ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 08.11.2023
Просмотров: 88
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
цилиндр повторяет движение первого цилиндра, на который подается давление насоса. Поскольку обе последовательно включенные полости цилиндров столб жидкости только перемещают, ход цилиндров вследствие внутренних, а возможно и внешних утечек, без подпитки может измениться. На рисунке 3 показано регулирование синхронного хода по принципу боуденовского троса
Во избежание нежелательных последствий такого изменения хода поршней полость "боуденовского троса" с помощью расположенного справа 4/3-распределителя 2 через каждый ход соединяется кратковременно с магистралью подачи насоса или бака.
Неравномерный ход поршня имеет следующие причины:
а) левый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 3.
Причина: недостаток жидкости между цилиндрами.
Способ устранения: с помощью левого концевика 3 включить магнит а гидравлического распределителя 2. Рабочая жидкость будет поступать в магистраль управления до тех пор, пока правый цилиндр также не включит концевой выключатель. Магнит а снова отключается.
б) Правый цилиндр первым возвращается в верхнее конечное положение и включает концевой выключатель 4.
Причина: избыток жидкости между цилиндрами.
Способ устранения: с помощью правого концевика 4 включить магнит b распределителя 2.
Этим открывается гидравлически деблокируемый обратный клапан 5 и жидкость стекает до тех пор, пока левый цилиндр также не займет конечное положение.
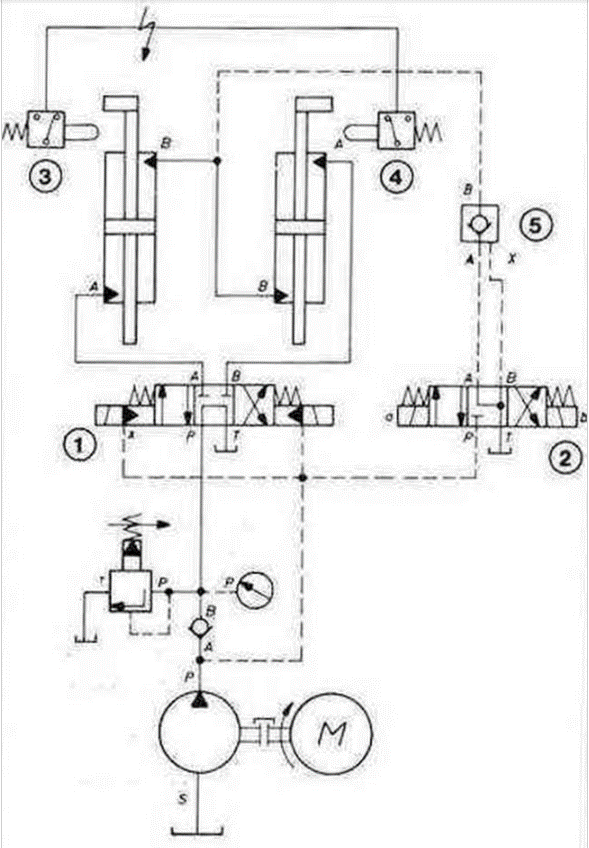
Рисунок 3. Регулирование синхронного хода по принципу боуденовского троса
С помощью левого концевого выключателя 3 магнит b отключается. В этом случае синхронность хода поршня зависит не только от количества жидкости между цилиндрами, но и от точности исполнения обоих цилиндров.
Общеизвестен тот факт, что в технике невозможно изготовить две абсолютно одинаковые детали.
Поскольку подпиточный распределитель 2, как правило, имеет золотниковую конструкцию, возникает определенная утечка.
Поэтому необходимым условием надежной работы всей системы является установка седельного обратного клапана 5.
На принципиальной схеме, рисунок 6, изображена система регулирования синхронного хода. На схеме изображены два нижних валка, регулируемых в горизонтальном
направлении. Верхний валик регулируется вертикально.
Регулирование синхронного хода осуществляется в обоих направлениях и обеспечивается за счет соединения клапана синхронного хода с подающим трубопроводом перед гидравлическими распределителями 8 и 9. а также путем соединения точек подключения А распределителей со сторонами поршневых штоков соответствующих цилиндров и точек подключения В со сторонами поршней других цилиндров. Обратные дроссельные клапаны 6 и 7 служат для декомпрессии рабочей жидкости при переключении из прессования на обратный ход.
Синхронный ход цилиндров в этой системе обеспечивается за счет того, что рабочая жидкость из опережающего цилиндра поступает во второй цилиндр определенными дозами.
Подача рабочей жидкости в цилиндры 12 и 13 осуществляется отдельно насосами 1 и 2. Таким образом, с самого начала обеспечивается некоторая предварительная дозировка.
Кроме того, в этом случае цилиндры не мешают друг другу.
Дозировка рабочей жидкости происходит через регулирующий клапан 14.
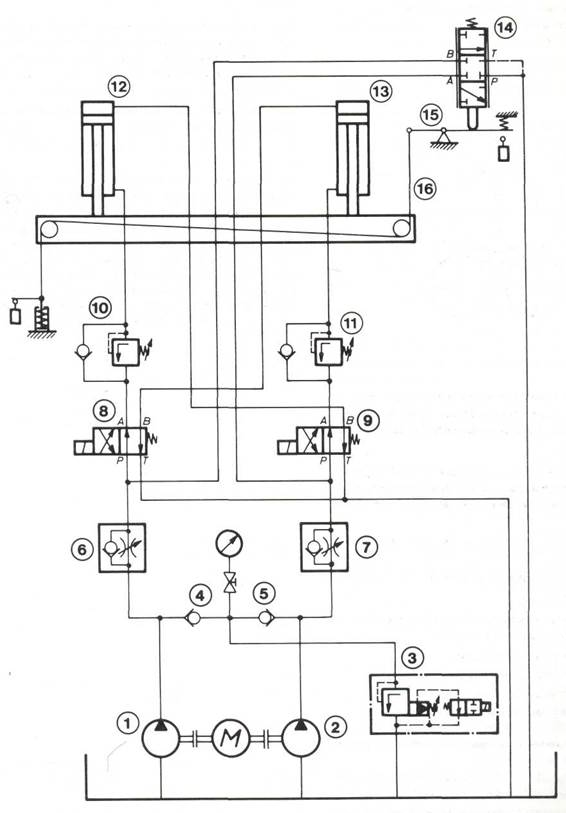
Рисунок 4. Регулирование синхронного хода по принципу боуденовского троса
Регулирующий клапан компенсирует разность рабочей жидкости, которая может возникнуть: из-за неодинаковой подачи насосов, в результате сжатия рабочей жидкости, вследствие неодинаковой утечки в приборах, в результате люфтов подшипников машины.
Направление движения цилиндров определяется распределителями 8 и 9. Напорные клапаны 10 и 11 при выдвижении цилиндров выполняют функции клапанов противодавления.
Качество работы клапана синхронного хода в основном зависит от работы системы обнаружения ошибок.
Регулирующий клапан, как изображено на принципиальной схеме, включается с помощью балансира 15.
Достоинства регулирование синхронного хода по принципу боуденовского троса:
1) высокий КПД,
2) высокая точность регулирования,
3) возможность плавного регулирования в широком диапазоне.
Недостатки дроссельного регулирования:
1) сложность конструкции,
2) высокая стоимость.
4. Регулирование следящей системой.
Следящим называется гидропривод, в котором перемещение выходного звена находится в строгом соответствии с величиной управляющего воздействия.
Следящие гидроприводы нашли широкое применение в системах ручного и автоматического управления различными машинами, агрегатами и производственными процессами. В этих системах следящий гидропривод используется в качестве гидравлического усилителя мощности — устройства, которое, помимо передачи сигнала управления, обеспечивает одновременное увеличение его мощности за счет использования возможностей гидропривода.
Коэффициент усиления гидроусилителя определяется отношением мощности, реализуемой на выходном звене, к мощности сигнала управления гидроприводом. Величина этого коэффициента практически не ограничена. Например, в системах рулевого управления крупными морскими судами используют гидравлические следящие приводы с коэффициентом усиления до 105, а в системах автоматики в гидроприводах с электрическим управлением — до 107. Такое высокое значение коэффициента усиления достигается за счет очень малой мощности управляющего сигнала. Так, например, мощность входного управляющего сигнала в гидроусилителе с электрическим управлением составляет 0,5... 1 Вт, а усилие для перемещения некоторых вспомогательных золотников не превышает 40 мН.
Как и все следящие приводы, следящий гидропривод является автоматическим устройством, которое в соответствии с теорией автоматического управления относится к автоматическим системам с отрицательной обратной связью. Блок-схема такого привода приведена на рисунке 5.
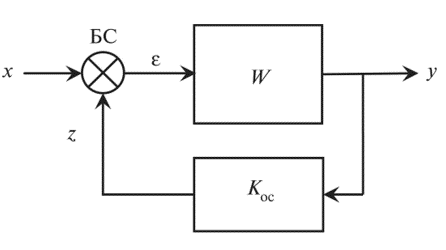
Рисунок 5. Блок-схема следящего привода
В таких системах в блоке согласования БС происходит непрерывное сравнение входного сигнала управления х и сигнала обратной связи z, который формируется на основании величины перемещения выходного звена у:

где Кос — коэффициент усиления цепи обратной связи.
Образующийся в блоке согласования БС сигнал рассогласования в (разность между сигналами х и z) в процессе работы привода постепенно уменьшается, и когда эта разность станет равной нулю, перемещение выходного звена привода прекратится. При этом считается, что следящий привод выполнил свою функцию: его выходное звено переместилось на величину у, пропорциональную величине управляющего сигнала х.
Рассмотрим, как этот принцип автоматического управления реализуется в некоторых следящих гидроприводах.
На рисунке 6 приведена принципиальная схема следящего гидропривода поступательного движения, использующегося в качестве гидроусилителя руля колесной транспортной машины. При повороте рулевого колеса, например, по часовой стрелке посредством винтовой подачи 2 золотник 4 дросселирующего гидрораспределителя 3 сместится влево и соединит верхнюю полость гидроцилиндра 8 с напорной гидролинией (р
н), а нижнюю — со сливной гидролинией (рс).
Под действием потока рабочей жидкости поршень цилиндра 8 начнет перемещаться вниз, поворачивая жестко связанную с ним рулевую тягу 7 и вместе с ней управляемое колесо 6 машины. Поворот колеса 6 будет происходить до тех пор, пока корпус распределителя 3, перемещающийся под воздействием рычагов обратной связи 5, не сместится влево на величину хода, равного смещению золотника 4. При этом вновь перекроются каналы, открывшиеся при изначальном смещении золотника 4 в распределителе 3.
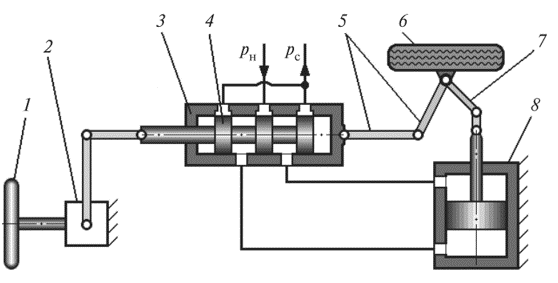
Рисунок 6. Принципиальная схема гидроусилителя руля автомобиля
Итак, в данном случае сравнение сигнала управления (поворот рулевого колеса) и величины угла поворота управляемых колес машины происходит в дросселирующем гидрораспределителе 3. Результатом этого сравнения является некоторое открытие проходных сечений в нем, а, следовательно, определенная величина расхода рабочей жидкости в соответствующую полость гидроцилиндра 8. Как только площадь проходных сечений в дросселирующем распределителе 3 в результате отработки управляющего сигнала вновь значит,
что следящий гидропривод отработал поступивший на него сигнал управления.
Чтобы вернуть управляемые колеса 6 машины в первоначальное положение, необходимо повернуть рулевое колесо 1 на такой же угол против часовой стрелки, в результате чего золотник 4, поршень гидроцилиндра 8, рулевая тяга 7и, следовательно, корпус распределителя 3 возвратятся в исходное положение.
Коэффициент усиления гидроусилителя ку по силе в этом случае можно выразить в виде отношения ку = F/Fy, где F — усилие, развиваемое поршнем гидроцилиндра 8; Fy — усилие, необходимое для перемещения золотника 4.
5. Регулирование делителями потока.
Синхронизацию движения выходных звеньев можно осуществить с помощью делителя потока, гидромоторов, расходомеров, линейных датчиков. Рассмотрим каждый из вариантов синхронизации подробно.
Синхронизация движения гидродвигателей осуществляется с помощью делителя потока. Принцип действия, которого основан на дросселировании. В точке М поток разветвляется на два, каждый из которых проходит через постоянный дроссель 1, а затем подводится к гильзе 2 с плавающим поршнем 3. Последний играет роль клапана, перемещаясь в ту или другую сторону, в зависимости от действующей на него разности давлений. Перемещаясь в сторону меньшего давления, например, в право, поршень 3 уменьшает площадь отверстия 5 и увеличивает площадь отверстия 4. Поршень остановится тогда, когда давление в правой и левой полостях гильзы, а, следовательно, и расходы через эти полости будут одинаковы. А значит скорости выходных звеньев обоих гидроцилиндров будут равны.
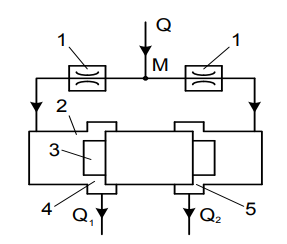
Рисунок 7. Схема делителя потока
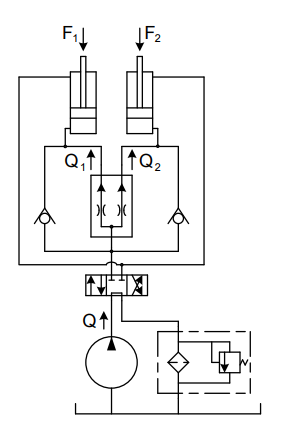
Рисунок 8. Схема синхронизации с применением делителя потока.
Достоинства регулирования скоростей делителями потока:
1) Точность регулирования;
2) Соотношение расходов выходных потоков жидкости поддерживается автоматически вне зависимости т изменения давления на любом из выходов;
3) Возможность деления потока в зависимости от геометрических параметров гидроцилиндров
4) Высокая плавность хода.
5) Высокий КПД
Недостатки регулирования скоростей делителями потока:
1) нагрев рабочей жидкости, необходимость проводить тепловой расчет и при необходимости установить теплообменник.
Заключение
Из всех рассмотренных выше вариантов регулирования наиболее оптимальным является регулирование делителями потока так как он выгодно отличается от других вариантов, простотой конструкции, высоким КПД и надежностью, автоматическим поддерживанием потоков жидкости и высокой плавностью хода.
У делителей потока имеется лишь один недостаток это нагрев жидкости, который решается или увеличением гидравлического бака, или установкой теплообменика.
СПИСОК ЛИТЕРАТУРЫ
-
Башта Т.М. Гидравлика, гидромашины и гидроприводы. М.: Машиностроение, 2010. -
Абрамов Е.И., Колесниченко К.А., Маслов В.Т. Элементы гидропривода: Справочник. 2-е изд., прераб. Киев: Техника, 1977. -
Навроцкий К.Л. Теория и проектирование гидро- и пневмоприводов. М.: Машиностроение, 1991. 383 с. -
Чупраков Ю.И. Гидропривод и средства гидроавтоматики. М.: Машиностроение, 1979. 232 с.