Файл: Отчет по лабораторной работе 3 по дисциплине Динамика полета на тему Исследование системы улучшения устойчивости и управляемости бокового движения. Демпфер рыскания.docx
Добавлен: 09.11.2023
Просмотров: 36
Скачиваний: 3
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)
Кафедра №301
Отчет по лабораторной работе № 3
по дисциплине «Динамика полета»
на тему: «Исследование системы улучшения устойчивости и управляемости бокового движения. Демпфер рыскания»
Выполнили: студенты гр. М30-301С-18
Сазонова Е.В, Романычев А.В., Воропаева С.М.
Принял: доцент кафедры 301
______________ П.В. Мулин.
Москва, 2021 г.
Постановка задачи исследования:
-
Создать схему имитационного моделирования изолированного движения рыскания в среде MATLAB-SIMULINK. Отобразить схему в отчете. -
Построить графики реакции на единичное ступенчатое воздействие по координатам
по координатам  и
и  .
. -
Создать схему имитационного моделирования изолированного движения рыскания с демпфером в среде MATLAB-SIMULINK. Отобразить схему моделирования в отчете. -
Для желаемого значения из уравнения (1) найти значение
из уравнения (1) найти значение  .
. -
Выбрать из условия обеспечения
из условия обеспечения
-
Построить графики реакции на единичное ступенчатое воздействие по координатам и для двух случаев:
по координатам и для двух случаев:


-
Определить перерегулирование, время переходного процесса .
.
Исходные данные:
Значения параметров объекта управления взять из таблицы
 |  |  |  |  |
| 0.3 | 0.4 | 0.7 | 0.1 | 0.03 |
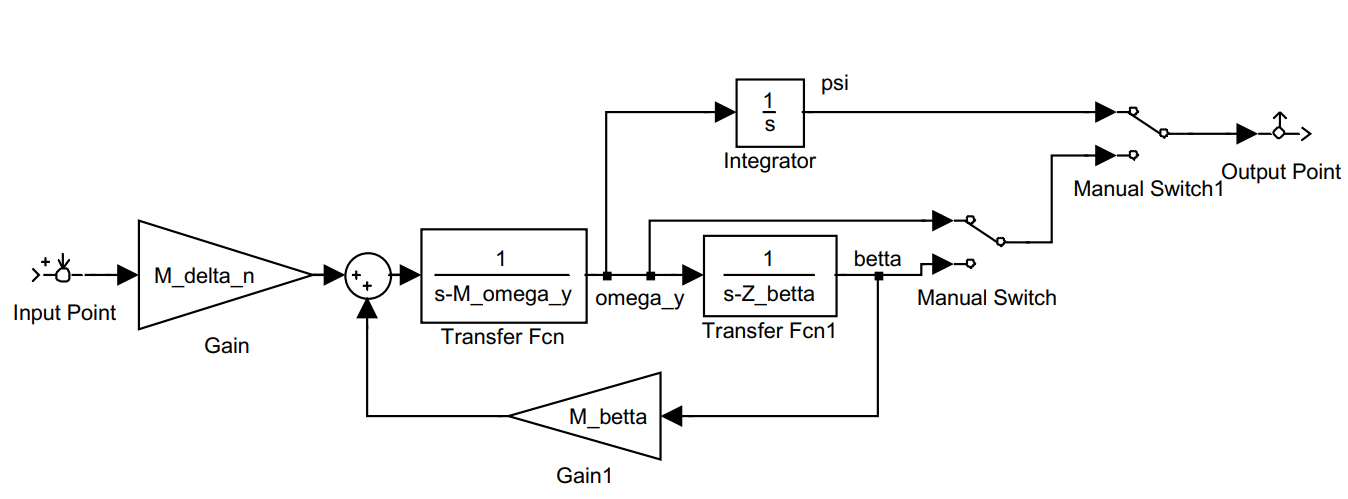
Рисунок 1. Simulink-модель схемы имитационного моделирования изолированного движения рыскания
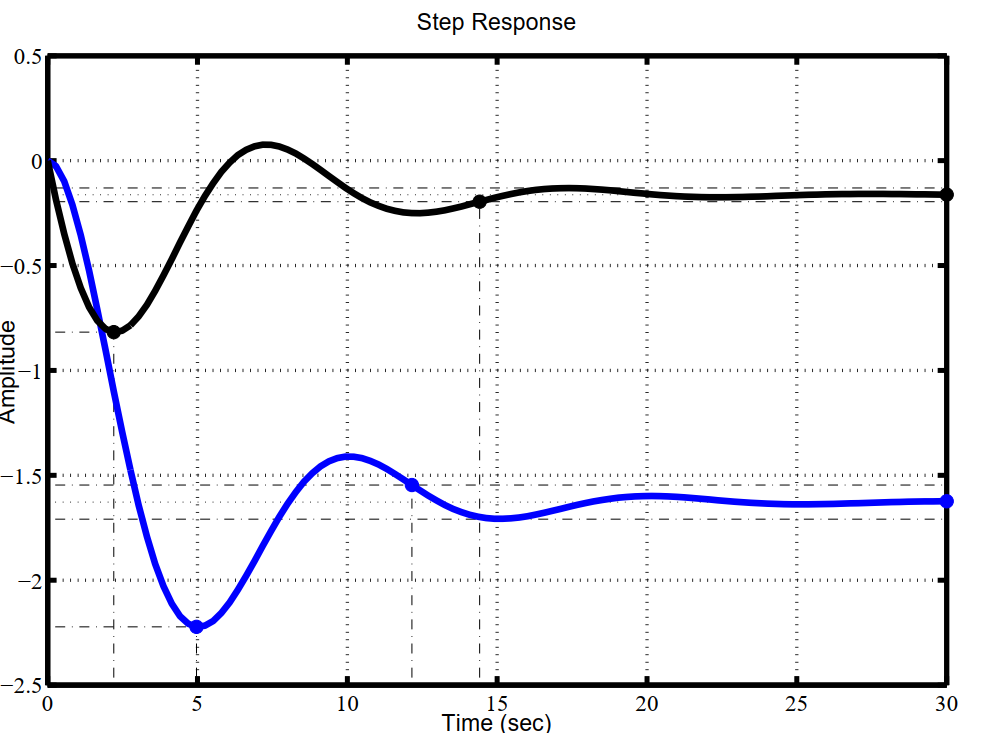
Рисунок 2. Графики переходных процессов по координатам

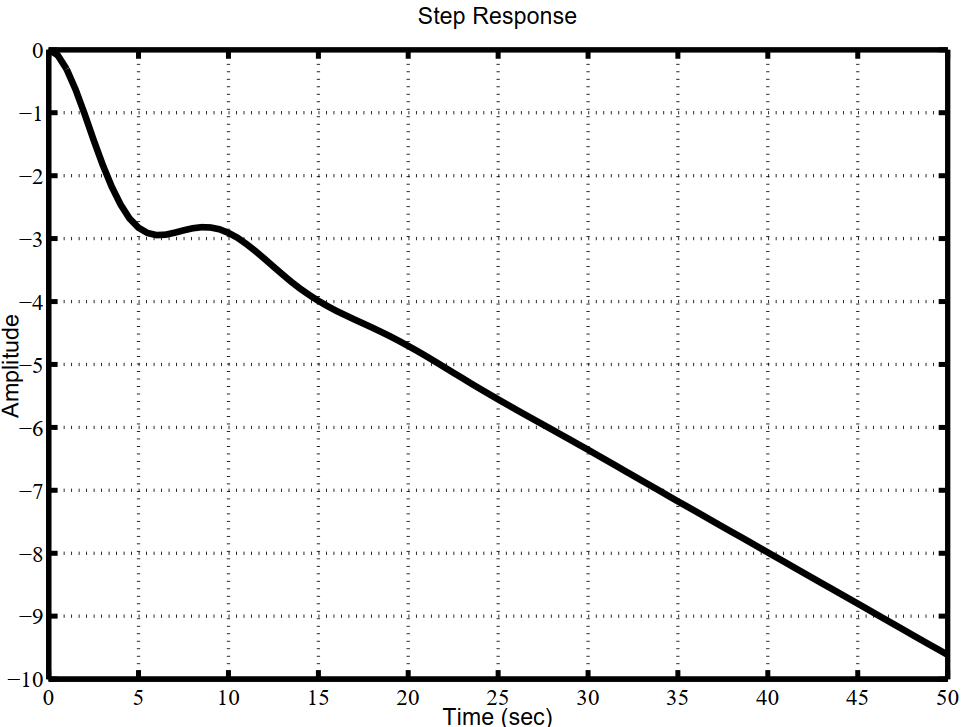
Рисунок 3. График переходного процесса по координате

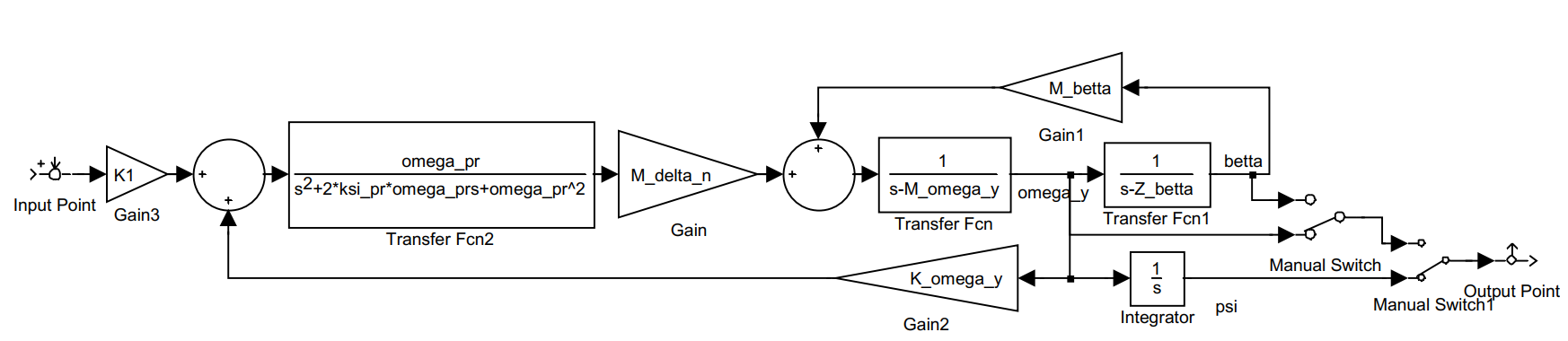
Рисунок 4. Simulink-модель схемы имитационного моделирования изолированного движения рыскания с демпфером
Из уравнения
 для желаемого значения
для желаемого значения  найдем значение
найдем значение  .
.Из условия
 найдем значение
найдем значение  .
.Список команд:
syms K_omega_y
A1=0.3;
A2=0.4;
A3=0.7;
A4=0.1;
A7=0.03;
M_delta_n=-A3;
M_omega_y=-A1;
M_betta=-A2;
Z_betta=-A4;
K_omega_y=vpa(solve(A1*A4+A2+K_omega_y*A3*A4-((A1+A4+K_omega_y*A3)^2)/2), 4)
Полученный результат:

Из условия обеспечения
 найдем
найдем 
Список команд:
syms K_omega_y K1 s
A1=0.3;
A2=0.4;
A3=0.7;
A4=0.1;
A7=0.03;
M_delta_n=-A3;
M_omega_y=-A1;
M_betta=-A2;
Z_betta=-A4;
omega_pr=20;
ksi_pr=0.707;
K_omega_y=0.8414
A_pr=omega_pr^2;
B_pr=s^2+2*ksi_pr*omega_pr*s+omega_pr^2;
W_pr=A_pr/B_pr;
W1=1/(s-M_omega_y);
W2=1/(s-Z_betta);
W_omega_y=collect(K1*W_pr*M_delta_n*W1/(1-W1*W_pr*M_delta_n*K_omega_y-W1*W2*M_betta),s)
W_omega_y=subs(W_omega_y,s,0)
K1=vpa(solve(W_omega_y-1),4)
Полученный результат:

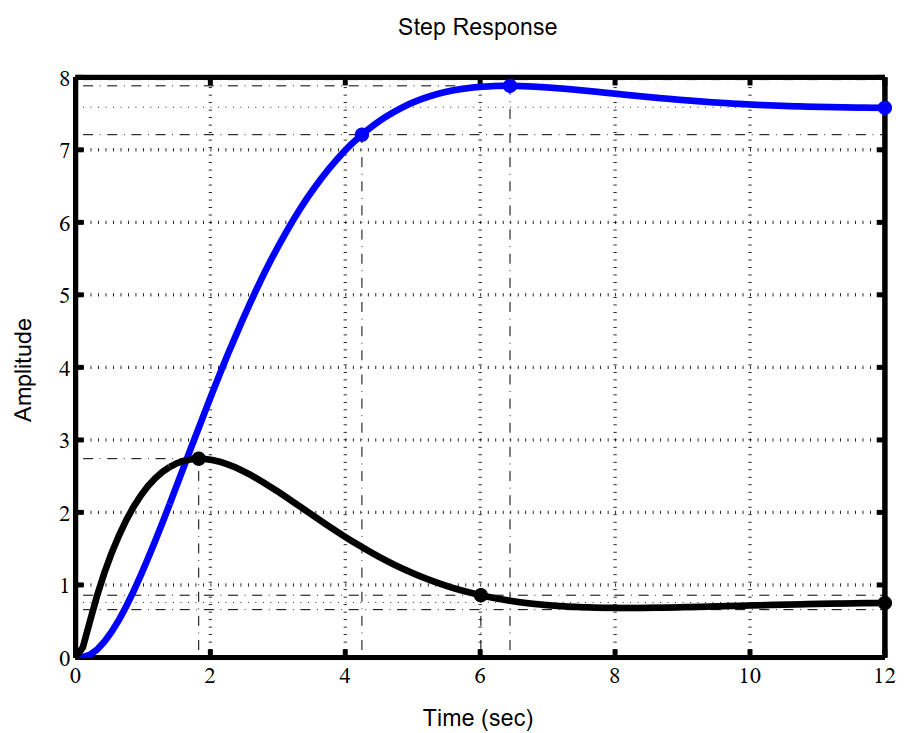
Рисунок 4. Графики переходных процессов по координатам
при 
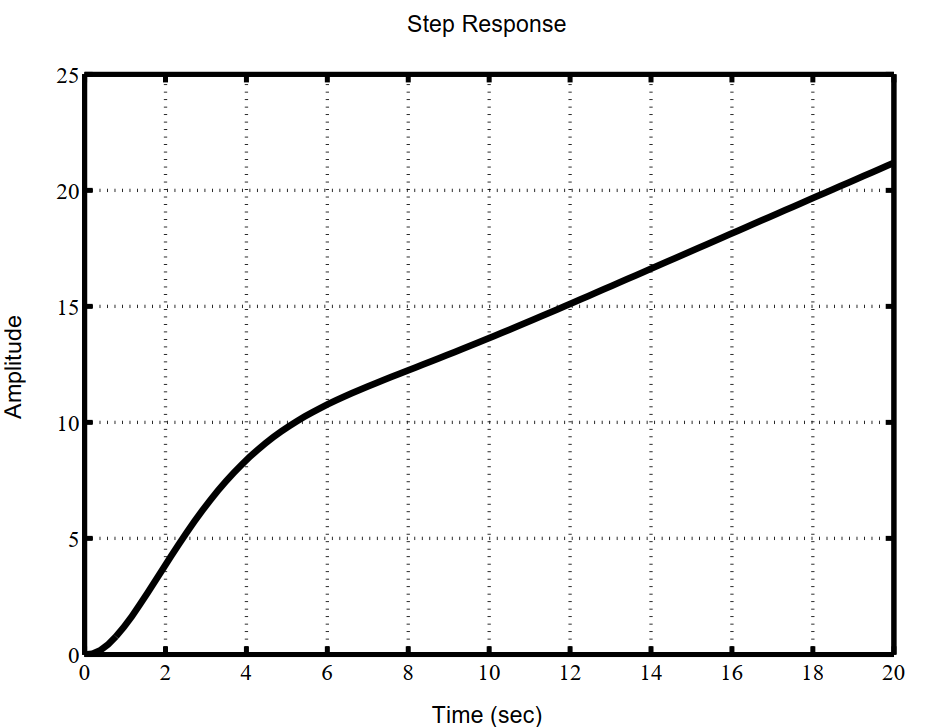
Рисунок 5. График переходного процесса по координате
при 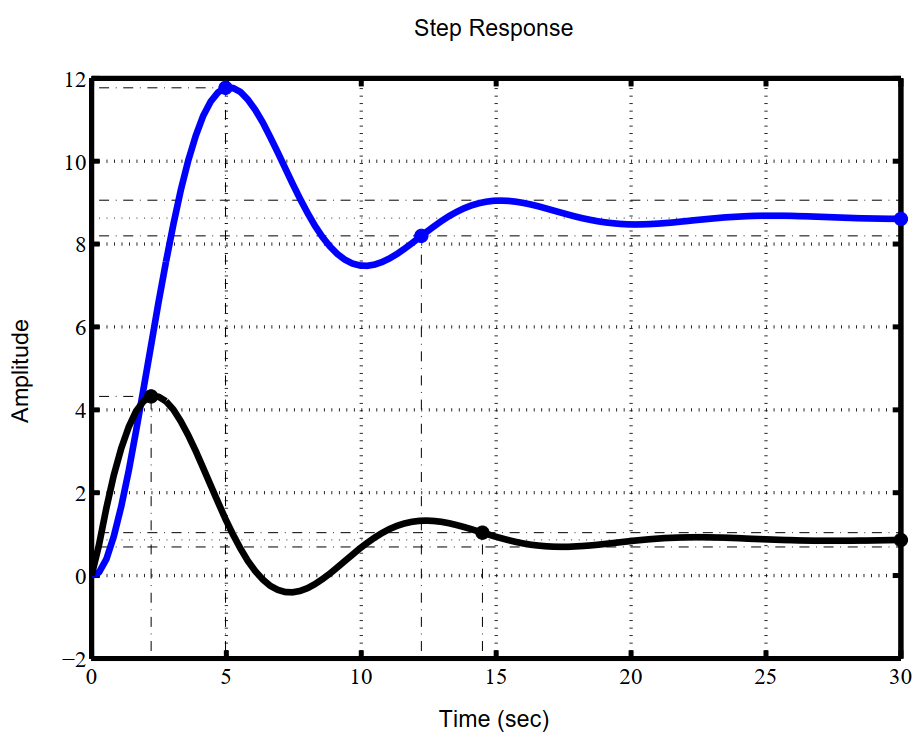
Рисунок 6. Графики переходных процессов по координатам
при 
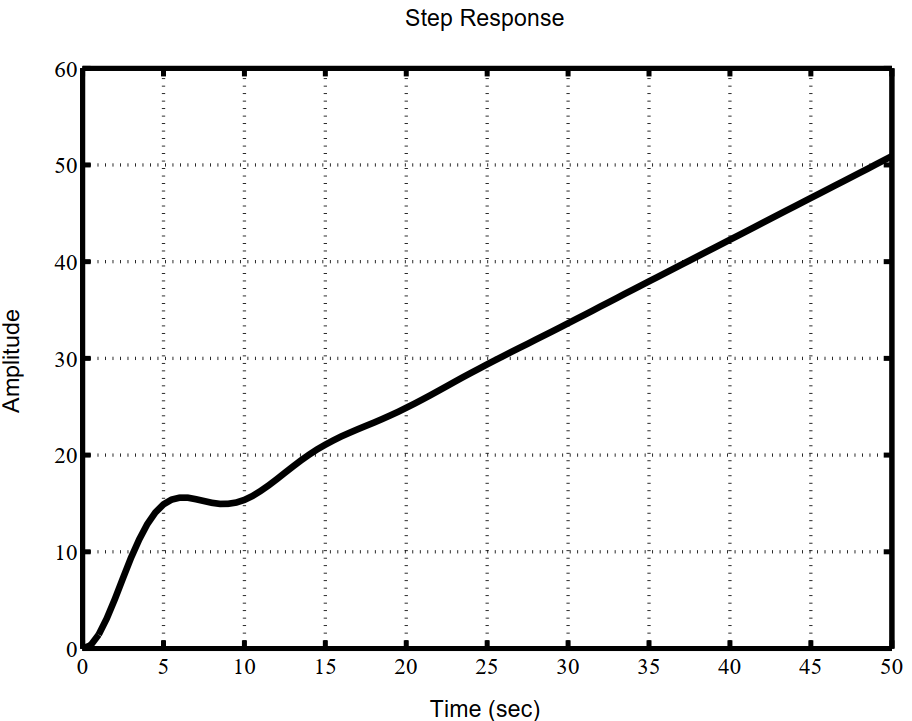
Рисунок 7. График переходного процесса по координате
при