности двигателя могут использоваться торсиометры, которые измеряют крутящий момент на валу двигателя. По значению крутящего момента определяется значение мощности.
Вопрос №7.4:
Как регулируется соотношение расходов топлива и воздуха во вспомогательных котлах?
Ответ:
Автоматическое регулирование процесса горения в топке обеспечивается воздействием на исполнительные органы подачи топлива и воздуха в соответствии с изменениями регулируемых величин. Схемы регулирования процесса горения топлива отличаются способом поддержания коэффициента избытка воздуха.
Способ регулирования процесса горения непосредственно по коэффициенту избытка воздуха распространения не получил из-за отсутствия надежных точных методов и средств его непрерывного измерения.
Косвенным способом оценки качества (экономичности) процесса горения, а следовательно, и изменения а, является анализ состава дымовых газов, покидающих точку. Входным регулирующим воздействием служит расход воздуха в топку, а выходной регулируемой величиной – содержание кислорода в дымовых газах. Реализующая данный способ схема АСР включает в себя автоматический регулятор, измеряющий состав дымовых газов и воспринимающий импульс по давлению пара в котле, который управляет ИО подачи топлива и воздуха. Однако несовершенство существующих приборов анализа дымовых газов, обладающих значительной инерционностью и запаздыванием в получении выходного сигнала при отклонении а от заданного значения, не позволяет их использовать в качестве измерителей АСР процесса горения.
Н
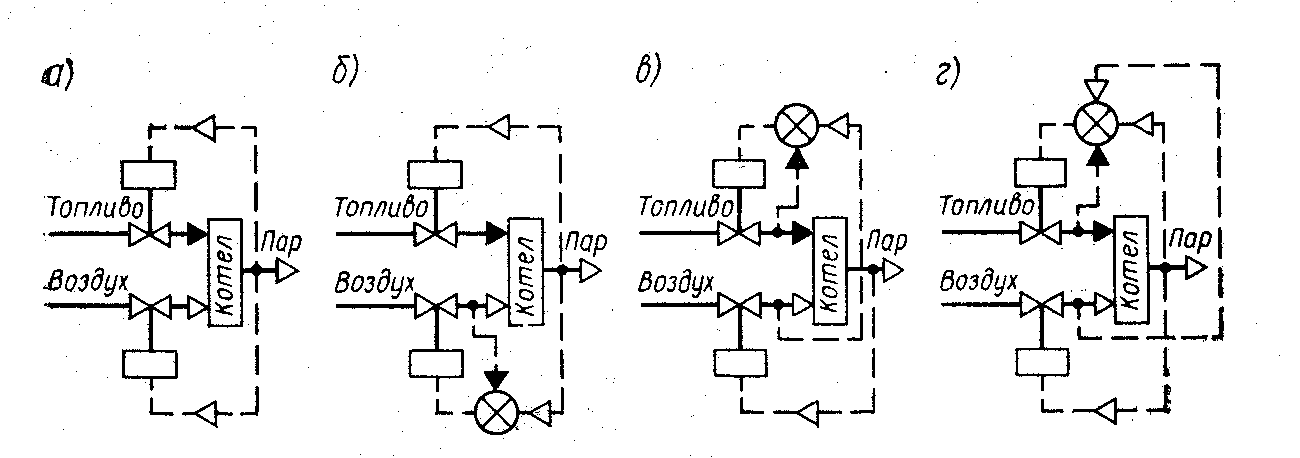 аиболее характерные для судовых КУ структурные схемы приведены на рис. 2. Параллельное управление подачей топлива и воздуха в зависимости от нагрузки котла реализует схема, изображенная на рис. 2, а. Она проста, но не обеспечивает высокой точности соотношения топливо – воздух, так как согласовать действительные расходы воздуха и топлива в оптимальном соотношении подбором характеристик ИО затруднительно.
аиболее характерные для судовых КУ структурные схемы приведены на рис. 2. Параллельное управление подачей топлива и воздуха в зависимости от нагрузки котла реализует схема, изображенная на рис. 2, а. Она проста, но не обеспечивает высокой точности соотношения топливо – воздух, так как согласовать действительные расходы воздуха и топлива в оптимальном соотношении подбором характеристик ИО затруднительно.
Рисунок 2. Схемы регулирования соотношения топливо – воздух.
Схема, показанная на рис. 2б, также осуществляет параллельное управление подачей топлива и воздуха, но расход воздуха непрерывно измеряется и корректируется обратной связью, вследствие чего его подача в топку пропорциональна управляющему сигналу. Это повышает точность поддержания заданного соотношения топливо – воздух.
Последовательное регулирование “топливо по воздуху” реализует схема, приведенная на рис. 2в. Импульс по давлению пара управляет подачей воздуха, а затем пропорционально последней устанавливается подача топлива. Посредством измерителей расходы воздуха и топлива согласовываются и соотношение топливо – воздух в установившихся режимах определяется точностью измерения указанных сред.
Схема, представленная на рис. 2г, обеспечивает параллельное управление подачей топлива и воздуха по импульсу от давления пара, а корректировку соотношения топливо – воздух – изменением подачи топлива.
Вопрос №8.8:
Какие требования предъявляются к обеспечению систем управления энергией?
Ответ:
Если механические установки получают питание от основного и аварийного источников электрической энергии, то и системы автоматизации получают питание от указанных источников. Питание систем управления главными механизмами осуществляется двумя независимыми фидерами. Один из них подключается к ГРЩ, а другой может быть подключен к щиту для ответственных потребителей (в порядке исключения - к ближайшему распределительному щиту). Переключение с основного фидера на резервный осуществляется автоматически с подачей сигнала на посту управления.
Питание системы управления приводными механизмами генераторов выполняется независимым от наличия напряжения на шинах ГРЩ. При питании систем автоматизации отдельных вспомогательных механизмов от фидеров питания их приводов предусматривается возможность включения резервного вспомогательного механизма (дизель-генератора, турбогенератора и т.д.) и подключения питания системы автоматизации к его фидеру питания в случае потери питания в цепи привода работающего вспомогательного механизма.
Системы АПС и защиты имеют основное и резервное питание. В качестве резервного предусматривается независимый источник энергии (например, аккумуляторная батарея). Переключение на него осуществляется автоматически при обесточивании основного питания с подачей сигнала АПС. Емкость резервного источника обеспечивает питание систем АПС и защиты в течение 30 минут.
Питание гидравлических и пневматических систем автоматизации производится от двух источников. Второй источник включается автоматически при падении давления. Одновременно подается сигнал АПС.
Вопрос №9.3:
Какие документы определяют правила эксплуатации средств автоматизации на судах?
Ответ:
Правила эксплуатации средств автоматизации на судах определяют следующие документы:
- Руководство по техническому надзору за судами в эксплуатации /Российский Морской Регистр судоходства.
- Сборник рекомендаций по технической эксплуатации средств автоматизации судовых энергетических установок. Вып.1. Рекомендации по эксплуатации судов без постоянного присутствия вахтенного персонала в центральном посту управления и машинных помещениях.
- Сборник рекомендаций по технической эксплуатации средств автоматизации судовых энергетических установок. Вып. 2. Типовые программы и методические рекомендации предъявления систем и устройств автоматизации Морскому Регистру судоходства в период эксплуатации судов при их освидетельствовании.
- Правила технической эксплуатации судовых технических средств и конструкций. РД 31. 21.30-97.
- Правила эксплуатации систем и устройств автоматизации на судах ФРП России.
Вопрос №9.13:
Опишите методы поиска и устранения неисправностей в бесконтактных АСУ.
Ответ:
К основным методам поиска и устранения неисправностей в бесконтактных АСУ относятся:
1) метод измерения – измерение параметров блоков, модулей, элементов и цепей. Он считается основным для электронной аппаратуры и вполне подходит для систем и устройств автоматизации, построенных на другой элементной базе.
2) метод контрольных переключений и регулировок применяется обычно на начальной стадии поиска для ориентировочного определения области неисправности с точностью до тракта, подсистемы или блока. Он предполагает использование переключателей, органов настройки и индикаторов, имеющихся на передних панелях шкафов, пультов и блоков
3) метод замены – отдельные модули, платы или блоки поочередно заменяют заведомо исправными и оценивают восстановление работоспособности объекта. Если работоспособность восстанавливается, то делается вывод о неисправности замененного последним элемента или блока.
4) метод внешнего осмотра основан на использовании внешних признаков проявления неисправностей: сваривание или окисление электрических контактов, перегревание корпусов электродвигателей и трансформаторов, появление ненормального шума, протечки гидравлической жидкости
5) метод характерных неисправностей заключается в том, что по выявленным признакам неисправности отыскиваются такие же признаки в таблице характерных неисправностей и по ней определяются элементы, которые при этом могут быть неисправными
6) метод сравнения предполагает сравнение режима работы проверяемого элемента с режимом работы исправного однотипного элемента. Он применяется в случаях, когда в системе имеются одинаковые части (элементы, модули, блоки), выполняющие подобные функции.
7) метод исключения состоит в отсоединении или отпайке предполагаемого неисправным элемента от схемы и проверке его исправности. В случае короткого замыкания отсоединение неисправного элемента может привести к исчезновению признаков отказа.
Использованная литература:
1. Ланчуковский В.И., Козьминых А.В. Автоматизированные системы управления судовыми дизельными и газотурбинными установками. - М.: Транспорт, 1990.
2. Тимофеев Ю.К. Системы управления судовыми энергетическими процессами. - СПб.: Судостроение, 1994.
3. Прохоренков А.М., Солодов В.С., Татьянченко Ю.Г. Судовая автоматика — М.: Колос, 1992.
4. Исаков Л.И.,Кутьин Л.И. Комплексная автоматизация судовых дизельных и газотурбинных установок. — Л.: Судостроение,1984.
5. Беляев И.Г, Автоматизация судовых пароэнергетических установок. – М.: Транспорт 1991.
6. Техника чтения схем автоматического управления и технологического контроля / Под ред. A.С. Клюева. – М.: Энергоатомиздат, 1991.
7. Ейдеюс А. И. Эксплуатация судовых систем и устройств автоматизации. Конспект лекций. Калининград: БГАРФ.
8. Ейдеюс А. И. АСУ СЭУ. Программа, МУ и КЗ для курсантов заочной формы обучения по специальности 240500 “Эксплуатация СЭУ” - Калининград: БГАРФ, 2001.
9. Ейдеюс А. И. Автоматизация судовых холодильных установок. Учебное пособие. Часть 3. – Калининград: БГАРФ, 2002 г.