Файл: Разработка электронного блока абсолютного преобразователя линейных перемещений.docx
Добавлен: 09.11.2023
Просмотров: 330
Скачиваний: 13
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
(национальный исследовательский университет)»

| Институт №3 | Кафедра №301 |
Пояснительная записки к курсовой работе
по дисциплине
«Электроника»
на тему:
«Разработка электронного блока абсолютного преобразователя линейных перемещений»
Выполнил: студент гр. М30-302Бки-20
Кхайрил Мирза Шах Бин Базерин___________
Принял: Ассистент кафедры 301___________
Булычев Р.П.
«___»______________2022 г.
Москва, 2022 г.
Содержание
Задание 3
Введение 5
Топология кодирующей маски преобразователя линейных перемещений 6
Описание функциональной схемы 11
Разработка схему электрическую принципиальную преобразователя 13
Расчет параметров элементов преобразователя линейных перемещений 15
Расчет тока фотодиода 15
Расчет преобразователя ток-напряжение 21
Расчет компаратора 23
Реализация индикации 26
Выводы 28
Список использованной литературы 29
Задание
-
Исходные данные:
| № пп | Диапазон возможных перемещений | Погрешность измерения, % | Отображение информации |
| A3 | -250 … +350 мм | 0,1 | для условий малой освещенности |
-
Диапазон возможных перемещений : 250 ….+350 мм = 600 мм
250 ….+350 мм = 600 мм -
Погрешность измерения : δx = 0,1% -
Напряжение питания 27 В, 400 Гц.
-
Функциональная схема абсолютного преобразователя.
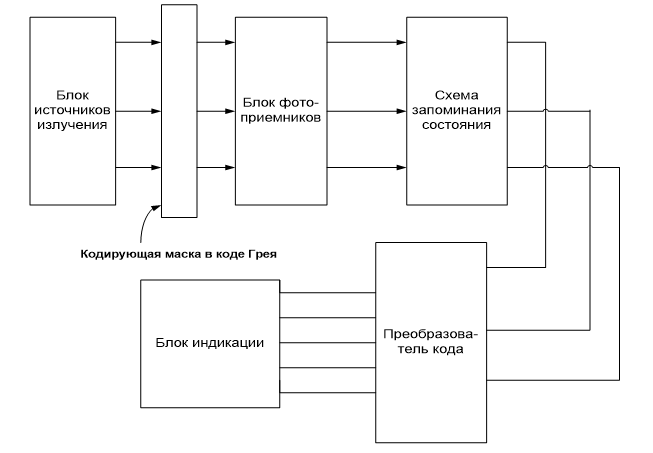
Рисунок 1. Функциональная схема абсолютного преобразователя
-
Разработать структурную схему абсолютного преобразователя -
Разработать топологию первичного преобразователя -
Разработать принципиальную электрическую схему абсолютного преобразователя -
Рассчитать параметры абсолютного преобразователя.
Введение
Линейный энкодер (linear encoder) – это датчик для контроля перемещения, положения или скорости по линейным осям. Движение считывающего узла относительно шкалы приводит к возникновению импульсов, которые сообщают информацию о перемещении в приёмное устройство. Принцип работы энкодерного датчика заключается в преобразовании механического перемещения в электрические сигналы. Энкодер называют датчиком обратной связи. Энкодерный датчик формирует и сообщает устройству управления верхнего уровня код точного положения вала за единицу времени.
Код Гре́я — двоичный код, иначе зеркальный код, он же код с отражением, в котором две «соседние» кодовые комбинации различаются только цифрой в одном двоичном разряде. Иными словами, расстояние Хэмминга между соседними кодовыми комбинациями равно 1.
Топология кодирующей маски преобразователя линейных перемещений
Для разработки маски, необходимо вычислить шаг, с которым будет происходить измерения.
Экспериментальное значение:

Расчёт маски:
Определим количество разрядов N.

| n | X,mm | двоичный код | код Грея |
| 0 | 0,6 | 0000 | 0000 |
| 1 | 1,2 | 0001 | 0001 |
| 2 | 1,8 | 0010 | 0011 |
| ..... | ..... | .... | .... |
| 499 | 299.4 | 111110011 | 100001010 |
| 500 | 300 | 111110100 | 100001110 |
| 501 | 300.6 | 111110101 | 100001111 |
| .... | .... | ….. | ….. |
| 998 | 598.8 | 1111100110 | 1000010101 |
| 999 | 599.4 | 1111100111 | 1000010100 |
| 1000 | 600 | 1111101000 | 1000011100 |
В маске используется код Грея. В таблице ниже показана разница между двоичным кодом и кодом грея.
Рисунок 2. Таблица кода грея и двоичного кода.
В маске используется код Грея. Затененная часть имеет значение '0', в то время как не затененная часть имеет значение '1'.
| N= | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | | 10” |
| | | | | | | | | | | | 0000000000 | 0 |
| | | | | | | | | | | | 0000000001 | 1 |
| | | | | | | | | | | | 0000000011 | 2 |
| | | | | | | | | | | | 0000000010 | 3 |
| | | | | | | | | | | | 0000000110 | 4 |
| | | | | | | | | | | | 0000000111 | 5 |
| | | | | | | | | | | | 0000000101 | 6 |
| | | | | | | | | | | | 0000000100 | 7 |
| | | | | | | | | | | | 0000001100 | 8 |
| | | | | | | | | | | | 0000001101 | 9 |
| | | | | | | | | | | | 0000001111 | 10 |
| | | | | | | | | | | | 0000001110 | 11 |
| | | | | | | | | | | | 0000001010 | 12 |
| | | | | | | | | | | | 0000001011 | 13 |
Рисунок 3. Циклические кодовые шкалы.
Описание функциональной схемы
-
Функциональная схема абсолютного преобразователя
Рисунок 4. Функциональная схема абсолютного преобразователя
Функциональная схема преобразователя линейных перемещений состоит из десяти источников излучения (светодиоды), позиционирующей кодирующей маски, десяти фотодиодов, десяти усилителей, преобразователей кода и блока индикации.
Источником излучения служат светодиоды (ЗЛ107A), свет из которых, по световодам проходит через кодирующую решетку и попадает через световоды на фотодиоды (ФД-19К). На границах «светодиод – световод», «световод – маска – среда» и «световод – фотодиод» устанавливаются линзы для предотвращения рассеивания светового потока. Ток от фотодиода поступает на усилитель и с помощью компаратора преобразуется в напряжение.
Кодирующая маска разделена на 1000 линий по 0,6 мм каждая, каждая линия имеет 10 отверстий. Таким образом, каждая строка кодируется соответствующим двоичным десятизначным числом. Для кодирования использовался код Грея – код, в котором при переходе на следующую позицию изменяется значение только одной цифры.Маска выполнена на тонком стекле (0.3 мм). Отверстия (в виде щелей) выполнены по методу точной фотолитографии.
Далее импульсы от дополнительного отверстия и отверстия, соответствующего младшей цифре кода Грея, попадают на блок выбора направления. Сигнал от блока выбора направления позволяет считывать данные с одной из двух схем памяти состояния. Из него двоичный код поступает в преобразователь кодов, а затем в блок отображения.
Разработка схему электрическую принципиальную преобразователя
 Рисунок 5. Схема электрическая принципиальная.
Рисунок 5. Схема электрическая принципиальная.
Рисунок 6. Перечень элементов схема электрическая принципиальная
На схеме (Рис. 5.) показаны 10 используемых фотодиодов (ФД19К), 10 усилителей (140УД6), 10 компараторов, ПЗУ (23K256-1), а также используемый декодер (KM55IL6) и используемый индикатор (NC 15-6/7). Между фотодиодом и компаратором должен стоять усилитель (140УД6) с единичным коэффициентом усиления и большим входным сопротивлением. Используем в качестве компаратора операционный усилитель с положительной обратной связью. Необходимо обеспечить срабатывание и отпирание компаратора при разных напряжениях. Затем выполняется преобразование двоичного кода в серый с помощью логических элементов XOR. Затем двоичный код поступает в ПЗУ, а также в дешифратор и индикатор.
Выбор свето- и фотодиодов.
| Схема | Модель Светодиод: ЗЛ107A | Модель Фотодиод: ФД19К |
 | Характеристики | |
| Мощность излучения:  6 мВт; 6 мВт; Видимый телесный угол:  25 25 ; ; Прямое напряжение: 2 В; Прямой ток:  100 мА; 100 мА; | Площадь фоточувствительного элемента (эффективная): 1  ; ;Темновой ток (не более): 0.1мкА; Длина волны:  мкм мкмТоковая чувствительность:  0.3 мА/мВт 0.3 мА/мВт | |
Расчет параметров элементов преобразователя линейных перемещений
Расчет тока фотодиода
Выберем светодиод, пусть ЗЛ107А. Он имеет следующие параметры:
Iсд = 100мА
Pсд= 6 мВт
Вт Ѳ= 25˚
На рисунке ниже показана взаимосвязь между мощностью светодиода и током светодиода.


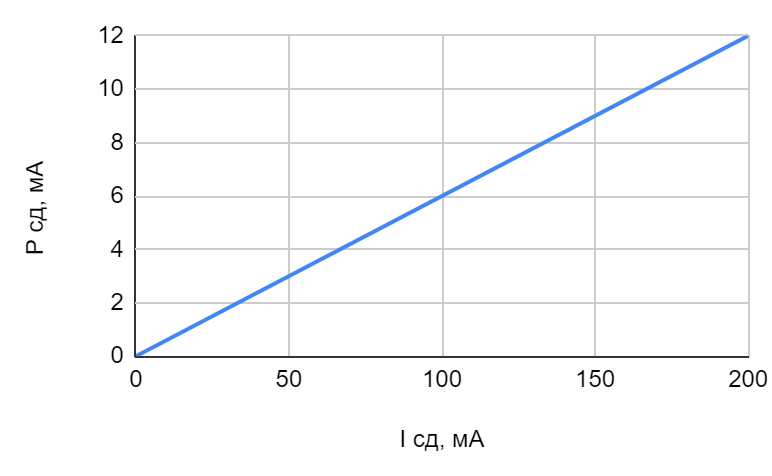
Рисунок 7. Взаимосвязь между мощностью и током светодиода.
Определим максимальную мощность на фотоприемниках

где

Определение коэффициента потерь;
Рисунок 8. Угол наклона светового диода и фотодиода